无源触觉接口的制作方法
1.本发明涉及无源触觉接口,即下述无源触觉接口:该无源触觉接口可以通过用户的手指或手、甚至可能通过脚来操纵,并且在没有能量消耗的情况下提供感觉到的可变应力。
2.本发明例如应用于办公自动化计算机控制接口或应用于机动车辆内部的控制接口或应用于家用电器的控制接口。
背景技术:
3.手动触觉装置是已知的,手动触觉装置使用固定部分与可动部分之间的磁性相互作用,这两个部分彼此相对并且各自包括磁体,或者一个部分包括磁体,而另一部分包括经切割的软铁磁元件以形成不同的磁极。
4.法国专利fr2908903描述了一种分度装置,该分度装置包括可动的控制部件,该可动的控制部件通过凹口器件被保持在至少一个分度位置中。该专利描述了不同的解决方案,始终提供:
5.a)具有突起部的金属元件,
6.b)磁体或两个磁体,每个磁体具有朝向金属元件定向的极和朝向与金属元件相反的侧部定向的第二极。
7.该解决方案有几个缺点。确保分度的磁性相互作用集中在一个齿(在一个磁体的情况下)或两个齿(在两个直径上相对的磁体的情况下)上,这意味着相当高的且局部化的吸引力。结果是差的转矩/磁体体积比。
8.另外,该专利提出的解决方案遇到了对用于小型化的可能性进行限制的尺寸的问题:当形成在金属元件上的突起部的数目变大时,需要减小磁体的截面或磁体对的截面,以便防止产生的磁场与几个相邻的突起部相互作用。然而,通过减小磁体的截面,转矩损失,并且分度阻力会减弱,直到分度阻力不再明显为止。分度的分辨率受到齿之间的间距的尺寸的限制,该间距必须大于磁体的尺寸。因此,这些实施方式不允许实现高分度的分辨率。
9.中国专利cn108400046也是已知的,该专利描述了一种下述装置:该装置由环形表面和交替地布置在环形表面上的几个静态磁体形成,并且在旋转部件上至少设置有2件相对的可动磁体。移动磁体和静态磁体依次布置以实现同极排斥和异极吸引。
10.该解决方案并不令人满意,因为该解决方案还具有很大的刚度和差的分辨率,这必然受限于磁体的间距。此外,该解决方案需要大量的磁体来产生大量的凹口。该解决方案也存在工业化困难,因为该解决方案需要小部件的复杂组装。
11.专利申请ep1167109描述了一种用于生成选择位置的装置,该装置包括至少一个基部本体,该基部本体至少部分地被壳体包围,该壳体承载盘状本体,该盘状本体借助于基本位置磁体布置相对于基部本体被保持,基本位置磁体布置将相对于基部本体移动,并且该装置还包括以下位置布置:至少盘状本体相对于壳体的位置将借助于该位置布置被确定。该装置包括至少一个定子本体,所述至少一个定子本体包括至少一个磁性元件和轴引
导凹部,基部本体包括中空转子本体和设置在轴引导凹部中的轴元件,该中空转子本体将相对于磁性元件移动并且中空转子本体包括至少一个位置指示器带齿环,该带齿环包括至少一个位置指示齿,并且在壳体中设置盘本体凹部。该实施方式仅允许中等分辨率,因为凹口的数目受限于齿的数目,齿可以制造、定相和与定子对准。
12.专利wo2013023922描述了一种控制装置,该控制装置包括具有触觉反馈的致动元件,该元件具有触敏控制表面,所述致动元件能够由操作者使用抓握构件致动。该装置包括第一平坦部件和第二平坦部件,第一平坦部件和第二平坦部件由铁磁材料制成并且定向成使得第一平坦部件和第二平坦部件的大表面彼此平行,第一平坦部件能够水平地相对于保持固定的第二平坦部件以引导的方式被平移地驱动,第一平坦部件形成控制元件或者将第一平坦部件的运动全部或部分地传递至控制元件。该装置还包括线圈或电导体,该线圈或电导体布置在平坦部件之间并且分配至第一极靴,该第一极靴连接至第二平坦部件并且从第一平坦部件突出。通过向线圈或导体施加电流,可以产生磁场,第一平坦部件可以通过该磁场相对于第二平坦部件从静止位置以水平平移的方式被驱动至移动位置。
