用于估算电机参数的设备和方法与流程
1.本技术涉及一种用于估算电机参数、特别是用于在线估算电动机的电机参数的设备和方法。
背景技术:
2.电机参数的在线估算实现了对电动机的状态监测,例如相故障的估算或线圈温度的估算。
3.特别地,对于线圈温度估算,需要准确估算相电阻rs。然而,相电阻rs的估算取决于永磁体磁链ψ
pm
的值。此外,在负载或速度变化期间,非模型电压损耗的存在会导致估算的相电阻rs出现偏差。
[0004]“模型参考自适应控制(model reference adaptive controller;mrac)”和“adaline神经网络(adaline neural network:ann)”是众所周知的参数估算算法。特别地,mrca算法可用于估算相电阻rs,ann算法可用于估算永磁体磁链ψ
pm
,因此结合这两种算法的算法似乎适用于所要求的估算。
[0005]
然而,由于秩不足,在参考控制下不可能同时估算永磁体磁链ψ
pm
和相电阻rs,因此将直流电流设置为零(id=0a)。因此,在mrca模型中,将永磁体磁链ψ
pm
设置为常数值以估算相电阻rs,在ann模型中,将相电阻rs设置为常数值以估算永磁体磁链ψ
pm
。然而,这些模型没有考虑负载和速度变化期间的非模型电压损失,因此会导致估算参数与其实际值的偏差。然而,这些偏差会导致线圈温度估算出现误差。
技术实现要素:
[0006]
因此,本技术的目的是弥补上述缺点并提供一种能够在发生的运行条件下准确估算电机参数的设备和方法。
[0007]
所述目的通过根据权利要求1的设备、根据权利要求7的方法和根据权利要求13的计算机程序产品来实现。有利的进一步发展包括在从属权利要求中。
[0008]
根据本技术的一个方面,一种用于估算电机参数的设备,其包括:输入接口,其被配置为接收电机的运行参数;第一装置,其被配置为执行第一参数估算算法,第一参数估算算法基于运行参数和初始确定的第二电机参数估算出估算的第一电机参数;和第二装置,其被配置为执行第二参数估算算法,第二参数估算算法基于运行参数和初始确定的第一电机参数估算出估算的第二电机参数。所述设备还包括:第三装置,其被配置为执行第三参数估算算法,第三参数估算算法基于估算的第一电机参数和运行参数估算出修正的估算的第二电机参数;和第四装置,其被配置为执行第四参数估算算法,第四参数估算算法基于估算的第二电机参数和运行参数估算出修正的估算的第一电机参数。
[0009]
通过这种设备,可以考虑非模型运行参数的影响,以便提供对电机参数的更准确估算。
[0010]
在设备的一个有利实施方式中,运行参数包括检测的电压、检测的电流和检测的
电角速度中的至少一种,第一电机参数包括永磁体磁链,第二电机参数包括相电阻。
[0011]
通过选择这些运行参数和要估算的电机参数,可以准确地执行估算线圈温度所需的电机参数的估算。
[0012]
在设备的另一有利实施方式中,第一装置和第四装置包括执行参数估算算法的人工神经网络模型,第二装置和第三装置包括执行第二和第三参数估算算法的模型参考自适应控制模型。
[0013]
通过提供用于估算电机参数的相应参数估算算法,提供了合适的参数估算算法并且可以对电机参数进行准确和有效的估算。
[0014]
在设备的另一个有利实施方式中,初始确定的第一电机参数和初始确定的第二电机参数是常数值。
[0015]
通过所述确定,为估算提供合适的起始值。
[0016]
在设备的又一有利实施方式中,第三或第四装置被配置为能估算第三电机参数。
[0017]
