马达驱动装置以及马达驱动装置的控制方法与流程
1.本发明涉及马达驱动二惯性系统或二惯性系统以上的多惯性系统的系统,尤其涉及振动抑制。
背景技术:
2.考虑包括如下单元等的二惯性驱动系统或连结有多个负载的多惯性驱动系统:产生直流电压的机构,包括电池或交流电源和整流器(交流
‑
直流变换器)的组合;逆变器,将直流电压变换为交流电压并施加于马达(电动机);马达,将施加的电能变换为机械能而旋转;以及1个负载,通过轴等与马达连结。
3.在此,设为逆变器基于根据加速器、操作面板的操作而生成的转矩指令,生成使得马达能够以适当的转矩而运行的振幅、频率的交流电压并向马达施加该交流电压。具有这样的驱动系统的系统例如有电梯、机床。
4.在这样的经由轴的驱动系统中,在驱动了负载时,在轴上产生相对于扭力的反作用力,有时会激发共振。另外,有时惯性系统由于施加于负载的干扰分量而振动。对于该惯性系统的振动,已知通过控制方面的改进来进行应对的方法。
5.例如,在专利文献1所示的汽车用的振动抑制控制中,对基于马达轴换算得到的综合惯量的目标响应与检测马达角速度进行比较并反馈振动分量而进行振动抑制。
6.在专利文献2的变速器等测试装置用的振动抑制控制中,通过检测并反馈输出转矩来进行不依赖于马达转速的振动抑制。
7.在专利文献3的机床用的振动抑制控制中,通过比较马达与被驱动部的速度并反馈振动分量来进行振动抑制。
8.在专利文献4的多惯性系统的振动抑制控制中,通过使干扰观测器和共振比控制并存而达成简易的振动抑制控制。
9.在专利文献1的振动抑制控制中,为将应用对象限于汽车的讨论,未考虑惯性系统被输入高频干扰时的振动抑制控制对电流控制系统造成的影响。
10.在专利文献2的振动抑制控制中,需要输出转矩检测单元。电动机驱动系统中有很多不具备输出转矩检测单元,在应用于通常的电动机驱动系统时可能会产生设计变更、部件筹备的成本。
11.在专利文献3的振动抑制控制中,马达和被驱动部这两者需要速度检测器。与检测器为1个的情况相比,在检测器为两个的情况下,产生部件成本增高、故障风险增高的问题。
12.在专利文献4的振动抑制控制中,由于反馈低频分量,在稳态时振动抑制补偿后的转矩指令不收敛于来自速度控制的转矩指令。不适合于无论指令值的大小如何、无论有无干扰都想要将马达转矩控制到具体的值的情况。
13.根据以上所示的内容,存在如下技术课题:在马达驱动装置中,在稳态状态下能够收敛于从上级控制输入的转矩指令,低阶的模型能够简易地进行安装,使电流控制的稳定性提高。
14.现有技术文献
15.专利文献
16.专利文献1:日本特许第6243279号
17.专利文献2:日本特许第5037024号
18.专利文献3:日本特许第6412071号
19.专利文献4:日本特许第5329203号
技术实现要素:
20.本发明是鉴于上述以往的问题而研究出的,它的一个方案为通过连接于逆变器的马达来驱动1个或多个负载的马达驱动装置,其特征在于具备:速度控制部,基于检测马达角速度和速度指令来输出转矩指令;振动抑制控制部,从推定马达角速度中减去所述检测马达角速度来提取振动分量,使所述振动分量通过不补偿低频分量及高频分量的滤波器而反馈补偿转矩,对所述转矩指令加上所述补偿转矩来计算振动抑制转矩指令;以及电流控制部,基于检测马达相位、检测电流和所述振动抑制转矩指令来输出栅极信号;以及逆变器,基于所述栅极信号来控制开关元件,对所述马达输出电压。
21.另外,作为它的一个方案,其特征在于,所述振动抑制控制部具备:惯性系统模型块,对所述振动抑制转矩指令乘以惯性系统模型来计算所述推定马达角速度;减法部,从所述推定马达角速度中减去所述检测马达角速度;所述滤波器,输入所述减法部的输出而输出所述补偿转矩;以及加法部,对所述转矩指令加上所述补偿转矩而输出为所述振动抑制转矩指令。
22.另外,作为它的一个方案,其特征在于,将所述滤波器的传递系数设为以下的式(9)。
