具有电机和由电机驱动的摆式减速器的驱动装置的制作方法
1.本发明涉及一种驱动装置,其具有电机和由电机驱动的摆式减速器/摆线针轮减速机/摆线式减速器。
背景技术:
2.由文献de 10 2017 011 240 a1已知一种具有摆式减速器的驱动装置,该驱动装置由电机通过圆柱齿轮级驱动并且具有环形盘。
3.由文献de 10 2017 011 240 a1已知一种具有摆式减速器的驱动装置,该驱动装置由电机通过圆柱齿轮级驱动并且具有环形盘。
4.由文献ep 1 934 082 b1作为最接近的现有技术已知一种具有备用模式的叠加转向装置。
5.由文献us 3 525 890 a已知一种摆式减速器。
6.由文献de 10 2009 002 067 a1已知一种摆轮式沃尔夫罗姆传动装置(taumelradwolfromgetriebe)。
7.由文献de 11 2016 000 998 t5已知一种减速装置。
8.由文献ep 1 525 445 b1已知一种不平衡测量设备。
9.由文献de 2007 016 255 b4已知一种离心泵。
10.由文献de 10 2004 002 696 a1已知一种用于电子电路的壳体。
11.由文献de 199 34 161 a1已知一种摆轮式减速器。
技术实现要素:
12.因此,本发明的目的在于,改进一种驱动装置,其具有电机和由该电机驱动的摆式减速器,其中,希望该驱动装置能紧凑地构造。
13.根据本发明,该目的通过一种根据在权利要求1中说明的特征的驱动装置实现。
14.在驱动装置方面,本发明的重要特征是,驱动装置具有电机和由该电机驱动的摆式减速器,
15.其中,电机具有定子绕组和能相对于定子绕组围绕转动轴线转动的主动部件,
16.尤其是其中,主动部件具有永磁体,尤其是永磁体在与定子绕组相互作用时产生转矩,尤其是其中,永磁体沿周向方向具有交替的磁化方向,
17.主动部件与摆式减速器的输入部件、尤其是环形盘以不能相对转动的方式连接,
18.尤其是其中,输入部件通过至少一个摆轮与输出齿轮相互作用。
19.其优点在于,电机集成到减速器中,因为主动部件直接与摆式减速器的环形盘连接。因此,不需要通过传动级进行驱动。也取消了否则对于电机来说必要的支承结构。因为在本发明中的减速器输入部件作为电机部件运行。
20.在一有利的设计方案中,所述输入部件是环形盘,
21.环形盘在第一径向范围内具有在以转动轴线为基准的周向方向上变化的轴向壁
厚,
22.尤其是其中,在第一径向范围中,环形盘的轴向壁厚与以转动轴线为基准的圆周角相关,尤其并非存在恒定的关系、而是存在正弦关系。其优点在于,通过环形盘的沿周向方向变化的轴向壁厚能引起摆轮的摆动运动。
23.在一有利的设计方案中,第一摆轮在第一径向范围中通过支承装置支承在环形盘上并且在其背离主动部件的一侧上具有平齿部,该平齿部与摆式减速器的输出齿轮的平齿部啮合,
24.其中,输出齿轮以不能相对转动的方式与滚子或与输出轴连接,
25.尤其是其中,第一摆轮是环形的,
26.尤其是其中,支承装置是带有径向取向的滚针的滚针轴承。其优点在于,支承装置用于摆轮沿周向方向的相对转动运动。因此能降低摩擦。
27.在一有利的设计方案中,环形盘在第二径向范围中具有在以转动轴线为基准的周向方向上变化的轴向壁厚,
28.和/或其中,在第二径向范围中,环形盘的轴向壁厚与以转动轴线为基准的圆周角相关,尤其并非存在恒定的关系(即壁厚相对于圆周角是恒定的)、而是存在正弦关系(即壁厚相对于圆周角以正弦形式变化),其中,该正弦关系相对于在第一径向范围中的正弦关系在周向方向上偏移180
°
。其优点在于,在第二径向范围处可运行错开180
°
地工作的摆轮,从而可减小不平衡,即改善减速器的运转平稳性。
29.在一有利的设计方案中,第二摆轮在第二径向范围中通过第二支承装置支承在环形盘上并且在其背离主动部件的一侧具有平齿部,该平齿部与摆式减速器的输出齿轮的平齿部啮合,
30.尤其是其中,第二摆轮是环形的,