通过以更准确的方式估算进一步的参数,可以改进对线圈温度的估算或者可以估算另外的参数。
[0018]
在设备的又一个有利实施方式中,第三电机参数包括电感。
[0019]
通过估算电感,可以确定线圈的故障。
[0020]
根据本技术的另一方面,一种方法包括以下步骤:基于运行参数和初始确定的第二电机参数估算出估算的第一电机参数;基于运行参数和初始确定的第一电机参数估算出估算的第二电机参数;基于估算的第一电机参数和运行参数估算出修正的估算的第二电机参数;和基于估算的第二电机参数和运行参数估算出修正的估算的第一电机参数。
[0021]
通过这种方法,可以考虑非模型运行参数的影响,以便提供对电机参数的更准确估算。
[0022]
在所述方法的一个有利实施方式中,运行参数包括检测的电压、检测的电流和检测的电角速度,第一电机参数包括相电阻,第二电机参数包括永磁体磁链。
[0023]
通过在所述方法中选择这些运行参数和电机参数,可以准确地执行估算线圈温度所需的电机参数的估算。
[0024]
在所述方法的另一个有利实施方式中,对估算的第一电机参数和修正的估算的第一电机参数的估算借助于人工神经网络模型执行,对估算的第二电机参数和修正的估算的第二电机参数的估算借助于模型参考自适应控制模型执行。
[0025]
通过使用用于估算电机参数的相应参数估算算法,使用了合适的参数估算算法并且可以对电机参数进行准确和有效的估算。
[0026]
在所述方法的另一有利实施方式中,将初始确定的第一电机参数和初始确定的第二电机参数设置为常数值。
[0027]
通过所述确定,为估算使用合适的起始值。
[0028]
在又一有利实施方式中,所述方法还包括以下步骤:估算第三电机参数。
[0029]
通过估算进一步的电机参数,可以改进对线圈温度的估算或者可以估算另外的电机参数。
[0030]
根据另一有利实施方式,第三电机参数包括电感。
[0031]
根据另一方面,一种计算机程序产品,其包括指令,当程序由计算机执行时,所述
指令使计算机执行所述方法的步骤。
[0032]
通过估算电感,可以确定线圈的故障。
附图说明
[0033]
下面参考附图借助于实施例来说明本技术。
[0034]
特别地,
[0035]
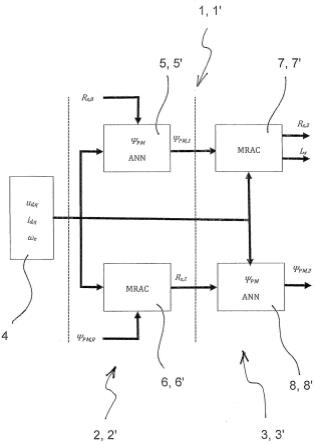
图1示出了根据本技术的设备和算法的框图;和
[0036]
图2示出了展示根据本技术的设备或方法的功效的图表。
具体实施方式
[0037]
图1示出了根据本技术的设备和算法的框图。
[0038]
在作为设备提供的实施例中,附图标记1描绘了用于估算电动机(未示出)的电机参数的设备。
[0039]
第一电机参数包括永磁体磁链ψ
pm
。第二电机参数包括相电阻rs。替代性地,可以估算其它电机参数。
[0040]
设备1包括第一估算器2和第二估算器3。此外,设备1包括输入接口4。
[0041]
输入接口4接收电动机的运行参数。输入接口4接收检测的电压u
d,q
、检测的电流i
d,q
和检测的电角速度ωe。在替代实施例中,并非所有这些运行参数都被输入或附加运行参数被输入。
[0042]
第一估算器2包括第一装置5和第二装置6,第一装置5包括相应地执行参数估算算法的人工神经网络(ann)模型,第二装置6包括相应地执行参数估算算法的模型参考自适应控制(mrac)模型。替代地,可以提供其它数量的装置、仅一个或两个以上,或者另一种模型、例如扩展卡尔曼滤波器(ekf)。
[0043]
第一装置5被配置为根据人工神经网络(ann)模型执行第一参数估算算法,从而基于运行参数u