[0023][0024]
g
fb
:传递函数
[0025]
jr:内部模型惯量
[0026]
ζ
h
:抑制补偿的强度
[0027]
ω
h
:频带
[0028]
s:拉普拉斯算子。
[0029]
根据本发明,在马达驱动装置中,在稳态状态下能够收敛于从上级控制输入的转矩指令,低阶的模型能够简易地进行安装,能够使电流控制的稳定性提高。
附图说明
[0030]
图1为马达与负载的连接结构图。
[0031]
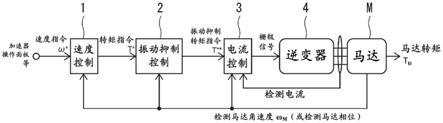
图2为实施方式的马达驱动装置的控制系统结构图。
[0032]
图3为实施方式的惯性系统框图。
[0033]
图4为实施方式的振动抑制控制部的结构图。
[0034]
图5为实施方式的阶跃响应图。
[0035]
图6为实施方式的波特图。
具体实施方式
[0036]
以下,基于图1~图6详细说明本发明的马达驱动装置的实施方式。
[0037]
[实施方式]
[0038]
图1中示出本实施方式的马达与负载的连接结构图。图1示出马达m经由轴而驱动3个负载a、b、c的4惯性驱动系统。设为4惯性驱动系统是为了作为多惯性系统控制的例子来进行说明,实施方式作为对象的不仅是4惯性系统。也就是说,负载的个数不限于3个,可以是1个以上的任意个数。马达转矩t
m
为通过用逆变器控制流过马达m的电流而产生的转矩,利用马达转矩t
m
来驱动马达m及负载a、b、c。以下,将图1的驱动系统称为设备(plant)。
[0039]
图2中示出本实施方式的控制系统结构图。对控制系统输入与加速器、操作面板等的操作量相对应的速度指令ω
*
。可以是在速度指令ω
*
之前有位置控制、然后生成速度指令ω
*
的结构。速度控制部1基于输入的速度指令ω
*
和检测马达角速度ω
m
输出用于跟随速度指令ω
*
的转矩指令t
*
。
[0040]
振动抑制控制部2是作为本实施方式的对象的控制部,根据输入的转矩指令t
*
和检测马达角速度ω
m
输出用于抑制振动的转矩指令(以下称为振动抑制转矩指令)t
**
。
[0041]
对电流控制部3输入振动抑制转矩指令t
**
和检测马达相位、检测电流,进行用于实现振动抑制转矩指令t
**
的电流控制运算,将栅极信号提供给逆变器4。
[0042]
在逆变器4中按照栅极信号进行开关,将电压施加于马达m。当对马达m施加了电压时电流流过,产生与速度、电流相对应的马达转矩t
m
。
[0043]
在此,在图2中使用检测马达角速度ω
m
及检测马达相位,但也可以通过电流控制等来运算推定马达相位,也就是说也可以设为无速度传感器。在该情况下,设为对速度控制部1、振动抑制控制部2输入推定出的马达角速度来代替检测马达角速度ω
m
。在本说明书中,设为检测马达角速度ω
m
包括推定出的马达角速度,设为检测马达相位包括推定马达相位。
[0044]
另外,关于以下的振动抑制控制的研究,电流控制假定为是足够准确的,视为与电流控制响应相同的时间常数的一阶滞后传递函数。
[0045]
图3为以框图的形式表示图1的图。j
m
、j
a
、j
b
、j
c
分别为马达m、负载a、负载b、负载c的惯量。另外,d
ma
、d
ab
、d
bc
为表达连接马达m与负载a、连接负载a与负载b、连接负载b与负载c的轴的损耗的衰减常数,k
ma
、k
ab
、k
bc
为连接马达m与负载a、连接负载a与负载b、连接负载b与负载c的轴的刚性。所谓轴的损耗表示与轴扭转的角速度相应地产生的摩擦等分量。
[0046]
使用了1/j
m
s等这种惯量的块7、11、15、18表示从转矩到角速度的传递函数。使用了d
ma
s+k
ma
/s等这种轴系数的块9、13、17表示从角速度到转矩的传递函数。
[0047]
