逆变器控制装置、电动车辆系统的制作方法
1.本发明涉及一种逆变器控制装置以及使用它的电动车辆系统。
背景技术:
2.电动汽车(ev)和混合动力汽车(hev)等电动车辆中使用的驱动用旋转电机(马达)需要大功率及高转矩响应。因此,通常使用的是以三相逆变器来驱动使用有保持强大能量的稀土烧结磁铁的永磁铁式旋转电机(pm马达)的方式。三相逆变器通过pwm(脉宽调制)控制将由直流电源生成的直流电压转换为任意电压和频率的线间电压(交流电压),由此实现了马达的可变速驱动。
3.电动车辆中搭载的三相逆变器通常会检测从三相逆变器输出的三相电流而以与基于转矩指令的电流指令相吻合的方式控制三相电流,所述转矩指令是根据驾驶员的踏力来决定。三相电流是使用电流检测元件和a/d转换器来加以检测,所述电流检测元件存在于逆变器的主电路上,所述a/d转换器将由电流检测元件检测到的模拟信号转换为数字信号。与通常的电路一样,电流检测元件中配备有用于去除信号线中伴随的噪声的滤波器。该去噪滤波器能够去除噪声,另一方面,经由去噪滤波器的三相电流具有延迟要素,所以在检测电流与流至逆变器的实际电流之间产生背离。
4.进而,近年来像车载用途的低压大电流马达那样电感的值小、电气时间常数小的马达在增多。这样的马达与以往的马达相比,检测电流与实际电流的背离增加。
5.在以往的逆变器中,像上述那样产生检测电流与实际电流的背离会导致转矩指令与实际的输出转矩不一致,因此存在无法提供驾驶员所要求的加速性能这一问题。此外,用于保护逆变器和马达的故障安全功能的精度变差,在最坏的情况下有逆变器或马达毁坏之虞。
6.为了避免产生这样的检测电流与流至逆变器的实际电流的背离,例如已知有专利文献1的技术。专利文献1中记载了以下技术:经由时间常数小的滤波器来检测电流的斜率,根据该检测结果来切换时间常数不同的多个滤波器。现有技术文献专利文献
7.专利文献1:日本专利第6050841号
技术实现要素:
发明要解决的问题
8.在专利文献1的技术中,须设置多个时间常数不同的滤波器,所以在基板的贴装面积有限的情况下难以采用。此外,时间常数小的滤波器无法充分去除噪声,所以检测到的电流的斜率会偏离真值,结果,无法恰当地进行滤波器的切换,检测电流与实际电流的背离可能会恶化。尤其是前文所述那样的电感小的马达中电流纹波增大,所以检测电流与实际电流的背离恶化的可能性变高。
解决问题的技术手段
9.本发明的逆变器控制装置根据由对从逆变器输出或者输入至所述逆变器的交流电流进行检测的电流检测部给出的所述交流电流的检测结果的电流检测值和规定的电流指令值来控制所述逆变器,具备修正部,所述修正部修正所述电流检测值或所述电流指令值中的某一方,以修正因所述电流检测部所具有的滤波要素的延迟时间而产生的所述交流电流的检测误差。本发明的电动车辆系统具备上述逆变器控制装置、由所述逆变器控制装置控制的所述逆变器、以及由所述逆变器驱动的三相同步电动机,使用所述三相同步电动机的旋转驱动力来行驶。发明的效果
10.根据本发明,能够抑制逆变器的输出电流的检测结果与实际电流的背离。
附图说明
11.图1为表示具有本发明的第1实施方式的逆变器控制装置的马达驱动装置的构成的框图。图2为本发明的第1实施方式的逆变器控制装置的功能框图。图3为说明与调制率相应的电流指令值与实际电流的背离的图。图4为表示三角波信号与实际电流及电流检测值的关系的图。图5为表示根据调制率而变化的载波谐波电压纹波的图。图6为本发明的第1实施方式的电流检测值修正部的功能框图。图7为表示变更了调制率时的电流指令值与电流检测值的关系的一例的图。图8为表示将马达转速固定时使马达转矩正负反转时的、牵引时及再生时的实际电流和电流检测值的一例的图。图9为说明电流纹波的检测位置所引起的真值与检测值之间的背离方向的变化的图。图10为表示分别变更了调制率和电源电压时的电流指令值与电流检测值的关系的一例的图。图11为表示变更了调制率时的电流指令值与电流检测值的关系的一例的图。图12为表示分别变更了调制率和开关频率时的电流指令值与电流检测值的关系的一例的图。图13为表示变更了滤波器延迟时间常数时的电流指令值与电流检测值的关系的一例的图。图14为本发明的第2实施方式的逆变器控制装置的功能框图。图15为本发明的第2实施方式的电流指令值修正部的功能框图。图16为本发明的第3实施方式的电流检测值修正部的功能框图。图17为本发明的第4实施方式的电流检测值修正部的功能框图。图18为本发明的第5实施方式的电动车辆系统的构成图。