31.其中,第二径向范围在径向上与第一径向范围间隔开并且位于第一径向范围内侧。其优点在于,第二摆轮提高了运转平稳性。优选地,第二摆轮虽然沿径向的延展尺寸比第一摆轮小,但具有更大的质量,从而使得惯性矩等于第一摆轮的惯性矩。
32.在一有利的设计方案中,定子绕组通过第一压电元件和第二压电元件固定在驱动装置的壳体件上,
33.和/或,
34.定子绕组设置在电路板上,尤其是其中,定子绕组固定在电路板上,所述电路板通过第一压电元件和第二压电元件固定在驱动装置的壳体件上。其优点在于,借助于由压电元件强制产生的力传导可以检测所传导的力,并且可以由力或者说由力的变化历程来确定轴向力、反作用力矩和转速。
35.在一有利的设计方案中,借助布置在电路板上的评估单元,能由在压电元件上检测到的电压确定出转矩、轴向力和/或转速。其优点在于,能够以简单的方式确定这些物理参量的值。
36.在一有利的设计方案中,在电路板和壳体件之间布置有导热元件。其优点在于,由定子绕组产生的损耗热可以被有效地排出,因此也可以保护压电元件免受过高的温度。通过这种方式,可以降低在确定参量时的误差。
37.在一有利的设计方案中,第一压电元件布置在第一径向距离处,
38.其中,第二压电元件布置在第二径向距离处,
39.其中,沿径向在第一径向距离与第二径向距离之间和/或沿径向在第一压电元件与第二压电元件之间布置有导热元件。其优点在于,因此以中间布置的方式能够实现不受干扰的参量检测。
40.在一有利的设计方案中,导热元件不仅接触电路板、而且接触壳体件,
41.其中,从电路板经由导热元件传导至壳体件的力为从电路板经由第一压电元件和第二压电元件传导至壳体件的力、尤其是分别传导的力的十分之一以下。其优点在于,可以基本上不受干扰地实施对参量的检测。
42.在一有利的设计方案中,作为导热元件使用硅橡胶,该硅橡胶具有纤维基质并具有至少一种电绝缘的、但是导热良好的填充材料,尤其是氮化硼、石墨烯或富勒烯,
43.尤其是其中,导热元件被实施为填料或半成品。其优点在于,提供特别好的导热能力,尽管在电路板和壳体件之间存在接触的中间布置,但是在检测参量时不会导致明显的恶化。
44.在一有利的设计方案中,在电路板上布置有传感器、特别是霍尔传感器,该传感器与固定在主动部件或环形盘上的发送器、尤其是永磁体相互作用,尤其是用于确定环形盘的转速,
45.尤其是其中,由布置在电路板上的评估单元能够监控所确定的环形盘转速是否超过不允许的偏差程度。其优点在于,能够以简单的方式检测转速,即通过探测在磁场敏感的传感器旁转动经过的永磁体。由此也优选可以提高在检测转速时的可靠性。
46.在一有利的设计方案中,定子绕组由布置在所述电路板上的逆变器馈电。其优点在于,在驱动装置中可以在电路板上设置控制转速的电子装置。该电子装置的损耗热,也就是逆变器的损耗热,能通过导热元件引导到壳体件上。
47.在一有利的设计方案中,由两个摆轮分别在轴向方向上覆盖的区域与由定子绕组在轴向方向上覆盖的区域间隔开,
48.其中,被定子绕组覆盖的径向范围包括被第一摆轮和/或第二摆轮覆盖的径向范围。其优点在于,电机在摆式减速器上可布置在b侧。
49.在一有利的设计方案中,由定子绕组沿轴向覆盖的区域包括由两个摆轮分别沿轴向覆盖的区域,
50.其中,被定子绕组覆盖的径向范围与被第一摆轮和/或第二摆轮覆盖的径向范围间隔开,
51.尤其是其中,被定子绕组覆盖的径向范围在径向上布置在被第一摆轮和/或第二摆轮覆盖的径向范围的内侧或外侧。其优点在于,在沿径向布置在外侧的情况下,能够借助定子绕组在低电流下产生高转矩。
52.其它优点由从属权利要求得出。本发明不限于权利要求的特征组合。对于本领域技术人员,特别是从目的提出和/或通过与现有技术比较而提出的目的中,得到权利要求和/或单个权利要求特征和/或说明书特征和/或附图特征的其他有意义的组合可能性。
附图说明
53.现在借助于示意图详细解释本发明:
