具有转子轴锁定机构的双马达同轴E型车轿的制作方法
具有转子轴锁定机构的双马达同轴e型车轿
1.相关申请的交叉引用
2.本技术要求于2019年12月16日提交的美国申请no.16/715,942的优先权,该美国申请的全部公开内容通过参引并入本文中。
技术领域
3.本公开涉及用于车辆的电动车桥组件,该电动车桥组件具有两个电动马达,其中,每个马达能够单独驱动相应的车桥轴。
背景技术:
4.电动车桥(“e型车桥”)组件可以包括构造成驱动或推进车桥的电动马达。混合动力车辆和电动车辆可以包括具有用以对共同的轴线的两个车轮进行推进的电动马达的e型车桥组件。双马达同轴e型车桥可以包括构造成推进第一半轴的车轮的第一马达以及构造成推进与第一半轴同轴的第二半轴的车轮的第二马达。换句话说,沿着一个共同的车桥,一个马达可以推进一个车轮,而另一马达独立地推进另一车轮。
技术实现要素:
5.在一个实施方式中,电动车桥组件包括:第一电动马达,该第一电动马达绕轴线定位并构造成向第一车桥轴提供驱动动力;第二电动马达,该第二电动马达绕轴线定位并构造成向与第一车桥轴同轴的第二车桥轴提供驱动动力;以及锁定组件,该锁定组件构造成将第一电动马达选择性地锁定至第二电动马达以一致旋转,使得第一电动马达可以向第一车桥轴和第二车桥轴提供驱动动力。
6.在另一实施方式中,电动车桥组件包括:第一电动马达,该第一电动马达包括构造成使第一转子轴旋转的第一转子并且构造成向第一车桥轴提供驱动动力;第二电动马达,该第二电动马达包括构造成使第二转子轴旋转的第二转子并且构造成向与第一车桥轴同轴的第二车桥轴提供驱动动力;以及锁定组件,该锁定组件构造成在(i)第一位置与(ii)第二位置之间线性平移,在第一位置中,第一转子轴能够相对于第二转子轴旋转,在第二位置中,第一转子轴以不可旋转的方式联接至第二转子轴,使得第一电动马达能够向第一车桥轴和第二车桥轴提供驱动动力。
7.在又一实施方式中,用于选择性地锁定电动车桥的两个同轴的车桥轴的系统包括:第一电动马达,该第一电动马达具有构造成驱动第一车桥轴的第一转子轴;第二电动马达,该第二电动马达具有构造成驱动与第一车桥轴同轴的第二车桥轴的第二转子轴;以及致动器,该致动器构造成当在安全模式期间操作时将第一转子轴锁定至第二转子轴,使得第一电动马达能够驱动第一车桥轴和第二车桥轴。
附图说明
8.图1是根据一个实施方式的电动车桥组件的横截面,其中,锁定组件在第一操作模
式下操作。
9.图2是图1的电动车桥组件的一部分的放大视图,其中,锁定组件在第二操作模式下操作。
10.图3是根据实施方式的锁定组件的横截面图。
具体实施方式
11.本文中描述了本公开的各实施方式。然而,应当理解的是,所公开的实施方式仅仅是示例,并且其他实施方式可以采用各种替代形式。这些图不一定是等比例的;为了示出特定部件的细节,一些特征可以被放大或最小化。因此,本文中所公开的具体结构和功能细节不应被解释为限制性的,而是仅作为用于教示本领域技术人员以各种方式采用各实施方式的代表性基础。如本领域普通技术人员将理解的,参照附图中的任何一个附图所图示和描述的各种特征可以与在一个或更多个其他附图中所图示的特征组合,以产生未明确图示或描述的实施方式。所图示的特征的组合为典型的应用提供了代表性的实施方式。然而,对于特定应用或实现方式,可能期望与本公开的教示相一致的特征的各种组合和改型。
12.本公开不限于下面描述的特定实施方式和方法,因为特定部件和/或条件当然可以改变。此外,本文中所使用的术语仅用于描述本公开的实施方式的目的,并且除非另有说明,否则不意在以任何方式进行限制。
13.如在说明书和所附权利要求中所使用的,除非上下文另有明确指示,否则单数形式“一”、“一种”和“该”包括复数指示物。除非上下文另有明确指示,否则以单数形式提及的部件意在包括多个部件。
14.本文中所使用的方向术语是参照示例性附图中所示的视图和取向做出的。中心轴线在附图中示出并且在下面进行了描述。诸如“外”和“内”的术语是相对于中心轴线而言的。例如,“外”表面意味着这些表面背向中心轴线,或者在另一“内”表面的外部。诸如“径向”、“直径”、“周向”等术语也是相对于中心轴线而言的。术语“前”、“后”、“上”和“下”表示所参照的附图中的方向。