具体实施方式
12.(第1实施方式)下面,使用附图,对本发明的第1实施方式进行说明。
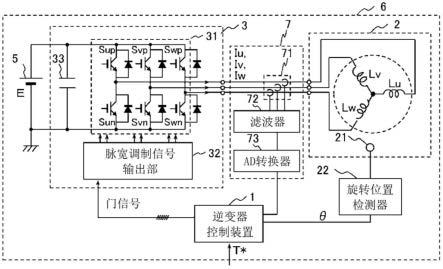
13.图1为表示具有本发明的第1实施方式的逆变器控制装置的马达驱动装置6的构成的框图。马达驱动装置6具有逆变器控制装置1、马达2、逆变器3、高压电池5以及电流检测部7。
14.逆变器控制装置1根据与车辆所要求的目标转矩相应的转矩指令t*向逆变器3输出门信号而控制逆变器3。再者,逆变器控制装置1的详情于后文叙述。
15.逆变器3连接于马达2和高压电池5,具有逆变电路31、脉宽调制信号输出部32以及平滑电容器33。
16.逆变电路31具有上臂开关元件sup、svp及swp和下臂开关元件sun、svn、swn。在马达2为牵引状态的情况下,使用这些开关元件将从高压电池5供给的直流电转换为交流电而输出至马达2。此外,在马达2为再生状态的情况下,将马达2所发出的交流电转换为直流电而输出至高压电池5。由此,逆变器3中可以使直流电与交流电相互转换。
17.脉宽调制信号输出部32根据来自逆变器控制装置1的门信号向逆变电路31的各开关元件输出脉宽调制信号(pwm信号)。各开关元件根据从脉宽调制信号输出部32输入的pwm信号而在规定时刻分别进行开关动作,由此在逆变电路31中进行直流电与交流电的相互转换。
18.平滑电容器33将从高压电池5供给至逆变电路31的直流电或者从逆变电路31输出至高压电池5的直流电平滑化。
19.高压电池5为马达驱动装置6的直流电压源。作为直流电压的高压电池5的电源电压e被逆变器3转换为可变电压、可变频率的脉冲状的三相交流电压,作为线间电压被施加至马达2。再者,高压电池5的直流电压e根据高压电池5的充电状态而大幅变动。
20.马达2是通过来自逆变器3的线间电压的供给来加以旋转驱动的同步马达。马达2上安装有旋转位置传感器21,以根据马达2的感应电压的相位而由逆变器控制装置1控制三相交流电压的相位。旋转位置检测器22根据旋转位置传感器21的输出信号来运算马达2中的转子的旋转位置θ。此处,旋转位置传感器21例如可以使用由铁心和绕组构成的旋转变压器等。或者,也可使用gmr传感器等磁阻元件或霍耳元件等来构成旋转位置传感器21。此外,也可不在马达驱动装置6中设置旋转位置检测器22而是根据马达2的三相电流或三相电压来推断旋转位置θ。
21.电流检测部7检测u相交流电流iu、v相交流电流iv以及w相交流电流iw作为在马达2中流通的三相交流电流。电流检测部7具有电流检测要素71、滤波器72、模/数(ad)转换器73。
22.电流检测要素71由霍耳元件等构成,分别检测三相交流电流iu、iv、iw,并输出与这些电流值相应的电压。再者,图1展示的是对应于三相交流电流的各相而电流检测部7具备3个电流检测要素71的例子,但也可将电流检测要素71设为2个而根据三相电流的和为零这一事实来算出剩下1相的电流值。此外,也能以插入于平滑电容器33与逆变器3之间的分流电阻rsh的两端的电压(直流电流检测值idc)的形式来检测流入逆变器3的脉冲状的直流母线电流并根据该检测结果来求三相交流电流。例如,可以根据逆变器3的各开关元件的状
态而在恰当的时刻获取直流电流检测值idc,由此利用直流电流检测值idc来再现三相交流电流。除此以外,还可以通过任意方法来检测三相交流电流iu、iv、iw。