使用了轴系数的传递函数的块9、13、17之前的基于反馈的减法器8、12、16用于根据两个角速度之差导出轴扭转的角速度。使用了马达m或负载a、b、c的惯量的传递函数的块7、11、15、18之前的基于反馈的减法器6、10、14表达来自轴的反作用力。
[0048]
基于图3具体地进行说明。在减法部5,从马达转矩t
m
中减去干扰转矩t
dis
。在减法部6,从减法部5的输出中减去第1轴块9的输出。
[0049]
在马达惯量块7中,对减法部6的输出乘以马达惯量传递函数1/j
m
s来计算检测马
达角速度ω
m
。在减法部8,从检测马达角速度ω
m
中减去第1负载惯量块11的输出。在第1轴块9,对减法部8的输出乘以第1轴传递函数d
ma
s+k
ma
/s。
[0050]
在减法部10,从第1轴块9的输出中减去第2轴块13的输出。在第1负载惯量块11,对减法部10的输出乘以第1负载传递函数1/j
a
s。在减法部12,从第1负载惯量块11的输出中减去第2负载惯量块15的输出。
[0051]
在第2轴块13,对减法部12的输出乘以第2轴传递函数d
ab
s+k
ab
/s。在减法部14,从第2轴块13的输出中减去第3轴块17的输出。在第2负载惯量块15,对减法部14的输出乘以第2负载传递函数1/j
b
s。在减法部16,从第2负载惯量块15的输出中减去第3负载惯量块18的输出。
[0052]
在第3轴块17,对减法部16的输出乘以第3轴传递函数d
bc
s+k
bc
/s。在第3负载惯量块18,对第3轴块17的输出乘以第3负载传递函数1/j
c
s。
[0053]
虽然在图3中示出了负载为3个的情况,但是负载只要为1个以上即可。在负载为1个的情况下,设备传递函数g
p
为减法部6~第1负载惯量块11为止的块(其中没有减法部10)。在负载为两个的情况下,为减法部6~第2负载惯量块15为止的块(其中没有减法部14)。在负载为4个以上的情况下,对图3追加所需的块即可。
[0054]
当输入了马达转矩t
m
以及干扰转矩t
dis
时,马达m、负载a、b、c基于图3被驱动。马达角速度被检测,并作为检测马达角速度ω
m
在图2的控制系统中被使用。将马达转矩t
m
、干扰转矩t
dis
的减法以后称为从设备输入转矩到检测马达角速度ω
m
为止的设备传递函数g
p
。但是,设备不需要如图3那样为线性传递函数的组合、即被汇总为1个设备传递函数g
p
那样的构成,即使在为具有齿轮的齿隙等非线性要素的设备的情况下也能够应用本实施方式。
[0055]
图4中示出振动抑制控制部2的结构图。g
p
为图3所示的设备传递函数。设备传递函数g
p
为图2的振动抑制控制部2的外部的项,为了振动抑制控制整体的易懂性而记载。
[0056]
本实施方式针对共振的模型设置检测单元,与具有共振以外的分量的控制内运算结果相比较而反馈于输出。这是控制的基本思路。表达共振以外的分量的模型是指粗略表示惯性系统整体的模型,这是以惯性系统的全部惯量之和作为时间常数的一阶滞后。
[0057]
对振动抑制控制部2输入转矩指令t
*
。利用加法器19将转矩指令t
*
与被反馈的补偿转矩t
fb
相加来计算振动抑制转矩指令t
**
。
[0058]
惯性系统模型块20对振动抑制转矩指令t
**
乘以控制内部的惯性系统模型(1/j
r
s)来计算推定马达角速度ω
est
。在此,j
r
为内部模型惯量。另外,振动抑制转矩指令t
**
经由电流控制系统(在此视为时间常数小的一阶滞后并省略)而成为马达转矩t
m
。在减法器5,从马达转矩t
m
中减去干扰转矩t
dis
,并被输入至设备传递函数g
p
。设备传递函数g
p
的输出为检测马达角速度ω
m
。
[0059]
在减法部21,从推定马达角速度ω
est
中减去检测马达角速度ω
m
。也就是说,对来自内部模型和设备的检测值进行比较。减法得到的结果经由滤波器22(传递函数g
fb
)而作为振动抑制用的补偿转矩t
fb
与转矩指令t
*