13.该解决方案不是无源的,而是需要线圈的电源以为线圈供电。
14.jp2016170886描述了一种包括传感器的装置,该传感器包括第一元件和第二元件,第一元件由沿着周向方向以预定角度间隔的多个磁化部分形成,第二元件使用多个第一磁体。沿着周向方向在预定角度间隔处的第二磁化部分被定位成能够面向在周向方向上的外侧部上的磁化部分,并且基于旋转操作。
15.wo2020074605公开了一种用于机动车辆控制单元的磁性旋转致动器,该磁性旋转致动器具有固定部分和可以相对于固定部分旋转的旋转构件,磁性旋转致动器具有包括多个磁性锁定位置的磁性锁定感受部,并且固定部分和旋转构件各自包括相互配合以生成多个磁性制动位置的至少两个单独形成的磁性构件。对于每个凹口,仅一个转子磁体参与转矩;应力是不对称的,并且磁体的体积与产生的转矩之间的比很差。
16.在这些装置中,可以在可动元件的操纵期间给用户经过连续凹口的感觉,连续凹口的数目由件中的每个件上的磁极性的最高数目确定。这些凹口与固定部分与可动部分之间的各个稳定磁性位置对应。例如,在专利fr2908903中,如果铁磁部分包括16周期性样式并且磁化部分包括2个磁体,那么在可动部分的完整旋转过程中感觉到的凹口的数目为16。
17.当需要在可动部分的完整旋转内(或在给定角度或线性运动内)形成大量的凹口、例如72个凹口时,现有技术的这些装置具有需要大量磁体或铁磁极的缺点。当这种相对大量的凹口与小型化的需求相结合时,在工业规模上生产该解决方案的难度在小元件的情况下则变得明显,小元件难以通过要保持的一组严格公差来获得。
18.此外,在很多触觉装置中,通常需要施加位置传感器以便能够对装置的操作进行控制,比方说例如当触觉接口是鼠标时对计算机指针的运动进行控制、或对仪表板屏幕上的游标的运动进行控制,这些示例不是限制性的。现有技术的装置通常使用简单地放置在触觉装置附近的光学或磁性传感器,从而使得解决方案笨重或不经济。
技术实现要素:
19.本发明旨在通过允许无源磁化触觉接口的可动元件和固定元件的更经济的工业生产来克服现有技术的缺点,“无源”意味着在没有能量源的情况下获得触觉效果。
20.为此,本发明提出了通过将固定部分和可动部分相关联来产生被用户感觉到的确定数目的凹口,固定部分和可动部分各自都具有比感觉到的凹口数目更少的磁极,同时保持无源,也就是说,不使用电线圈且不消耗电能。
21.本发明的目的还提供一种简单且经济的解决方案,以便将位置传感器安装在触觉装置中。
22.更准确地,本发明涉及一种无源触觉接口,该无源触觉接口包括第一元件,该第一元件能够绕轴线以可旋转的方式运动或者能够沿着轴线以可平移的方式运动,第一可动元件与第二固定元件相对地旋转或移动,所述第一可动元件具有第一多个磁极,所述第一多个磁极以极距ps并且在运动的方向上周期性地间隔开,所述第二固定元件具有第二多个磁极,所述第二多个磁极以极距pr并且在运动的方向上周期性地间隔开,其中,ps和pr是不同的数目,通过在周期pt中所述第一可动元件与所述第二固定元件之间的磁性相互作用来产生周期性应力,其特征在于,ps和pr选择成使得pt严格地小于间距ps和pr中的最小者。
23.优选地,磁性元件包括单个磁体,该单个磁体具有周期性变化的磁化。
[0024]“多个磁极”是指具有规则且恒定分布的大于4个的很大数目。
[0025]
优选地,所述周期性应力的周期数目与所述第一可动元件处和所述第二固定元件处的磁极的周期数目的最小公倍数相等。
[0026]