15.如本文中所使用的,术语“驱动”或“供以动力”在指电动马达意在表示主动向特定部件提供驱动动力,以使与该部件相关联的单个车轮旋转。例如,如果电动马达具有使相关联的车桥轴旋转以用于使该车桥轴上的车轮旋转的转子轴,则可以说电动马达“驱动”该车轮或该车桥轴或者向该车轮或该车桥轴“供以动力”。第二车桥轴可以由于来自第二马达的驱动动力而旋转,并且因此可以说是第二马达而不是第一马达驱动该第二车桥轴。例如,如果机械锁被制造成使得马达中的一个马达现在向第一车桥轴和第二车桥轴提供主动推进力(而不是向车桥轴中的仅一个车桥轴提供推进力),则可以说马达现在驱动两个车桥轴。
16.e型车桥组件可以包括构造成驱动或推进车桥的电动马达。混合动力车辆和电动车辆可以包括具有电动马达的电动车桥组件,以推进一个车辆车桥的车桥轴。双马达同轴e型车桥可以包括构造成推进第一半轴的车轮的第一马达以及构造成推进与第一半轴同轴的第二半轴的车轮的第二马达。换句话说,沿着一个共同的车桥,一个马达可以推进一个车轮,而另一马达推进另一车轮。
17.在某些同轴e型车桥实施方式中,单个车桥(例如,前桥或后桥)的每个车轮由单独的相应电动马达独立驱动。如果马达中的一个马达失去向其相应车轮供以动力的能力,则
可能存在以下可能性:由于所有的扭矩都传递到车桥上的一个车轮,车辆可能会行驶不良。
18.因此,根据本文中所公开的实施方式,同轴e型车桥具有机械锁定或联接两个半轴的能力,所述两个半轴由相应的马达以其他方式独立驱动。如果马达中的一个马达失去向其相应车轮供以动力的能力,则可以致动锁定组件以将仍然工作的马达机械地联接至两个半轴。这使得车辆能够安全地“跛行回家”,直到可以进行修理为止。扭矩可以被提供给两个车轮,所述两个车轮由e型车桥上的两个马达中的仅一个马达供以动力。
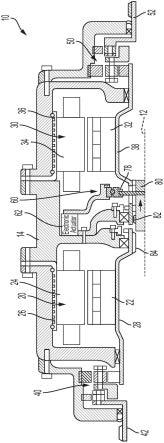
19.图1是根据一个实施方式的e型车桥组件10的横截面。在图1中,e型车桥组件10在正常条件下操作,其中,每个相应的车桥半轴由两个马达中的相应的一个马达驱动。图2是根据一个实施方式的在安全模式或“跛行回家”模式下操作的e型车桥组件的一部分的放大视图。在该视图中,锁定组件被致动以将e型车桥的一个马达的转子机械地联接至另一马达的转子,从而允许两个马达中的一个马达向两个半轴供以动力。图3是根据实施方式的锁定组件的横截面图。
20.参照图1至图3,e型车桥组件10包括第一马达20以及与第一马达20绕共同的轴线12同轴的第二马达30。马达可以是永磁马达、感应马达等。马达20、30也位于壳体14内。壳体14可以是在两个马达20、30上方延伸的单个壳体构件。或者,如图1所示,壳体14可以是紧固在一起的五个单独的壳体构件。可以使用多于或少于五个的壳体构件。一个或更多个壳体构件在下文中被统称为“壳体”。
21.在所示实施方式中,第一马达20具有第一转子22,该第一转子构造成相对于第一定子24旋转。第一定子24可以设置有金属(例如,铜)绕组。当从电源(比如电池,未示出)提供电流时,产生磁场,从而导致第一转子22在第一定子24内旋转。可以设置第一水套26以用于在操作期间使定子24冷却。第二马达30包括类似或相同的结构,比如第二转子32、围绕第二转子32的第二定子34以及第二水套36。
22.第一马达20的第一转子22连接(例如,以不可旋转的方式固定)至第一转子轴28。同样,第二马达30的第二转子32连接至第二转子轴38。当转子22、32绕轴线12旋转时,连接的转子轴28、38也绕轴线12旋转。在正常操作期间,每个马达20、30可以被独立地控制和供以动力,使得第一转子轴28和第二转子轴38可以彼此独立地旋转。这允许扭矩独立地被传递至车轮(未示出)。
23.第一转子轴28还连接至齿轮组比如第一行星齿轮组40。行星齿轮组40还连接至半轴,该半轴也被称为第一车桥轴42。行星齿轮组40将第一转子轴28的旋转运动转换成第一车桥轴42绕轴线12的旋转运动。行星齿轮组40可以构造成降低通过其传递的旋转速度,使得第一车桥轴42可以以相比于驱动第一转子轴28更慢的速度绕轴线12旋转。第一车桥轴42连接至第一车轮(未示出)以使该车轮旋转。第二转子轴38同样连接至齿轮组比如第二行星齿轮组50,该第二行星齿轮组类似地联接至第二车桥轴52以用于使第二车轮旋转。