相加。
[0060]
在此,设为图2的速度控制、电流控制无特殊问题地工作,仅考虑振动抑制控制。
[0061]
说明本实施方式的振动抑制控制(图4)的基本思路。来自设备的检测马达角速度ω
m
由于设备的刚性而振动。与之相对,内部模型仅以考虑了惯量的积分来被表达,据此得到的推定马达角速度ω
est
不具有振动分量。也就是说,如果内部模型合适,则通过比较检测
马达角速度ω
m
与推定马达角速度ω
est
,能够仅抽出检测马达角速度ω
m
的振动分量。然后使得到的振动分量通过合适的滤波器(传递函数g
fb
)并反馈于转矩指令t
*
,从而能够抑制检测马达角速度ω
m
的振动。以上为基本的振动抑制的思路。
[0062]
使用数学式说明基于图4的结构的振动抑制控制。在此假定能够将电流控制系统视为时间常数小的一阶滞后,振动抑制转矩指令t
**
与马达转矩t
m
相等。另外,将设备的马达角速度视为无延迟地准确检测的值。
[0063]
首先,对控制内部的惯性系统模型进行描述。如上所述,由于想要比较检测马达角速度ω
m
与推定马达角速度ω
est
来抽出振动分量,因此推定马达角速度ω
est
只要是模拟了马达角速度的粗略动态即可。
[0064]
因而,由于模拟对马达m连结有负载a、b、c的情况,因此将内部模型惯量j
r
调整为惯量j
m
以上的值以便易于进行振动抑制。作为惯量的信息在事先已知时的优选值,如以下的式(1)那样将内部模型惯量jr设为马达m及全部负载a、b、c的惯量的总和。
[0065]
在此作为注意点的是,在经由齿轮等来传递力的情况、将车轮等旋转力变换为前后运动的情况下,从马达m观察的各负载a、b、c的惯量与单独测定的惯量看起来不同,因此原样根据式(1)的话推定马达角速度ω
est
偏离检测马达角速度ω
m
。在这样的情况下,使用齿轮比、旋转半径来将各负载的惯量换算到马达轴并取总和即可。
[0066]
[数学式1]
[0067]
j
r
=j
m
+j
a
+j
b
+j
c
ꢀꢀ
(1)
[0068]
接下来,对滤波器(传递函数g
fb
)的设计进行描述。从转矩指令t
*
及干扰转矩t
dis
到马达转矩t
m
的传递函数为以下的式(2)。从转矩指令t
*
及干扰转矩t
dis
至检测马达角速度ω
m
为止的传递函数如以下的式(3)。
[0069]
[数学式2]
[0070][0071]
[数学式3]
[0072][0073]
在此,将设备传递函数g
p
用分子g
pn
、分母g
pd
来表达。进而,考虑抑制检测马达角速度ω
m
的振动,将式(3)中的转矩指令t
*
的系数部分设为g
x
。于是为如以下的式(4)、式(5)。
[0074]
[数学式4]
[0075][0076]
[数学式5]
[0077]
[0078]
关注能够设计的传递函数1/j
r
s、g
fb
,用以下的式(6)进行替换,重新整理式(5),可以得到以下的式(7)。
[0079]
[数学式6]
[0080][0081]
[数学式7]
[0082][0083]
当关注式(7)的分母时,可知形成为能够通过g
h
来抑制设备传递函数g
p
的分母g
pd
引起的共振的形式。
[0084]
在此,在本实施方式的振动抑制中,采用重视以下两点、不进行低频分量、高频分量的补偿的设计。
[0085]
·
在无振动的情况下,不使转矩指令t
*
的值变化,即不进行稳态的补偿。
[0086]
·
不进行需要考虑与电流控制响应的均衡的补偿。
[0087]
根据式(3)、式(6),检测马达角速度ω
m
对于干扰转矩t
dis
的响应为g
x
·
g
h
,据此,将g
h
设定为如式(8)那样的陷波滤波器。ω
h
决定频带,ζ
h
决定抑制补偿的强度。
[0088]
与设备相配合地以能够抑制振动的方式调节频带ω
h
、抑制补偿的强度ζ
h
,通常而言,将频带ω
h
设定得低于设备传递函数g