d,q
、i
d,q
、ωe和初始确定的第二电机参数r
s,0
估算出估算的第一电机参数ψ
pm,1
。
[0044]
第二装置6被配置为根据模型参考自适应控制(mrac)模型执行第二参数估算算法,从而基于运行参数u
d,q
、i
d,q
、ωe和初始确定的第一电机参数ψ
pm,0
估算出估算的第二电机参数r
s,1
。
[0045]
第二估算器3包括第三装置7和第四装置8,第三装置7包括相应地执行参数估算算法的模型参考自适应控制(mrac)模型,第四装置8包括相应地执行参数估算算法的人工神经网络(ann)模型。替代地,可以提供其它数量的装置、仅一个或两个以上,或者另一种模型、例如并发学习自适应控制。
[0046]
第三装置7被配置为根据模型参考自适应控制(mrac)模型执行第三参数估算算法,从而基于估算的第一电机参数ψ
pm,1
和运行参数u
d,q
、i
d,q
、ωe估算出修正的估算的第二电机参数r
s,2
。
[0047]
第三装置7进一步估算第三电机参数ls。第三电机参数包括电感。替代地,估算另一个第三电机参数或不估算第三电机参数。
[0048]
第四装置8被配置为根据人工神经网络(ann)模型执行第四参数估算算法,从而基于估算的第二电机参数r
s,1
和运行参数u
d,q
、i
d,q
、ωe估算出修正的估算的第一电机参数
ψ
pm,2
。
[0049]
初始确定的第一电机参数ψ
pm,0
和初始确定的第二电机参数r
s,0
为常数值。替代地,初始确定的电机参数是变量值。
[0050]
估算器2、3和装置5、6、7、8被示为单独的模块,然而,替代地,它们可以全部或部分地集成在一个或多个模块中。
[0051]
在作为方法提供的实施例中,附图标记1
′
描绘了用于估算电动机的电机参数的方法。
[0052]
在使用中,用于估算电机参数的方法1
′
输入运行参数u
d,q
、i
d,q
、ωe。进一步地,设置初始确定的第二电机参数r
s,0
和初始确定的第一电机参数ψ
pm,0
。
[0053]
基于运行参数u
d,q
、i
d,q
、ωe和初始确定的第二电机参数r
s,0
,估算的第一电机参数ψ
pm,1
由第一参数估算算法5
′
估算。此外,基于运行参数u
d,q
、i
d,q
、ωe和初始确定的第一电机参数ψ
pm,0
,估算的第二电机参数r
s,1
由第二参数估算算法6
′
估算。
[0054]
此外,基于运行参数u
d,q
、i
d,q
、ωe和估算的第一电机参数ψ
pm,1
,修正的估算的第二电机参数r
s,2
由第三参数估算算法7
′
估算。此外,基于运行参数u
d,q
、i
d,q
、ωe和估算的第二电机参数r
s,1
,修正的估算的第一电机参数ψ
pm,2
由第四参数估算算法8
′
估算。
[0055]
第一参数估算算法5
′
和第二参数估算算法6
′
是第一估算器2
′
的元件,第一估算器2
′
表示装置以及软件模块。第三参数估算算法7
′
和第四参数估算算法8
′
是第二估算器3
′
的元件,第二估算器3
′
也表示装置以及软件模块。
[0056]
如上所述,第一电机参数包括永磁体磁链ψ
pm
,第二电机参数包括相电阻rs。替代地,可以估算其它电机参数。
[0057]
对估算的第一电机参数ψ
pm,1
和修正的估算的第一电机参数ψ
pm,2
的估算借助于人工神经网络(ann)模型执行,对估算的第二电机参数r
s,1
和修正的估算的第二电机参数r
s,2