在一变型中,所述第一可动元件或所述第二固定元件中的一者包括筒形永磁体,所述筒形永磁体具有交替的北极和南极,从而形成所述第一多个磁极,所述第一可动元件或所述第二固定元件中的另一者具有多个齿,所述多个齿通过环连接并且形成所述第二多个磁极,所述齿和环由软铁磁材料制成,所述磁性相互作用的周期pt比间距ps和间距pr中的最小者小至少两倍。实际上,在闭合旋转的实施方式的情况下,ps和pr之间的最小公倍数对应于下述值:该值比磁极总数目大至少两倍。
[0027]
在另一变型中,所述第一可动元件和所述第二固定元件包括永磁体,所述永磁体具有交替的北极和南极,从而形成所述极距ps和极距pr。
[0028]
替代性地,第二固定元件包括具有沿着所述轴线定向的单向磁化的磁体,并且第二固定元件在轴向上的两个侧部上包括由软铁制成的两个铁磁盘(7a、7b),这两个铁磁盘(7a、7b)径向地延伸并且各自由多个2π/ps周期性的齿(42)延伸,所述多个2π/ps周期性的齿(42)由以弧度表示的所述极距ps间隔开。
[0029]
根据一变型,第二固定元件包括具有沿所述轴线定向的单向磁化的磁体,并且第二固定元件在轴向上的在两个侧部上包括由软铁制成的两个铁磁盘(7a、7b),这两个铁磁盘(7a、7b)径向地延伸并且各自由多个2π/(2*ps)周期性的齿延伸,所述多个2π/(2*ps)周期性的齿以所述极距ps乘以2间隔开并且在每个盘之间间隔了以弧度表示的所述极距ps。
[0030]
根据另一变型,第一可动元件包括轴向地位于单极永磁体的两个侧部的两个盘,并且第二固定元件包括由软铁磁材料制成的盘,所述盘各自分别由齿径向地延伸,所述齿径向地面向彼此并且以所述间距ps间隔开。
[0031]
本发明还涉及一种线性无源触觉接口,其特征在于,所述第一可动元件包括永磁体,所述永磁体横向于所述第一可动元件沿着所述轴线的运动被磁化并且横向地定位在具有齿的由软铁磁材料制成的两个带齿元件之间,并且第二固定元件由铁磁材料制成,第二固定元件包括形成杆的齿并且线性地延伸,所述第一固定元件在第二固定元件的上方线性
地移动。
[0032]
本发明还涉及一种球形无源触觉接口,其特征在于,所述第一可动元件包括能够绕三个正交轴线以旋转的方式移动的球形接头,所述球形接头包括径向延伸的一组齿,并且第二固定元件由位于分离的永磁体的两个侧部上的呈软铁磁材料的堆叠片的形式的多个固定元件形成,分离的永磁体定向成垂直于所述片,所述片由面向所述球形接头的齿径向地延伸。
[0033]
本发明的目的还在于允许触觉接口的经济生产。本发明特别涉及一种旋转触觉接口,第一可动元件包括永磁体的环,该永磁体的环轴向地延伸成紧固至盘部分,所述盘部分在与所述磁体相反的方向上由磁性板轴向地延伸,磁性板用于所述第一可动元件的位置检测,并且所述第二固定元件包括由软铁磁材料制成的环,该环由面向所述永磁体的环的齿延伸。
[0034]
根据一变型,所述磁体的环、所述盘部分和所述磁性板由具有注射塑料粘合剂的单一材料制成,该材料可以使自身永久地磁化。
[0035]
在另一变型中,所述盘部分由注射的塑料粘合剂材料制成,所述磁性板牢固地固定在该盘部分上。
[0036]
最后,所述板可以由注射到所述盘部分中的塑料粘合剂材料制成。
附图说明
[0037]
本发明的其他特征和优点将在参照附图阅读以下详细实施方式时变得清楚,这些附图分别示出了:
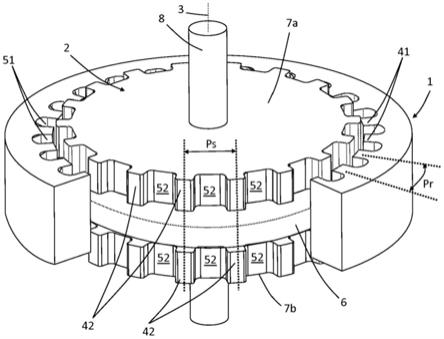
[0038]-图1,根据本发明的第一实施方式的装置的局部截面图;
[0039]-图2,根据本发明的第二实施方式的装置的局部截面图;
[0040]-图3,根据本发明的第三实施方式的装置的立体图;
[0041]-图4,根据本发明的第四实施方式的装置的局部截面图;