p
的反共振点,如果抑制补偿的强度ζ
h
小则振动抑制性能弱,如果抑制补偿的强度ζ
h
大则产生陡峭的补偿转矩t
fb
,因此最好设定为约0.2<ζ
h
<0.8。
[0089]
[数学式8]
[0090][0091]
关于振动抑制控制中使用的滤波器(传递函数g
fb
),根据式(8)能够导出以下的式(9)。
[0092]
[数学式9]
[0093][0094]
以上为本实施方式的振动抑制控制的说明。利用仿真确认了本实施方式的效果。图5中示出针对阶跃响应的仿真结果。图5的左侧示出使转矩指令t
*
变化的情况,右侧示出使干扰转矩t
dis
变化的情况。可知不论在使转矩指令t
*
、干扰转矩t
dis
中的哪个变化的情况下,检测马达角速度ω
m
的振动都被抑制。可知无论哪个的结果都是转矩指令t
*
和振动抑制转矩指令t
**
、在此也就是马达转矩t
m
最终收敛于相同值。
[0095]
因而,可知本实施方式的振动抑制在达到作为目的的“在无振动的情况下不使转
矩指令t
*
的值变化”的同时能够抑制多惯性系统的振动。干扰转矩响应中的角速度的上升程度的偏差是由于仅在有控制的情况下产生与振动抑制的量相应的抵消干扰的转矩。
[0096]
图6中示出波特图。由于为4惯性系统,因此在无振动抑制控制时存在3个共振点。然后,在进行振动抑制的情况下,能够对于针对转矩指令t
*
的响应、针对干扰转矩t
dis
的响应这两者抑制共振点的增益。
[0097]
对本实施方式的特点进行研究。
[0098]
第1个特点是稳态特性。在进行了振动抑制后的稳态状态下,振动抑制转矩指令t
**
与转矩指令t
*
相等。这在无论有无干扰都想要输出特定的马达转矩t
m
的情况下是有利的。
[0099]
第2个特点是内部模型的阶数。通常,如果试图用内部模型来再现多惯性系统的共振,则传递函数的阶数变高,其系数也因项不同而大不相同,因此安装时需要注意小数点位置、运算误差。但是,本实施方式的内部模型1/j
r
s的阶数低,能够减少安装方面的难点。
[0100]
第3个特点是高频干扰的考虑。如果是补偿高频干扰的振动抑制控制的设计,则补偿转矩在高频下发生变动,存在使电流控制不稳定的危险性。对此,本实施方式以式(8)的方式来设定有助于干扰响应的g
h
,使得不对高频进行补偿,从而确保稳定性。
[0101]
以上为本实施方式的特点。
[0102]
以下说明本实施方式的效果。
[0103]
在从振动的检测马达角速度ω
m
中减去不具有振动分量的推定马达角速度ω
est
之后,使之通过不补偿低频、高频的滤波器来进行反馈,从而在稳态状态下能够收敛于从上级控制输入的转矩指令t
*
,能够以低阶的模型简易地进行安装,能够进行难以使电流控制不稳定的、多惯性系统的振动抑制控制。
[0104]
以往,有时连由轴刚性引起的共振也用模型来表达以进行汽车的减振控制。这能够以前馈方式无过冲地进行控制,但模型精度很重要。
[0105]
将车辆模型设为离散传递函数时的共振(刚性)的表达项与除此以外的项相比非常微小,不过当将其视为0来近似时,共振的表达全部消失而无法进行减振。因而,以往为了表达共振,专注于减振控制进行应对。
[0106]
本实施方式的控制不进行共振的表达,能够用容易的传递函数表达来进行减振控制。
[0107]
相对于专利文献1~4具有以下优点:不需要考虑了惯性系统被输入高频干扰时对电流控制系统造成的影响的输出转矩检测单元,针对马达最多仅1个速度检测器即可,在稳态时振动抑制后转矩指令收敛于来自速度控制的转矩指令。
[0108]
以上,在本发明中仅针对记载的具体例详细地进行了说明,但对本领域技术人员而言在本发明的技术构思的范围内能够进行多种变形及修改是显而易见的,这样的变形及修改当然属于权利要求的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1