23.滤波器72用于从作为电流检测要素71的输出的电压信号中去除噪声,是使用电阻和电容器来构成。滤波器72的时间常数τ是通过滤波器72的电阻分量rf和电容分量cf而以下式(1)来导出。τ=rf
×
cf
···
(1)
24.模/数(ad)转换器73获取从电流检测要素71经由滤波器72输入的电压信号作为模拟数据,并以规定采样率转换为数字数据。如此得到的数字数据从模/数(ad)转换器73输出至逆变器控制装置1。由此,在逆变器控制装置1中,能以数字数据的形式获取三相交流电流的检测值。
25.接着,使用图2,对逆变器控制装置1的详情进行说明。图2为本发明的第1实施方式的逆变器控制装置1的功能框图。本实施方式的逆变器控制装置1具有电流指令生成部11、三相/dq电流变换部12、电流控制部13、dq/三相电压变换部14、门信号生成部15、速度算出部16、开关频率生成部17、三角波生成部18、调制率运算部19、电流检测值修正部20这各个功能块,根据与电源电压e和转矩指令t*相对应的d轴电流指令id*及q轴电流指令iq*使逆变器3的逆变电路31驱动。逆变器控制装置1例如由微电脑构成,可以通过在微电脑中执行规定程序来实现这些功能块。或者,也可使用逻辑ic或fpga等硬件电路来实现这些功能块的一部分或全部。
26.电流指令生成部11根据转矩指令t*和电源电压e,使用马达转矩的关系式或图谱来决定d轴电流指令id*和q轴电流指令iq*。
27.三相/dq电流变换部12根据从电流检测部7输出的u相交流电流iu、v相交流电流iv、w相交流电流iw的各数字数据和从旋转位置检测器22输出的旋转位置θ来运算将三相交流电流的检测值作dq变换得到的d轴电流检测值id1及q轴电流检测值iq1。再者,由三相/dq电流变换部12运算的d轴电流检测值id1和q轴电流检测值iq1在以下分别称为“第一d轴电流检测值id1”、“第一q轴电流检测值iq1”。
28.电流检测值修正部20分别修正由三相/dq电流变换部12运算出的第一d轴电流检测值id1和第一q轴电流检测值iq1,以修正因电流检测部7所具有的滤波器72的延迟时间而产生的u相交流电流iu、v相交流电流iv以及w相交流电流iw的检测误差。继而,输出与这些修正结果相应的d轴电流检测值id2及q轴电流检测值iq2。再者,电流检测值修正部20的详情于后文叙述。通过由电流检测值修正部20分别修正第一d轴电流检测值id1和第一q轴电流检测值iq1来运算的d轴电流检测值id2及q轴电流检测值iq2在以下分别称为“第二d轴电流检测值id2”、“第二q轴电流检测值iq2”。
29.电流控制部13以由电流指令生成部11运算出的d轴电流指令id*及q轴电流指令iq*与由电流检测值修正部20运算出的第二d轴电流检测值id2及第二q轴电流检测值iq2分别一致的方式运算d轴电压指令vd*及q轴电压指令vq*。
30.dq/三相电压变换部14根据从电流控制部13输出的d轴电压指令vd*及q轴电压指令vq*和从旋转位置检测器22输出的旋转位置θ来运算将d轴电压指令vd*和q轴电压指令vq*作uvw变换得到的三相电压指令值即u相电压指令值vu*、v相电压指令值vv*、w相电压指令值vw*。
31.门信号生成部15根据从dq/三相电压变换部14输出的三相电压指令值即u相电压指令值vu*、v相电压指令值vv*以及w相电压指令值vw*与从三角波生成部18输出的三角波信号tr的比较结果而针对u相、v相、w相这各相来生成脉冲状的电压。继而,根据生成的脉冲状的电压来生成针对逆变器3的各相的开关元件的门信号。此时,使各相的上臂的门信号gup、gvp、gwp分别作逻辑反相而生成下臂的门信号gun、gvn、gwn。门信号生成部15所生成的门信号从逆变器控制装置1输出至逆变器3的脉宽调制信号输出部32,由脉宽调制信号输出部32转换为pwm信号。由此,逆变电路31的各开关元件得到导通/断开控制,从而调整逆变器3的输出电压。