[0042]-图5,根据本发明的第五实施方式的装置的立体图;
[0043]-图6,根据本发明的第六实施方式的装置的立体图;
[0044]-图7,根据本发明的第七实施方式的装置的立体图;
[0045]-图8,根据本发明的第八实施方式的装置的立体图;
[0046]-图9,根据本发明的第九实施方式的装置的立体图;
[0047]-图10,根据本发明的根据图9中的替代实施方式的装置的立体图;
[0048]-图11,根据本发明的线性变型的装置的立体图;
[0049]-图12,本发明的球状变型实施方式的立体图,
[0050]-图13a和图13b,根据本发明的装置的相同替代实施方式的两个视图,
[0051]-图14a和图14b,根据本发明的装置的相同的另一替代实施方式的两个视图,
[0052]-图15,图4的另一旋转变型,
[0053]-图16,使用两个永磁体的旋转变型。
具体实施方式
[0054]
图1示出了根据本发明的旋转触觉接口的第一实施方式。该旋转触觉接口包括此
处呈环的形式的第一可动元件(1),该第一可动元件(1)的外表面是筒形的并且可以可选地具有纹理(此处不可见)以改善用户的抓握致动或手指致动。该可动元件(1)的内表面具有相对于旋转轴线(3)径向定向的一系列齿(41)和凹口(51),从而限定极距pr。该第一可动元件(1)由软铁磁材料、例如钢或铁合金制成。第二固定元件(2)定位在该第一可动元件(1)的内部并且径向地面向第一可动元件(1)。该第二固定元件包括呈盘的形式的永磁体(6),永磁体(6)的磁化是轴向定向的。在该磁体(6)的两个侧部上轴向地定位有由软铁制成的两个铁磁盘(7a、7b),两个铁磁盘(7a、7b)各自由多个2π/ps的周期性的齿(42)和尽可能多的凹口(52)径向地延伸,周期性的齿(42)以极距ps间隔开,其中,ps以弧度表示。齿(42)在第一可动元件(1)的方向上径向地延伸。盘(7a、7b)以及磁体(6)此处紧固至轴(8),该轴(8)用于定位和引导第一元件(1)和第二元件(2),该轴(8)沿着旋转轴线(3)延伸。
[0055]
在该示例中,盘(7a、7b)各自具有18个齿(42),一个盘(7a)的每个齿关于磁体(6)的横向中间平面对称地与另一盘(7b)的齿径向地对准。第一可动元件(1)具有一组24个齿(41),由于在第一可动元件(1)上进行的局部切割,这些齿中的一部分齿不可见。由于永磁体(6)的磁通量穿过所有齿(41、42),所有齿(41、42)形成彼此吸引的磁极,以便在齿(41)与齿(42)之间使通过第一可动元件(1)与第二固定元件(2)之间的空气间隙的总磁通量最大化。因此,以连续凹口的形式形成了一组稳定和不稳定的位置以及激活第一可动元件(1)的用户可以感觉到的周期性应力。由于第一可动元件(1)与第二固定元件(2)之间的齿(41、42)的不同数目,然后可以感觉到的凹口的数目与第一可动元件(1)的磁极和第二固定元件(2)的磁极的两个数目的最小公倍数(lcm)相等。在该示例中,感觉到的凹口的数目将是72,18和24的最小公倍数(lcm 18and 24)。用户创建和感觉到的转矩的幅度也可以通过第一元件(1)和第二元件(2)的轴向尺寸以及第一可动部分(1)与第二固定部分(2)之间的空气间隙进行调节。齿(41、42)的形状也可以影响(play on)这个参数以及周期内获得的转矩的形状。
[0056]
