马达的制作方法
1.本发明涉及马达。
背景技术:
2.马达包括轴、转子和定子。在转子中可以设置有多个磁体。马达分为内部永磁(ipm)马达或表面永磁(spm)马达,在内部永磁(ipm)马达中,磁体插入到转子的芯中,在表面永磁(spm)马达中,磁体附接至转子的芯的表面。
3.在ipm马达中,存在一种轮辐型马达。在轮辐型马达的情况下,径向地设置有长度大于宽度的磁体。磁体可以设置在转子芯的槽袋中。轮辐型马达具有输出密度高的特征。在这种情况下,在轮辐型马达中,当轮辐型马达被驱动时,由于高通量导致齿槽转矩增加,并且因此存在马达的性能劣化的问题。因此,需要通过改进转子芯的形状来减小马达的齿槽转矩。
技术实现要素:
4.技术问题
5.本发明旨在提供一种能够通过改进转子芯的形状来减小齿槽转矩的马达。
6.技术方案
7.本发明的一个方面提供了一种马达,该马达包括轴、联接至轴的转子和设置在转子外侧的定子,其中,转子包括转子芯和磁体,转子芯具有绕轴径向地形成的多个槽袋,磁体插入到槽袋中,转子芯包括沿轴向方向堆叠的多个芯板,芯板包括中央部分、连接至中央部分的多个径向部分,所述多个径向部分中的每一者均包括形成槽袋的表面和具有阶状部的带台阶部分,并且所述多个带台阶部分包括具有不同形状的第一带台阶部分、第二带台阶部分、第三带台阶部分和第四带台阶部分中的至少两者。
8.槽袋的数量可以是n,并且一个芯板可以相对于在轴向方向上堆叠在其上的另一芯板旋转360/n
°
。
9.被堆叠起来的芯板的带台阶部分的形状在轴向方向上不同或相同。
10.在第一带台阶部分中,径向部分的一侧与槽袋可以在径向方向上重叠,在第二带台阶部分中,径向部分的两侧与槽袋均可以在径向方向上重叠,在第三带台阶部分中,径向部分的另一侧与槽袋可以在径向方向上重叠,并且在第四带台阶部分中,径向部分与槽袋可以在径向方向上不重叠。
11.在第一带台阶部分中,可以从径向部分的一个表面—其形成槽袋—突出有突出部,并且另一表面的面向突出部的部分可以凹入。
12.可以从径向部分的一个表面和另一表面突出有突出部,其中该一个表面和另一表面形成槽袋。
13.从径向部分的一个表面和另一表面突出的突出部可以彼此间隔开,其中该一个表面和另一表面形成槽袋。
14.在第三带台阶部分中,径向部分的一个表面—其形成槽袋—可以凹入,并且可以从另一表面的面向凹入位置的部分突出有突出部。
15.在第四带台阶部分中,径向部分的一个表面和另一表面可以凹入,其中该一个表面和所述另一表面形成槽袋。
16.第二带台阶部分或第四带台阶部分沿周向方向可以设置在彼此间隔开的第一带台阶部分和第三带台阶部分之间。
17.第二带台阶部分或第四带台阶部分沿轴向方向可以设置在彼此间隔开的第一带台阶部分和第三带台阶部分之间。
18.有益效果
19.根据本发明,通过改进转子的槽袋的形状,可以在保持轮辐型马达的磁性力高的性能的同时降低齿槽转矩,并且因此可以改进马达的性能。
20.根据本发明,通过改进转子的槽袋的形状,可以提供偏斜角度的效果,可以降低转子制造中偏斜角度的成本,并且因此可以提供低成本且高效率的马达。
附图说明
21.图1是图示了根据一实施方式的马达的横截面图。
22.图2是图示了图1中所示的转子的平面图;
23.图3是图示了将图2中所示的转子芯的芯板堆叠起来的状态的分解立体图。
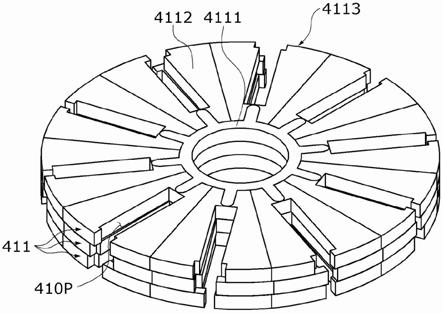
24.图4是图示了将图3中所示的转子芯的芯板堆叠起来的状态的立体图。
25.图5是图示了图3中所示的芯板的立体图。
26.图6是图示了围绕槽袋的带台阶部分的放大侧视图。
27.图7示出了说明根据马达的极数和槽数的振动方向的视图。
28.图8是示出了常规马达的根据旋转角度的齿槽转矩值和根据本发明的实施方式的马达的旋转角度的齿槽转矩值的曲线图。
具体实施方式
29.在下文中,将参照附图详细地描述本发明的示例性实施方式。
30.然而,本发明的技术精神不限于将被描述的一些实施方式并且可以以各种不同的形式来实现,并且这些实施方式中的一个或更多个部件可以选择性地被联接、替换和使用以实现该技术精神的范围内的技术精神。
31.另外,除非由上下文另外明确且具体地定义,否则本文中使用的所有术语(包括技术术语和科学术语)对于本领域技术人员而言可以被解释为具有惯常含义,并且通常使用的术语——比如在通常使用的词典中定义的术语——的含义将通过考虑相关技术的上下文含义来解释。
32.另外,本发明的实施方式中使用的术语是在描述性意义上考虑的,而不是用于限制本发明。