32.速度算出部16根据旋转位置θ的时间变化来运算与马达2的旋转速度(转速)相应的电角度频率ωr。
33.开关频率生成部17根据转矩指令t*和电角度频率ωr来输出开关频率fc。再者,也可输出预先决定的固定的开关频率fc。
34.三角波生成部18根据开关频率fc来输出三角波信号tr。
35.调制率运算部19根据由电流指令生成部11运算出的d轴电流指令id*及q轴电流指令iq*和电源电压e来运算逆变器3的调制率mod。要运算调制率mod,调制率运算部19首先根据下式(2)来运算d轴电压vd及q轴电压vq。再者,式(2)为马达2的电压方程。vd=r
×
id-ωr
×
lq
×
iqvq=r
×
iq+ωr
×
ld
×
id+ωr
×
ke
···
(2)
36.式(2)中,id、iq分别表示d轴电流和q轴电流。在本实施方式中,以id=id*、iq=iq*的形式来计算式(2)。此外,ωr表示马达2的电角度频率,如前文所述,由速度算出部16加以运算。进而,ld、lq分别表示d轴电感和q轴电感,ke表示感应电压常数,r表示绕组电阻。这些值是根据马达2的结构来预先决定。
37.再者,感应电压常数ke有温度依存性,所以可根据下式(3)来考虑温度依存性而对式(2)的感应电压常数ke进行修正。式(3)展示了马达2所具有的转子的温度与感应电压的关系。根据式(3)得知,当转子的温度从平常温度t_nomi发生变动时,转子所具有的磁铁的温度发生变化,所以感应电压随之以线性方式发生变动。ke=ke_nomi+(t-tnomi)
×k···
(3)
38.式(3)中,ke_nomi表示平常温度的感应电压常数,t_nomi表示转子的平常温度,k表示感应电压的温度依存斜率。这些值是根据马达2的结构来预先决定。此外,t表示转子温度,使用未图示的温度传感器等来获取。
39.调制率运算部19根据利用式(2)导出的d轴电压vd及q轴电压vq而使用下式(4)来算出调制率mod。mod=2√(vd2+vq2)/e
···
(4)
40.再者,也可使用由下式(5)定义的电压利用率来代替上述调制率mod。不论使用哪一者都能进行同样的运算,所以后面以使用调制率mod的情况来进行说明。电压利用率=(线间电压实效值)/e
···
(5)
41.接着,在对作为本实施方式的特征的电流检测值修正部20的详情进行说明之前,对完成本发明的关注现象在下面进行说明。
42.图3为说明与调制率相应的电流指令值与实际电流的背离的图。图3中展示了将电
流指令值和电源电压分别固定时的马达2的转速与电流指令值、实际电流以及调制率的关系的一例。
43.如图3所示,得知,随着马达2的转速增大而调制率增大,从逆变器3流至马达2的实际电流与逆变器3的电流指令值相背离,该背离的大小最大约为0.8%左右。该误差单独来看较小,但决定马达2的转矩精度的影响因素除了这以外例如还有转子温度(磁铁温度)t、绕组电阻r等。因此,为了提高转矩精度,须在逆变器控制装置1中获取尽量减少了与实际电流的背离造成的误差的电流检测值。进而,电流检测值还用于逆变器3和马达2的保护,所以,从逆变器3和马达2的破损防止的观点来看,与实际电流一致的电流检测值的获取也比较重要。
44.接着,下面参考图4~图6,对在电流检测部7在与三角波信号tr相应的时刻获取的电流检测值与实际电流之间产生与以前文所述的式(4)计算的调制率mod相应的背离的2个理由进行说明。
45.首先,第1个理由是,电流检测部7中存在滤波器72作为去噪用的rc滤波器。如图1所示,进行三相交流电流的检测的电流检测部7中设置有使用电阻和电容器构成的滤波器72。逆变器控制装置1通过该滤波器72来获取电流检测值,由此,相对于实际电流而在电流检测值中产生延迟,从而产生与真值的背离。