图2示出了图1的替代实施方式,其中,仅盘(7a,7b)不同。这些盘中的每个盘具有8个齿(42),每个盘(7a、7b)的齿(42)在角度上异相半个周期,使得盘(7a)的齿(42)与盘(7b)的凹口(52)的中间对准,并且反之亦然。该变型可以使盘中的每个盘上要生产的齿的数目最小化,同时保持用户感觉到的凹口的数目相同、此处为72。然而,与图1中所示的第一实施方式相比,触觉感受的幅度在该情况下更低,由于产生了更大的磁阻。在该实施方式中,盘(7a、7b)各自由多个2π(2*ps)的周期性的齿径向地延伸,所述多个2π/(2*ps)周期性的齿以所述极距ps乘以2间隔开并且在每个盘之间间隔了以弧度表示的所述间距ps。
[0057]
图3示出了图1的替代实施方式,其中,磁体(6)的位置不同,此处磁体(6)在两个带齿盘(11a、11b)之间安装在第一可动元件(1)中。磁体(6)为轴向磁化环的形式。第二固定元件(2)为单个带齿盘(7)的形式。在该示例中,如在此处给出的所有示例中一样,最大数目的齿可以安装在第一可动元件(1)上或第二固定元件(2)上,而这不超出本发明的范围。同样,如在所示的其他实施方式中一样,轴(8)不是系统必需的或未示出。最后,对于旋转的实施方式,第一可动元件(1)可以安装在第二固定元件(2)的外部或内部。
[0058]
图4示出了一变型,其中,磁性相互作用通过第一可动元件(1)与第二固定元件(2)之间的径向空气间隙来执行。第二固定元件(2)具有环(12),该环(12)通过由软铁磁材料制成的一组齿(42)轴向地延伸,所述一组齿(42)径向地面向第一可动元件(1)处的磁体环
(16)。该第一可动元件(1)此处为一个且相同的部件的形式,该一个且相同的部件由可以使自身永久地磁化的可注射材料制成、比如具有塑料粘合剂的磁体。磁体环(16)因此由盘部分(13)径向地延伸,该盘部分(13)又由磁化板(14)轴向地延伸。该板(14)此处以非限制性方式具有两个轴向磁极(n、s)。这两个磁极(n、s)不是旨在与第二固定元件(2)的齿(42)磁性地配合,而是旨在当这些磁极(n、s)与例如霍尔探针或磁阻探针(此处未示出)相对时检测第一可动元件的位置。
[0059]
图4的这种解决方案对于生产经济的工业解决方案特别有利,特别是当以小尺寸(通常具有小于20mm的总直径)生产时。实际上,除了本发明提出的与使用不同数目的相对磁极以便产生由用户感觉到的更多数目的凹口从而有助于工业生产有关的主要优点外,以单件和以可以被磁化的材料制造第一可动元件(1)是特别实用和经济的,特别是考虑到实施位置传感器。该位置检测功能在触觉接口对计算机软件或车辆中的电气化功能进行控制时将是特别重要的。
[0060]
图5示出了轴向变型实施方式,也就是说,其中,第一可动元件(1)轴向地面向第二固定元件(2)。在该示例中并且更特别地,呈软铁磁材料的形式的第一可动元件(1)的齿(41)径向地延伸并且轴向地面向第二固定元件(2)的磁体环(6)。第一可动元件(1)具有9个齿(41),并且第二固定元件(2)具有带有12个南极和北极的磁体(6),以便形成36个感觉得到的凹口。此处的磁化方向是径向的或优选地是轴向的,这使得可以改变所感觉到的转矩的幅度。仍然在该示例中,第一可动元件(1)可以变为固定的并且第二固定元件(2)可以变为可动的,而这不改变所描述的一般功能。同样,在该示例中并且在该装置的中央,磁性板(14)被示出由北极(n)和南极(s)组成,北极(n)和南极(s)用于在该板(14)与磁敏探针(此处未示出)相对时检测两个元件(1和2)的相对位置。
[0061]
图6示出了图4中所示示例的替代方案,其中,第一可动元件(1)具有从板(11)轴向地延伸的齿(41),该组件由软铁磁材料制成。第二固定元件(2)具有磁性环(6),该磁性环(6)包括交替的北极和南极,所述交替的北极和南极径向地定向并且径向地面向齿(41)。第一可动元件(1)的旋转是绕轴(8)来执行的,轴(8)固定在支承件(17)中或在该支承件(17)中滑动。