33.在本说明书中,除非上下文另外清楚地指出,否则单数形式包括其复数形式,并且在描述“a、b和c中的至少一者(或者一者或更多者)”的情况下,这可以包括a、b和c的所有可能组合中的至少一种组合。
34.另外,在本发明的部件的描述中,可以使用诸如“第一”、“第二”、“a”、“b”、“(a)”和“(b)”之类的术语。
35.这些术语仅是为了将一个元件与另一元件区分开,而元件的本质、顺序等不受这些术语限制。
36.另外,应当理解的是,当一个元件被称为“连接或联接”至另一元件时,这样的描述可以包括该元件直接连接或联接至另一元件的情况;以及该元件通过设置在该元件与另一元件之间的又一元件而连接或联接至该另一元件的情况。
37.另外,在任一元件被描述为形成或设置在另一元件“上或下”的情况下,这样的描述包括这两个元件被形成为或被设置成彼此直接接触的情况以及一个或更多个其他元件插入在这两个元件之间的情况。另外,当一个元件被描述为设置在另一元件“上或下”时,这样的描述可以包括一个元件相对于另一元件设置在上侧处或下侧处的情况。
38.图1是图示了根据一实施方式的马达的横截面图。
39.参照图1,根据该实施方式的马达1可以包括:壳体100,在该壳体100中,在一侧形成有开口;盖200,该盖200设置在壳体100上;定子300,该定子300设置在壳体100中;转子400,该转子400设置在定子300内侧;轴500,该轴500联接至转子400并旋转;汇流条600,该汇流条600设置在定子300上方;以及传感器部分700,该传感器部分700检测轴500的旋转。
40.壳体100和盖200可以形成马达1的外部。壳体100和盖200联接以形成容纳空间。在这种情况下,定子300、转子400、轴500等可以设置在容纳空间中。在这种情况下,轴500以可旋转的方式设置在容纳空间中。因此,马达1还可以包括设置在轴500的上部部分和下部部分中的轴承10。
41.壳体100的形状或材料可以以各种方式改变。例如,壳体100可以由即使在高温下也能稳固地承受的金属材料形成。
42.盖200设置在壳体100上以覆盖壳体100。
43.定子300可以设置在壳体100内侧。在这种情况下,定子300可以通过热压配合方法联接至壳体100。因此,定子300可以由壳体100的内周表面支承。
44.定子300设置在转子400外侧。定子300可以包括定子芯310、线圈320和绝缘体330。绝缘体330安装在定子芯310上。在这种情况下,线圈320绕绝缘体330卷绕。在这种情况下,绝缘体330设置在定子芯310与线圈320之间以使定子芯310与线圈320绝缘。
45.产生旋转磁场的线圈320可以绕定子芯310卷绕。
46.定子芯310可以以多个薄钢板堆叠的形式形成,但是本发明不必限于此。例如,定子芯310也可以形成为一个单个单元。此外,定子芯310可以由沿周向方向设置的多个单元定子芯形成。转子400可以设置在定子300内侧。此外,轴500可以联接至中央部件。
47.轴500可以因轴承10而在壳体100中设置成能够旋转。此外,轴500可以随着转子400的旋转一起旋转。
48.图2是图示了图1中所示的转子的平面图。
49.参照图2,转子400可以包括转子芯410和磁体420。
50.转子芯410以可旋转的方式设置在形成在定子300的中央部处的筒形空间部分中。在这种情况下,转子芯410可以通过堆叠多个呈盘状的芯板411来形成。
51.可以在转子芯410中设置有多个槽袋410p。
52.槽袋410p可以具有外侧敞开的形状。槽袋410p在径向方向上的长度可以大于其在周向方向上的宽度。所述多个槽袋410p可以设置成在转子芯410的周向方向上彼此间隔预定距离。此外,所述多个槽袋410p可以绕转子芯410的中心沿径向方向设置。磁体420设置在槽袋410p中。
53.在这种情况下,磁体420包括稀土元素。磁体420可以是稀土磁体(例如,ndfeb(钕)磁体或smco(钐钴)磁体)。
54.图3是图示了将图2中所示的转子芯的芯板堆叠起来的状态的分解立体图,并且图4是图示了将图3中所示的转子芯的芯板堆叠起来的状态的立体图。
55.参照图3,在转子芯410中,所述多个芯板411形成为沿轴500的轴向方向堆叠。在这种情况下,芯板411由金属材料形成,使得在磁体420之间形成磁通路径。在这种情况下,可以在转子芯410外侧设置筒形非磁性构件。在这种情况下,可以不受限制地使用阻挡磁力的任何材料作为非磁性构件的材料。
56.芯板411包括中央部分4111和联接至中央部分4111的多个径向部分4112。在这种情况下,中央部分和所述多个径向部分4112可以形成为一体的或具有联接结构。