24.e型车桥组件10包括锁定组件60。如下面将根据实施方式描述的,锁定组件60构造成将第一马达20与第二马达30机械联接。特别地,锁定组件60构造成将第一转子轴28与第二转子轴38选择性地机械联接,使得转子轴28、38一致旋转。在马达20、30中的一者失去其向其相应车轮正确地供以动力的能力的情况下,锁定组件60可以接合成使得两个转子轴28、38一起旋转,从而允许马达20、30中的一者主动向两个车桥轴42、52供以动力并因此向两个车轮供以动力。
25.根据实施方式,锁定组件60包括致动器62。致动器可以是能够比如沿平行于轴线12的方向线性移动的线性致动器。致动器62可以是能够使连接的部件沿平行于轴线12的方向线性移动的液压、电子或气动致动器。致动器62相对于壳体14固定,使得致动器不绕轴线12旋转。
26.致动器62联接至臂64。臂64从致动器62朝向轴线12径向向内延伸。臂64接收来自致动器62的致动力并且同样沿平行于轴线12的方向线性转移。在一个实施方式中,臂64绕轴线12环形地延伸。
27.臂64联接至轴承66。轴承66包括以不可旋转的方式固定至臂64的外圈68。可以设置卡环69以将外圈68接合并固定至臂64。轴承66还包括内圈70。多个滚动元件72(例如,滚珠)绕轴线12环形地布置并且径向地位于外圈68与内圈70之间。滚动元件72使得外圈68与内圈70之间能够相对旋转。锁定器销74以不可旋转的方式联接至内圈70。这允许锁定器销74与臂64之间的相对旋转。在应用中,锁定器销74可以旋转,而臂64保持不旋转。这可能在例如锁定组件60被致动以将第一转子轴28与第二转子轴38锁定时发生,使得锁定器销74随着两个连接的转子轴28、38旋转而旋转。锁定器销74从内圈70径向向内延伸,穿过第二转子轴38中的孔口76。可以设置卡环78以将内圈70接合并固定至锁定器销74。
28.当致动器62被致动时,臂64、轴承66和锁定器销74都可以一起轴向移动。换句话说,当致动器62被命令成线性移动时,这导致臂64、轴承66和锁定器销74也线性移动。
29.锁定组件60还包括锁定器轴80。当锁定组件被致动以使一个马达能够向两个车轮供以动力时,锁定器轴80提供第一转子轴28与第二转子轴38之间的物理连接。特别地,锁定器轴80以可旋转的方式联接至锁定器销74(即,可以相对于锁定器销旋转)并且还与锁定器销74沿着轴线12线性平移。同时,锁定器轴80可以经由径向设置在锁定器轴80与第二转子轴38之间的衬套或套筒81以不可旋转的方式联接至第二转子轴38(即,可以与第二转子轴一致旋转)。锁定器轴80具有带有表面特征82比如凹槽、齿、花键等的外表面。第一转子轴28在其内表面上具有对应的表面特征84。表面特征82、84可以选择性地彼此接合,以将锁定器轴80与第一转子轴28以不可旋转的方式联接。例如,这可以经由花键连接来实现。锁定器轴80能够沿着径向位于锁定器轴80与第二转子轴38之间的衬套或套筒86或在衬套或套筒内线性平移,以实现锁定器轴与衬套或套筒之间的相对轴向运动。
30.图1示出了在正常操作期间处于第一位置的锁定组件60。锁定器轴80设置在第一轴向位置中(例如,在该视图中向右)。在该位置中,锁定器轴80不与第一转子轴28接触。换句话说,表面特征82、84没有接合。这允许第一马达20向第一车桥轴42供以动力,而第二马达30可以独立地向第二车桥轴52供以动力。
31.响应于马达20、30中的一者的故障或其他类型的不能正确地向其相应的车桥轴42、52供以动力,致动器62可以由控制器(未示出)命令以进行致动从而在安全模式期间采取第二位置。在致动期间,电子装置或液压装置或气动装置被启用,以使致动器线性移动。这导致臂64线性移动(例如,在该视图中向左),从而导致连接的锁定器销74线性移动穿过第二转子轴38中的孔口76。锁定器轴80与锁定器销74一起线性移动,并且在锁定器轴的表面特征82与第一转子轴28的表面特征84之间形成接合。随着锁定器轴80与第一转子轴28之间的接合,第一转子轴28现在与锁定器轴80和第二转子轴38一致地旋转。这允许马达20、30中的一者向两个车桥轴42、52供以动力,否则这在正常操作期间是不可能的。在这种操作模