[0062]
图7是替代实施方式,其中,第一可动元件(1)为铁磁环(18)的形式,铁磁环(18)由成对的齿(421、422)轴向地周期性地延伸,从而形成空气间隙,在该空气间隙中放置有呈多极磁性环(6)的形式的第二固定元件(2),多极磁性环(6)优选地被径向地磁化。在该示例中,第一可动元件(1)可以有利地以材料带的形式来生产,材料带从铁磁材料片切割并且然后被局部地折叠以便产生成对的齿(421、422)。
[0063]
图8示出了一变型,其中,第一可动元件(1)为环(31)的形式,环(31)周期性地具有凹部(32)以形成周期性地间隔开的齿(41)。在图示中,环(31)的一部分未示出,以便更好地理解呈磁体(6)的形式的第二固定元件(2),磁体(6)的磁性定向在由软铁磁材料制成的两个盘(11a、11b)之间是沿着轴线(3)的轴向的。这些盘(11a、11b)由齿(42、42’)轴向地延伸——例如齿(42)是北极而齿(42’)是南极——使得齿(42、42’)面向彼此并且都在径向上与环(31)相对。所有齿(41、42、42’)形成磁极,这些磁极一起工作以形成磁性相互作用并形成由操纵环(31)的用户感觉到的凹口。
[0064]
图9示出了替代实施方式,其示出了本发明在旋转情况下不限于延伸了整360
°
的
元件。第一可动元件(1)具有筒形磁体(6),该筒形磁体(6)被轴向磁化并且放置在两个盘(11a、11b)之间,两个盘(11a、11b)由齿(41、41’)径向地延伸,齿(41、41’)形成交替的南磁极和北磁极。例如,盘(11a)的齿(41)具有北极,而齿(41’)具有由磁体(6)施加的南极,齿(41、41’)轴向地对准。在该示例中,具有18个齿(41)和18个齿(41’),以便形成18对磁极,从而限定极距pr。如果希望产生用户感觉得到的72个凹口,则可以使用具有由软铁磁材料制成的24个齿(42)的第二固定元件(2),如上所述。然而,没有必要保留这24个齿来产生72个所感觉得到的凹口。实际上,感觉到的转矩的幅度与最大公约数(gcd)成比例,最大公约数表示两个元件(1、2)之间的相互作用中存在的样式的数目。在本示例中,要产生72个凹口,gcd为6,这意味着可能有生成转矩的6个连续的样式。然后可以针对元件中的一个元件使用单个样式,也就是说,第二固定元件(2)上的24/6=4个齿(42),或4的任意倍数个齿(42)。在该示例中,1个样式——并且因此4个齿(42)——用于60
°
的角度延伸范围。感觉到的转矩的幅度与样式的数目成比例,这意味着与使用延伸了整360
°
的第二完全的固定元件(2)的情况相比,在该示例中感觉到的应力明显更小。
[0065]
图10示出了该图9的替代实施方式,该替代实施方式与图9的不同之处在于所使用的永磁体(6a、6b)是双极的,仍然被轴向磁化的——在图中不可见——磁体(6a)具有给定的轴向极性,磁体(6b)具有相反的轴向极性。槽(19)穿过盘(11a)以便产生磁性切口并且促进磁场从盘(11a)泄漏,槽的直径延伸部与磁体(6a、6b)的磁性过渡部平行。盘(11b)具有2*9个齿(41’),并且盘(11a)具有2*9个齿(41)。每个盘(11a、11b)的齿(41、41’)的总数目仍为18个,但是在磁敏探针(此处未示出)放置成与盘(11a)相对时,轴向地面向盘(11a)的漏磁通量可以用于位置检测功能。
[0066]