的估算借助于模型参考自适应控制(mrac)模型执行。如上所述,估算可以仅由一种模型或由另一种模型执行,例如并发学习自适应控制。
[0058]
将初始确定的第一电机参数ψ
pm,0
和初始确定的第二电机参数r
s,0
设置为常数值。替代地,它们可以是变量值。
[0059]
第三参数估算算法7
′
进一步估算作为电感ls的第三电机参数。替代地,估算另一个电机参数或不估算进一步的电机参数。
[0060]
图2示出了展示根据本技术的设备或方法的功效的图表。
[0061]
上图表描绘了第二电机参数rs,中图表描绘了电感ls,下图表描绘了第一电机参数ψ
pm
。在左侧,示出了第一估算器(2、2
′
)的估算结果。在右侧,示出了第二估算器(3、3
′
)的估算结果。
[0062]
实线表示估算值,虚线表示测量值。
[0063]
在12秒时,电机速度增加,在7秒和18秒时,施加的负载扭矩增加。
[0064]
在描绘第一估算器(2、2
′
)的结果的图表中,可以看到由于电机速度和施加负载的增加而导致的估算的参数的偏差。此外,如右侧图表中第二估算器(3、3
′
)的结果所看到的,根据本技术的装置和算法显著改善了结果,因为除了变化时的短暂峰值,修正的估算的参数ψ
pm,2
和r
s,2
在动态负载变化期间保持不变。
[0065]
已经结合本文中的各种实施例描述了本技术。然而,通过研究附图、公开内容和所
附权利要求,本领域技术人员在实践要求保护的发明时可以理解和实现对所公开实施例的其它变化。这样的修改可以涉及本领域已知的其它特征,并且可以替代或附加于本文已经描述的特征来使用。在权利要求中,“包括”一词不排除其它元件或步骤,不定冠词“一个”或“一种”不排除复数。
[0066]
附图标记列表
[0067]1ꢀꢀꢀꢀꢀꢀꢀꢀ
用于估算电机参数的设备
[0068]1′ꢀꢀꢀꢀꢀꢀ
用于估算电机参数的方法
[0069]2ꢀꢀꢀꢀꢀꢀꢀꢀ
第一估算器
[0070]2′ꢀꢀꢀꢀꢀꢀ
第一估算器
[0071]3ꢀꢀꢀꢀꢀꢀꢀꢀ
第二估算器
[0072]3′ꢀꢀꢀꢀꢀꢀ
第二估算器
[0073]4ꢀꢀꢀꢀꢀꢀꢀꢀ
输入接口
[0074]5ꢀꢀꢀꢀꢀꢀꢀꢀ
第一装置
[0075]5′ꢀꢀꢀꢀꢀꢀ
第一参数估算算法
[0076]6ꢀꢀꢀꢀꢀꢀꢀꢀ
第二装置
[0077]6′ꢀꢀꢀꢀꢀꢀ
第二参数估算算法
[0078]7ꢀꢀꢀꢀꢀꢀꢀꢀ
第三装置
[0079]7′ꢀꢀꢀꢀꢀꢀ
第三参数估算算法
[0080]8ꢀꢀꢀꢀꢀꢀꢀꢀ
第四装置
[0081]8′ꢀꢀꢀꢀꢀꢀ
第四参数估算算法
[0082]
ψ
pm
ꢀꢀꢀꢀꢀ
第一电机参数(永磁体磁链)
[0083]
ψ
pm,0
ꢀꢀꢀ
初始确定的第一电机参数
[0084]
ψ
pm,1
ꢀꢀꢀ
估算的第一电机参数
[0085]
ψ
pm,2
ꢀꢀꢀ
修正的估算的第一电机参数
[0086]rs
ꢀꢀꢀꢀꢀꢀꢀ
第二电机参数(相电阻)
[0087]rs,0
ꢀꢀꢀꢀꢀ
初始确定的第二电机参数
[0088]rs,1
ꢀꢀꢀꢀꢀ
估算的第二电机参数
[0089]rs,2
ꢀꢀꢀꢀꢀ
修正的估算的第二电机参数
[0090]
lsꢀꢀꢀꢀꢀꢀꢀꢀ
第三电机参数(电感)
[0091]ud,q
ꢀꢀꢀꢀꢀ
检测的电压
[0092]id,q
ꢀꢀꢀꢀꢀ
检测的电流
[0093]
ωeꢀꢀꢀꢀꢀꢀꢀ
检测的电角速度
[0094]
ann
ꢀꢀꢀꢀꢀ
人工神经网络
[0095]
mrac
ꢀꢀꢀꢀ
模型参考自适应控制
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1