式下,如果一个马达出现故障,车辆能够在将动力和扭矩分配至车轮——这在正常操作期间可能是不可接受的——的情况下“跛行回家”,但仍然允许车辆行驶至安全的地方,在该安全的地方可以进行适当的维护。
32.上面的致动器62被描述为由控制器控制。控制器可以与致动器集成或者可以在致动器的外部。控制器可以是用于接收来自一个或更多个传感器的指示马达20、30中的一者的故障或失效或正常运行的信息并对应地控制致动器62线性移动的任何合适的控制器。在本公开中,术语“控制器”可以指执行代码的处理器硬件(共享的、专用的或成组的)和存储由处理器硬件执行的代码的存储器硬件(共享的、专用的或成组的),可以是上述处理器硬件和上述存储器硬件的一部分或者包括上述处理器硬件和上述存储器硬件。代码被配置成提供本文中所描述的控制器和系统的特征。在一个示例中,控制器可以包括处理器、存储器和非易失性存储器。处理器可以包括从微处理器、微控制器、数字信号处理器、微型计算机、中央处理单元、现场可编程门阵列、可编程逻辑设备、状态机、逻辑电路、模拟电路、数字电路或基于驻留在存储器中的计算机可执行指令操纵信号(模拟或数字)的任何其他设备中选择的一个或更多个设备。存储器可以包括单个存储器设备或多个存储器设备,其包括但不限于随机存取存储器(“ram”)、易失性存储器、非易失性存储器、静态随机存取存储器(“sram”)、动态随机存取存储器(“dram”)、闪速存储器、高速缓冲存储器或能够存储信息的任何其他设备。非易失性存储器可以包括一个或更多个持久性数据存储设备,比如硬盘驱动器、光盘驱动器、磁带驱动器、非易失性固态设备或能够持久存储信息的任何其他设备。处理器可以被配置为读入存储器并执行包含驻留在非易失性存储器中的一个或更多个软件程序的计算机可执行指令。驻留在非易失性存储器中的程序可以包括操作系统或应用或者是操作系统或应用的一部分,并且可以从使用各种编程语言和/或技术创建的计算机程序中编译或解释,上述各种编程语言和/或技术包括但不限于单独或组合的java、c、c++、c#、objective c、fortran、pascal、java script、python、perl以及pl/sql。程序的计算机可执行指令可以被配置成在由处理器执行时,使控制器命令致动器62沿线性方向移动,以使第一转子轴28与锁定器轴80选择性地接合或断开接合。
33.尽管上面描述了示例性实施方式,但是并不意味着这些示例性实施方式描述了权利要求所涵盖的所有可能形式。说明书中所使用的词语是描述性的而非限制性的词语,并且应当理解的是,在不脱离本公开的精神和范围的情况下可以做出各种改型。如先前所描述的,可以组合各个实施方式的特征以形成本发明的可能未明确描述或图示的其他实施方式。尽管各种实施方式可能已经被描述为在一个或更多个期望的特性方面提供优点或者优于其他实施方式或者现有技术实现方式,但是本领域普通技术人员认识到一个或更多个特征或特性可以被折衷以实现期望的整体系统属性,这取决于特定的应用和实现方式。这些属性可以包括但不限于成本、强度、耐久性、寿命周期成本、适销性、外观、包装、大小、适用性、重量、可制造性、易组装性等。因此,就一个或更多个特性而言,在任何实施方式被描述为期望值低于其他实施方式或现有技术实现方式的程度上,这些实施方式没有脱离本公开的范围并且可以被期望用于特定的应用。
34.部件列表
35.以下是附图中示出的附图标记的列表。然而,应当理解的是,这些术语的使用仅出于相对于一个实施方式的说明性目的。并且,对既在附图中图示又在权利要求中存在的与
某个术语相关的附图标记的使用并不意在将权利要求限制为仅覆盖图示的实施方式。
36.10电动车桥(“e型车桥”)组件12轴线14壳体20第一马达22第一转子24第一定子26第一水套28第一转子轴30第二马达32第二转子34第二定子36第二水套38第二转子轴40行星齿轮组42第一车桥轴50行星齿轮组52第二车桥轴60锁定组件62致动器64臂66轴承68外圈69卡环70内圈72滚动元件74锁定器销76孔口80锁定器轴82锁定器轴的表面特征84第一转子轴的表面特征86衬套或套筒。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1