46.图4为表示三角波信号tr与实际电流及电流检测值的关系的图。图4中以三相交流电流中的u相交流电流iu为例而将从三角波生成部18输出的三角波信号tr表示为符号41,将u相交流电流iu的实际的值(实际电流)表示为符号42,将电流检测部7中经由滤波器72的u相交流电流iu的值(电流检测值)表示为符号43。此外,将模/数(ad)转换器73对电流检测值43进行采样保持而获得的数字数据值表示为符号44。
47.如图4所示,模/数(ad)转换器73例如在三角波信号tr的峰侧也就是从上升转为下降的时刻和三角波信号tr的谷侧也就是从下降转为上升的时刻分别采样保持而获取u相交流电流iu的检测值并输出至逆变器控制装置1。再者,由于逆变器控制装置1的处理负荷上的限制等,也可仅在三角波信号tr的峰侧或谷侧中的一侧获取u相交流电流iu的检测值。
48.对图4的实际电流42与电流检测值43进行比较得知,在三角波信号tr的峰侧和谷侧的时刻,电流检测值43略高于实际电流42。因此,根据电流检测值43而获得的数字数据值44也比采样时间点的实际电流42高。如此,由于电流检测部7经由滤波器72来获取电流检测值43,所以相对于实际电流42而在电流检测值43中产生延迟,从而产生背离。
49.其次,第2个理由是,根据调制率mod而变化的载波谐波电压纹波对电流检测值产生影响。
50.图5为表示根据调制率mod而变化的载波谐波电压纹波的图。如前文所述,从电流检测部7输出至逆变器控制装置1的三相交流电流的电流检测值是在三角波信号tr的峰侧和谷侧分别检测到的。因此,对电流检测值主要产生影响的频率分量是三角波信号tr的开关频率fc的2倍分量。根据图5得知,开关频率fc的2倍分量(2fc+/-f1)在调制率mod为0.6附近达到最大。再者,f1为马达2的基波频率,由下式(6)给出。f1=(马达转速)/60
×
(马达的极数)/2
···
(6)
51.如以上所说明,在电流检测部7所获取的电流检测值与实际电流之间因“去噪用的rc滤波器”和“根据调制率而变化的载波谐波电压纹波”而产生与调制率mod相应的背离。因
此,在本发明中,在逆变器控制装置1中由电流检测值修正部20根据rc滤波器的时间常数、开关频率fc以及电源电压e来修正从电流检测部7获取到的电流检测值而消除与实际电流的背离。
52.接着,下面对电流检测值修正部20的详情进行说明。图6为本发明的第1实施方式的电流检测值修正部20的功能框图。本实施方式的电流检测值修正部20是具有修正电流算出部(牵引)201、修正电流算出部(再生)202、牵引/再生判定部203、切换部204、电流绝对值运算部205、修正增益运算部206、d轴修正部207、q轴修正部208这各个功能块而构成。
53.修正电流算出部(牵引)201及修正电流算出部(再生)202根据调制率mod、电源电压e、开关频率fc、滤波器延迟时间常数τ、电流振幅|i|来分别算出牵引用修正电流δicmp_p及再生用修正电流δicmp_g。下面,对这些修正电流与调制率mod、电源电压e、电流振幅|i|、开关频率fc、滤波器延迟时间常数τ的关系依序进行说明,之后对修正电流的算出方法进行详细叙述。
54.首先,对修正电流与调制率mod的关系进行叙述。图7为表示变更了调制率mod时的电流指令值与电流检测值的关系的一例的图。再者,图7中是将电源电压e、开关频率fc以及滤波器延迟时间常数τ分别设为固定值。
55.如图7所示,电流检测值依存于调制率mod而变化,与电流指令值之间产生背离。因而得知,为了补偿该背离,须根据调制率mod来改变修正电流。
56.此外,如图7所示,电流指令值与电流检测值的背离在牵引和再生下方向不一样。即,在牵引和再生下,电流检测值相对于电流指令值的高低不一样。下面使用图8和图9对其理由进行说明。