图11示出了根据本发明的装置的线性变型。第一可动元件(1)为紧固至磁体(6)的——用于音频混音器的“推子”类型的——游标(20)的形式,磁体(6)被捕获在两个带齿元件(11c、11d)之间,每个带齿元件由3个齿(41)横向地延伸。这些齿(41)与由软铁磁材料制成的目标相对,该目标形成第二固定元件(2),该第二固定元件(2)线性地延伸并且包括形成杆的齿(42),并且游标(20)在第二固定元件(2)的上方沿着轴线(3)移动,第一可动元件(1)与第二固定元件(2)通过由此处未示出的引导件保持的空气间隙而分开。在该示例中,对于线性间距为pt的所需凹口,考虑到下述旋转等效物:在该旋转等效物中希望在完整旋转内具有感觉得到的72个凹口,其中,第一可动元件(1)具有18个磁性周期并且第二固定元件(2)具有24个磁性周期,则第一可动元件(1)的齿(41)的线性周期必须等于pr=72/18*pt并且然后第二固定元件(2)的铁磁极的周期必须等于ps=72/24*pt。由于18和24的gcd为6,因此可以具有在第一可动元件(1)处使用的单个3齿样式。例如,如果希望每1mm获得凹口,则需要齿(41)具有pr=4mm的周期性并且第二固定元件(2)的铁磁极具有ps=3mm的周期性。在该图中,第二固定元件(2)具有大约43mm的长度,以用于大约33mm的行程和用户感觉到的尽可能多的凹口。
[0067]
图12示出了根据本发明的装置的球状变型,该球状变型允许用户在手柄(21)致动球形接头(22)的旋转期间的触觉感觉,此处手柄(21)沿着三个正交轴线(3、3’和3”)致动球形接头(22)。在该示例中,球状变型的形成是非限制性示例,球形接头(22)具有由软铁磁材料制成的多个极,所述多个极在手柄(21)被致动时在三对固定元件(2)的前方移动,三对固定元件(2)由在分离的永磁体(6)的两个侧部上的软铁磁材料的堆叠的片(22a、22b)、(22c、
22d)和(22e、22f)形成,永磁体(6)优选地定向成与所述片(22a、22b)、(22c、22d)和(22e、22f)垂直,所述片由面向球形接头(22)以便与所述球形接头(22)磁性地相互作用的齿(42)径向地延伸,所述球形接头(22)与固定元件(2)隔开了小的径向空气间隙。球形接头(22)由此处未示出的附加元件引导。该变型的尺寸将基于图11的变型的教示来完成。
[0068]
图13a和图13b是同一实施方式的两个不同的立体图,其中,图13示出了与图4的局部截面非常相似的局部截面,该局部截面与图4的局部截面不同之处在于磁极的数目和铁磁极的数目。在该示例中,第一可动元件(1)具有磁性环(16),该磁性环(16)具有径向定向的8个南-北极性,并且第二固定元件(2)具有由铁磁材料制成的环(12),该环(12)由6个齿(42)轴向地延伸,第一元件(1)和第二元件(2)径向地面向彼此。该构型可能使得在每个旋转中以24周期性生成应力。毂(23)紧固至环(12),以便允许第一可动元件(1)相对于第二固定元件(2)的引导和旋转。如在前面的示例中,可动元件可以变为固定的并且固定元件可以变为可动的,相对运动是相同的。
[0069]
图14a和图14b在所有方面都类似于图13a和图13b,除了第二固定元件(2)具有使铁磁环(12)延伸的仅3个齿(42)。因此,所获得的凹口数目是相同的、即24个,但根据获得的应力的较低幅度,由于少量的磁性相互作用,整体磁阻较高。
[0070]
图15示出了与图4的实施方式类似的实施方式,其中,第一元件(1)和第二元件(2)各自包括24个磁极以便产生24个凹口。
[0071]
图16示出了最后实施方式,其中,第一可动元件(1)和第二固定元件(2)分别包括永磁体(6a)和永磁体(6b)。在该非限制性示例中,磁体(6a)具有优选地径向定向的20个极性并且磁体(6b)具有12个极性,以便产生60个凹口。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1