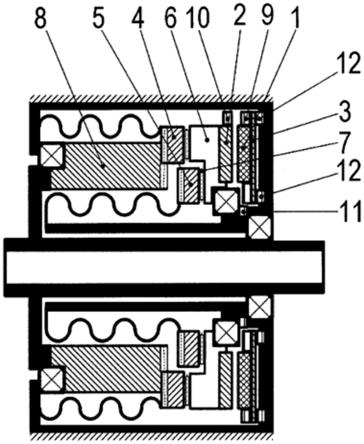
54.图1示出了具有由布置在b侧的电机驱动的作为内转子的摆式减速器的驱动装置。
55.图2示出了电机在减速器侧面的布置,电机沿径向布置在减速器的外侧。
56.图3示出了电机沿径向布置在减速器内。
57.图4示出了实施为外转子装置的驱动装置,其中电机布置在减速器的b侧。
58.图5示出了实施为外转子装置的驱动装置,其中电机沿径向布置在减速器内。
59.图6示出了实施为外转子装置的驱动装置,其中,电机布置在减速器侧面,但是沿径向布置在减速器内侧。
具体实施方式
60.如图1所示,驱动装置具有齿轮8,该齿轮与输出轴以不能相对转动的方式连接,该输出轴尤其是相对于驱动装置的壳体件可转动地支承。
61.电路板3在其第一侧、尤其是下侧通过压电元件12支撑在壳体件上并且在其背离压电元件12的一侧支承定子绕组1。
62.主动部件2通过轴承以能够相对于壳体件转动的方式被支承。主动部件2例如具有永磁体,从而由定子绕组1和永磁体形成的电机构造为同步电机。
63.主动部件2在其背离定子绕组的一侧与曲面的环形盘6、尤其是正弦曲面的环形盘以不能相对转动的方式连接。
64.该环形盘6在第一径向范围中在其背离定子绕组1的一侧上具有支承装置7,从而第二摆轮5能相对于环形盘6转动地被支承,尤其是沿轴向方向被支承。
65.支承装置7贴靠在第二摆轮的光滑的接触面上。(第二)摆轮在其背离环形盘6的一侧具有平齿部,该平齿部根据环形盘6的转动运动不时地与输出齿轮8的齿部啮合,该输出齿轮布置在第二摆轮5的背离定子绕组的一侧。
66.曲面环形盘6、特别是正弦曲面环形盘6所具有的轴向壁厚沿周向方向按照与圆周角呈正弦的关系变化。
67.支承装置优选可通过滚针轴承实现,其中,滚针沿径向取向。
68.环形盘6在沿径向布置在第一径向范围外侧的第一径向范围中同样在其背离定子绕组1的一侧上具有支承装置,从而第一摆轮4以能相对于环形盘6转动的方式被支承,尤其是沿轴向方向被支承。
69.该支承装置贴靠在第一摆轮4的光滑的接触面上。第一摆轮4在其背离环形盘6的一侧上具有平齿部,该平齿部根据环形盘6的转动运动分时段地与输出齿轮8的齿部啮合,该输出齿轮布置在第一摆轮4的背离定子绕组的一侧上。
70.曲面环形盘6、特别是正弦曲面环形盘6——不仅在第一径向范围中而且在第二径向范围中——在周向方向上的轴向壁厚皆按照与圆周角呈正弦的关系变化。
71.第一摆轮4实施为平齿齿环。同样地,第二摆轮5实施成平齿齿环。
72.借助于布置在电路板3和壳体件之间的压电元件12确定沿周向方向指向的、在各个压电元件处作为剪力起作用的力,当主动部件2被置于转动运动中且被驱动时,该力作为反作用力由定子绕组1作用在壳体件上。
73.优选地,第一压电元件12布置在第一径向距离处,而第二压电元件12布置在第二径向距离处,该第二径向距离与第一径向距离间隔开。被定子绕组1覆盖的径向范围优选布
置在第一径向距离与第二径向距离之间。进一步优选地,第一压电元件12在周向方向上彼此有规律地、即均匀地间隔开。同样地,第二压电元件12在周向方向上彼此有规律地、即均匀地间隔开。
74.通过确定在各个压电元件12上由剪力产生的电压,也可以探测到相应的电压变化过程。
75.此外,在各个压电元件12处也可通过另外的电极确定轴向力、即沿主动部件2的转动轴线的方向的力分量。
76.电压变化曲线显示出与主动部件2的转动位置相关的值。
77.因此,由如此确定的电压和其变化曲线可确定反作用转矩、轴向力以及转速。
78.在电路板3上安装有起电子电路作用的器件。这包括用于评估电压变化过程的评估单元,特别是用于确定转矩、轴向力和转速。此外,电子电路包括用于给定子绕组供电的逆变器,该逆变器根据评估单元的输出信号给定子绕组1供电。
79.在电路板3和壳体件之间的中间区域中,尤其是也就是沿径向在第一径向距离和第二径向距离之间和/或也就是沿径向在第一压电元件12和第二压电元件12之间布置有导热元件。