57.图8为表示将马达转速固定时使马达转矩正负反转时的、牵引时及再生时的实际电流和电流检测值的一例的图。如图8的左侧所示,在牵引时,包含电流纹波的实际电流是在电流纹波的下降时被检测到。因此,有滤波器延迟的情况下的电流检测值比无滤波器延迟的情况下的电流检测值大。另一方面,如图8的右侧所示,在再生时,包含电流纹波的实际电流是在电流纹波的上升时被检测到。因此,有滤波器延迟的情况下的电流检测值比无滤波器延迟的情况下的电流检测值小。
58.图9为说明电流纹波的检测位置所引起的真值与检测值之间的背离方向的变化的图。如图9的左侧所示,在电流纹波的下降时进行检测的牵引时,检测到因滤波器的延迟而高于真值的电流。另一方面,如图9的右侧所示,在电流纹波的上升时进行检测的再生时,检测到因滤波器的延迟而低于真值的电流。
59.因此,像图7中说明过的那样,在牵引和再生下,电流检测值相对于电流指令值的高低不一样。因而得知,修正电流也须随之在牵引和再生下予以改变。
60.接着,对修正电流与电源电压e的关系进行叙述。图10为表示分别变更了调制率mod和电源电压e时的电流指令值与电流检测值的关系的一例的图。再者,图10中是将电流振幅|i|、开关频率fc以及滤波器延迟时间常数τ分别设为固定值。
61.如图10所示,电流指令值与电流检测值的背离的变化与电源电压e成比例。其原因在于,当电源电压e增大时,电流纹波随之增大。因而得知,为了补偿该背离,须与电源电压e成比例地改变修正电流。
62.接着,对修正电流与电流振幅|i|的关系进行叙述。图11为表示变更了调制率mod
时的电流指令值与电流检测值的关系的一例的图。再者,图11中是将开关频率fc及滤波器延迟时间常数τ分别设为固定值。
63.如图11所示,当增大电流指令值时,电流检测值随之增大,电流指令值与电流检测值的背离便随之增大。因而得知,为了补偿该背离,须根据电流振幅|i|来改变修正电流。
64.接着,对修正电流与开关频率fc的关系进行叙述。图12为表示分别变更了调制率mod和开关频率fc时的电流指令值与电流检测值的关系的一例的图。再者,图12中是将电源电压e、电流振幅|i|以及滤波器延迟时间常数τ分别设为固定值。
65.如图12所示,开关频率fc越是升高,电流指令值与电流检测值的背离便越是减少。其原因在于,当开关频率fc增大时,流至马达2的电流以细密的周期小幅变化,由此使得电流纹波减少。因而得知,为了补偿该背离,须与开关频率fc成反比地改变修正电流。
66.最后,对修正电流与滤波器延迟时间常数τ的关系进行叙述。图13为表示变更了滤波器延迟时间常数τ时的电流指令值与电流检测值的关系的一例的图。再者,图13中是将电源电压e、电流振幅|i|以及开关频率fc分别设为固定值。
67.如图13所示,滤波器延迟时间常数τ越是增大,电流指令值与电流检测值的背离便越是增大。其原因在于,当滤波器延迟时间常数τ变长时,图9所示的电流纹波的检测位置发生偏移。因而得知,为了补偿该背离,须根据滤波器延迟时间常数τ来改变修正电流。
68.若将以上说明过的关系加以整理,则牵引用修正电流δicmp_p及再生用修正电流δicmp_g分别以下式(7)、(8)表示。即,修正电流算出部(牵引)201利用式(7)来运算牵引用修正电流δicmp_p,修正电流算出部(再生)202利用式(8)来运算再生用修正电流δicmp_g。δicmp_p=e/fc
×
τ
×
f_p(mod)
···
(7)δicmp_g=e/fc
×
τ
×
f_g(mod)
···
(8)
69.式(7)、(8)中,e表示电源电压,fc表示开关频率,τ表示滤波器延迟时间常数。此外,式(7)的f_p(mod)表示根据依存于调制率的牵引用修正表来决定的系数,式(8)的f_g(mod)表示根据依存于调制率的再生用修正表来决定的系数。再者,这些修正表的值可在电源电压e、开关频率fc、滤波器延迟时间常数τ这各参数分别固定的条件下预先通过模拟或实验来导出。进而,也可使用这些参数分别变更组合得到的多个条件的图谱来进行线性插补,由此求出f_p(mod)和f_g(mod)。如此也会充分发挥本发明的效果。