57.在中央部分4111中形成有供轴500插入其中的通孔。在这种情况下,通孔可以形成为较长的中空形状。中央部分4111的形成通孔的内壁可以是平坦表面,并且可以在内壁中形成有滚花形状,以便在通孔联接至轴500时增加关于轴500的固定力。
58.所述多个径向部分4112以径向形状连接至中央部分4111的外侧。所述多个径向部分4112中的每一者均包括槽袋410p。在这种情况下,所述多个径向部分4112中的每一者均包括形成槽袋410p的表面和形成阶状部的带台阶部分4113。带台阶部分4113设置成在径向方向上相比于槽袋410p更靠向外侧,并且当磁体220设置在槽袋410p中时,带台阶部分4113可以设置在磁体220外侧以防止磁体220与槽袋410p分离。在这种情况下,可以在带台阶部分4113之间注入模具。
59.芯板411的所述多个径向部分4112的带台阶部分4113可以具有各种形状。更具体地,所述多个径向部分4112可以包括具有不同形状的带台阶部分4113,并且在这种情况下,带台阶部分4113可以包括具有不同形状的第一带台阶部分4113a、第二带台阶部分4113b、第三带台阶部分4113c和第四带台阶部分4113d。
60.图5是图示了芯板的立体图,并且图6是图示了围绕槽袋的带台阶部分的放大侧视图。
61.参照图5和图6,在第一带台阶部分4113a中,设置在一侧的径向部分4112在径向方向上与槽袋410p重叠。在这种情况下,在第一带台阶部分4113a中,突出部4114从径向部分4112的一个表面4112a—其形成槽袋410p—突出,并且另一表面4112b的面向突出部4114的部分凹入,以形成凹入的阶状部4115。
62.在第二带台阶部分4113b中,两侧的径向部分4112在径向方向上均与槽袋410p重叠。在这种情况下,在第二带台阶部分4113b中,突出部4114可以从径向部分4112的一个表面和另一表面—该一个表面和另一表面形成槽袋410p—突出。
63.在第三带台阶部分4113c中,设置在另一侧的径向部分4112在径向方向上与槽袋410p重叠。在这种情况下,在第三带台阶部分4113c中,径向部分4112的一个表面4112a—其形成槽袋410p—可以凹入以形成凹入的阶状部4115,并且突出部4114可以从另一表面
4112b的面向凹入位置的部分突出。
64.在第四带台阶部分4113d中,径向部分4112在径向方向上不与槽袋410p重叠。在这种情况下,在第四带台阶部分4113d中,径向部分4112的一个表面4112a和另一表面4112b—该一个表面4112a和另一表面4112b形成槽袋410p—可以凹入。
65.一个芯板411可以包括第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d中的至少两者。一个芯板411可以包括第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d中的全部带台阶部分。此外,第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d可以沿周向方向交替地设置在一个芯板411中。在这种情况下,第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d的数量和顺序不受限制。然而,第一带台阶部分4113a和第三带台阶部分4113c设置成使得第二带台阶部分4113c或第四带台阶部分4113d在周向方向上插置于第一带台阶部分4113a与第三带台阶部分4113c之间。也就是说,第一带台阶部分4113a和第三带台阶部分4113c未设置成在周向方向上彼此相邻。
66.同时,第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d可以以预定的顺序重复设置。也就是说,第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d可以对称地设置在芯板411中。在这种情况下,由第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d形成的对称结构可以根据马达的极数和槽数而改变。
67.图7示出了说明根据马达的极数和槽数的振动方向的视图。
68.参照图7,图7a示出了8极9槽(8p9s)式马达的振动方向,图7b示出了10极12槽(10p12s)式马达的振动方向,图7c示出了6极9槽(6p9s)式马达的振动方向,并且图7d示出了8极12槽(8p12s)式马达的振动方向。