80.在此,虽然导热元件既接触电路板3又接触壳体件,但是该导热元件由弹性材料制成,该弹性材料的弹性对剪力、轴向力和转速的确定仅存在轻微的影响。
81.优选地,使用硅橡胶作为导热元件,该硅橡胶具有纤维基质和至少一种电绝缘的、但是导热良好的填充材料,例如氮化硼、石墨烯或富勒烯。氮化硼在此能够特别简单地并且均匀地混入导热元件中。优选导热元件被实施为填料或半成品。
82.在电路板3上布置有传感器9、特别是霍尔传感器,该传感器探测固定在主动部件和/或环形盘6上的发送器10、特别是永磁体的转动经过,由此同样可以确定环形盘6的转速。因此,能够以冗余的、物理上各不相同的方式确定转速。通过监测两个确定的转速值这间的偏差是否超过不允许的偏差程度,可实现提高的可靠性。
83.与根据图1的实施方式不同,在根据图2的实施方式中,定子绕组沿侧向布置。在轴向方向上、即在输出轴的转动轴线的方向上由定子绕组1覆盖的轴向区域包括在轴向方向上由两个摆轮4、5覆盖的区域。
84.因此,可以从电机向主动部件2传递较大的转矩。
85.与图2不同,在根据图3的实施方案中,主动部件2和定子绕组1不是沿径向布置在两个摆轮4、5外侧,而是沿径向布置在两个摆轮4、5内侧。因此可提供紧凑的驱动装置。
86.与根据图1的实施方式不同,在根据图4的实施方式中,驱动装置可实施为外转子装置、尤其是辊子驱动装置。在此,电路板3通过压电元件12与壳体件连接,该壳体件与沿轴向居中穿过驱动装置的轴连接,该轴静止地布置,即直接或间接地固定在支架或壁上。
87.主动部件2又通过轴承相对于布置在电路板3上的定子绕组1可转动地支承。环形盘6又与主动部件2以不能相对转动的方式连接。借助又支承在环形盘6上的摆轮4和5,该摆轮的齿部与输出齿轮8的齿部啮合,其中输出齿轮8与可转动支承的滚子以不能相对转动的方式连接。该滚子以至少部分地构成壳体的方式包围摆轮4、5。在此,滚子不仅沿径向包围摆轮4、5,而且也沿径向包围输出齿轮8。此外,在轴向方向上被滚子覆盖的区域包括在轴向方向上被齿轮8和摆轮4、5覆盖的区域。优选地,在轴向方向上被滚子覆盖的区域包括在轴
向方向上被环形盘6覆盖的区域。
88.优选地,滚子由金属例如钢制成。进一步优选地,滚子在其外侧上至少部分地被涂有橡胶。因此,可以实现比光滑的、尤其是金属的面高的摩擦。压电传感器12和/或传感器9以对应的方式布置并且用于确定轴向力、转速和/或转矩。
89.与根据图4的实施方式不同,在根据图5的实施方式中,电机沿径向布置在摆轮4、5内侧,并且由定子绕组1沿轴向方向覆盖的区域包括由摆轮4、5以及尤其是也由齿轮8和/或由环形盘6沿轴向方向覆盖的区域。
90.在此,定子绕组1或者直接与在居中贯穿驱动装置的轴连接,或者通过布置在中间的压电元件12与该轴连接,从而在此也能够由所检测到的力来确定转矩。电路板3在此也布置在固定的壳体件上。为此,沿轴向方向被电路板3覆盖的轴向区域沿轴向方向与定子绕组1沿轴向方向覆盖的区域间隔开。
91.与根据图5的实施方式不同,在根据图6的实施方式中,电机沿径向布置在摆轮4、5外侧、但沿径向被滚子包围,即沿径向布置在滚子的最大径向距离内侧。
92.在此,不仅在电路板3和定子绕组1之间存在轴向间隔,而且也在电路板3与定子绕组1以及尤其是主动部件2之间存在径向间隔。
93.也可以在根据图6的实施方式中相应地布置压电元件,以便测量力以及确定转速和转矩。
94.附图标记列表:
95.1定子绕组
96.2主动部件、尤其是永磁体
97.3电路板
98.4第一摆轮
99.5第二摆轮
100.6曲面环形盘、尤其是正弦曲面环形盘
101.7支承装置
102.8齿轮、输出端
103.9传感器、尤其是霍尔传感器
104.10发送器、尤其是永磁体
105.11力传感器、尤其是轴向力传感器
106.12压电元件
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1