69.在10p12s式马达的情况下,由于马达的振动方向形成为以如图7b所示的椭圆形形状在两个方向上倾斜,因此芯板411的第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d可以以一定顺序设置成具有双向对称结构。
70.另外,在6p9s式马达的情况下,由于振动方向形成为以如图7c所示的三角形形状在三个方向上倾斜,因此芯板411的第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d可以以一定顺序设置成具有三向对称结构。
71.另外,在8p12s式马达的情况下,由于马达的振动方向形成为以菱形形状在四个方向上倾斜,因此芯板411的第一带台阶部分至第四带台阶部分4113a、4113b、4113c和4113d可以以一定顺序设置成具有四向对称结构。
72.以使所述多个芯板411相对于相邻的芯板411旋转预定角度的状态将所述多个芯板411堆叠起来。在这种情况下,在设置在芯板411中的槽袋的数量为n的情况下,芯板411可以在轴向方向上相对于堆叠在其上的另一芯板旋转360/n
°
。例如,在如图3所示的槽袋410p的数量为10的情况下,在轴向方向上以使芯板411中的每个芯板旋转36
°
的状态将芯板411堆叠起来。
73.在这种情况下,第一带台阶部分4113a和第三带台阶部分4113c可以设置成使得第二带台阶部分4113b或第四带台阶部分4113d在轴向方向上插置于第一带台阶部分4113a与第三带台阶部分4113c之间。也就是说,在一个槽袋410p中,第一带台阶部分4113a和第三带台阶部分4113c设置成在轴向方向上彼此不相邻。
74.图8是示出了根据常规轮辐型马达的如本发明的旋转角度的齿槽转矩值和根据该实施方式的马达的旋转角度的齿槽转矩值的曲线图。
75.参照图8的曲线图,常规轮辐型马达根据旋转角度的变化具有约
‑
20mnm至40mnm的齿槽转矩值。相反,根据本发明的实施方式的马达根据旋转角度的变化具有约
‑
10mnm至10mnm的齿槽转矩值。
76.也就是说,根据本发明的马达可以以各种方式实现与芯板的槽袋重叠的带台阶部分的形状,以在驱动具有高磁通密度的马达时减小齿槽转矩。另外,由于提供了偏斜角度的效果,因此可以降低制造转子时偏斜角度的成本,并且因此可以提供低成本且高效率的马达。
77.如上所述,已经参照附图描述了本发明的实施方式。
78.以上描述仅仅是描述本发明的技术范围的示例。本领域技术人员可以在不脱离本发明的精神和范围的情况下做出各种改变、修改和替换。因此,以上描述的和附图中公开的实施方式应当仅以描述性意义来考虑,而不是用于限制技术范围。本发明的技术范围不受实施方式和附图的限制。本发明的范围应当由所附权利要求来解释,并且包含落入所附权利要求的范围内的所有等同方案。
79.[附图标记]
[0080]
1:马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100:壳体
[0081]
200:盖
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300:定子
[0082]
310:定子芯
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320:线圈
[0083]
330:绝缘体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400:转子
[0084]
410:转子芯
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
410p:槽袋
[0085]
411:芯板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4111:中央部分
[0086]
4112:径向部分
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4113:带台阶部分
[0087]
4114:突出部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
420:磁体
[0088]
500:轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
600:汇流条
[0089]
700:传感器部分
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1