70.返回至图6的说明,牵引/再生判定部203根据电角度频率ωr和转矩指令t*来判定逆变器3的动作为牵引区域或再生区域中的哪一方。具体而言,若电角度频率ωr与转矩指令t*的积为零或正,则牵引/再生判定部203判断为牵引区域而输出“1”,若为负,则判断为再生区域而输出“0”。
71.切换部204根据牵引/再生判定部203的输出来选择修正电流算出部(牵引)201或修正电流算出部(再生)202某一方的输出而输出至修正增益运算部206。具体而言,在牵引/再生判定部203的输出为“1”的情况下,选择修正电流算出部(牵引)201的输出即牵引用修正电流δicmp_p作为修正电流δicmp而输出至修正增益运算部206。此外,在牵引/再生判定部203的输出为“0”的情况下,选择修正电流算出部(再生)202的输出即再生用修正电流δicmp_g作为修正电流δicmp而输出至修正增益运算部206。
72.电流绝对值运算部205根据下式(9)来运算用于修正电流算出和修正增益运算的
电流振幅|i|即三相交流电流的绝对值。|i|=√(id2+iq2)
···
(9)
73.修正增益运算部206根据下式(10)来运算用于修正电流检测值的修正增益kcmp。kcmp=(|i|+δicmp)/|i|
···
(10)
74.d轴修正部207利用下式(11)、通过对第一d轴电流检测值id1乘以修正增益运算部206中运算出的修正增益kcmp来求第二d轴电流检测值id2。id2=kcmp
×
id1
···
(11)
75.与d轴修正部207一样,q轴修正部208利用下式(12),通过对第一q轴电流检测值iq1乘以修正增益运算部206中运算出的修正增益kcmp来求第二q轴电流检测值iq2。iq2=kcmp
×
iq1
···
(12)
76.电流检测值修正部20像以上说明过的那样根据调制率mod、电源电压e、开关频率fc、滤波器延迟时间常数τ以及电流振幅|i|来分别修正第一d轴电流检测值id1和第一q轴电流检测值iq1,运算出第二d轴电流检测值id2及第二q轴电流检测值iq2。由此,能够有效地抑制电流检测部7经由滤波器72检测到的电流检测值与在马达2与逆变器3之间实际流通的实际电流之间产生的背离。
77.通过本实施方式,无需追加传感器即可减少因调制率和rc滤波器的延迟时间常数而恶化的电流真值与检测值的背离。由此,马达的转矩指令与实际输出的转矩指令一致,从而能输出精度高的马达转矩。另外,能够检测马达的三相电流的真值,所以能避免超过用于保护逆变器和马达的检测阈值,从而能防止逆变器和马达的破损。
78.根据以上说明过的本发明的第1实施方式,取得以下作用效果。
79.(1)电流检测部7检测从逆变器3输出或者输入至逆变器3的三相交流电流。逆变器控制装置1根据基于电流检测部7给出的三相交流电流的检测结果的电流检测值即第一d轴电流检测值id1及第一q轴电流检测值iq1和规定的电流指令值即d轴电流指令id*及q轴电流指令iq*来控制逆变器3。逆变器控制装置1具备电流检测值修正部20,所述电流检测值修正部20修正第一d轴电流检测值id1及第一q轴电流检测值iq1,以修正因电流检测部7所具有的滤波要素即滤波器72的延迟时间τ而产生的三相交流电流的检测误差。因此,能够抑制逆变器3的输出电流的检测结果与实际电流的背离。
80.(2)电流检测值修正部20根据逆变器3的调制率mod或电压利用率来修正第一d轴电流检测值id1及第一q轴电流检测值iq1。因此,能以抑制根据调制率mod或电压利用率发生变化的电流指令值与实际电流的背离的方式修正电流检测值。
81.(3)电流检测值修正部20根据逆变器3的开关频率fc、施加至逆变器3的直流电压即电源电压e、滤波器72的延迟时间τ、以及交流电流的振幅|i|而按照前文所述的式(7)~(12)来修正第一d轴电流检测值id1及第一q轴电流检测值iq1。因此,能以抑制根据上述各参数发生变化的电流指令值与实际电流的背离的方式修正电流检测值。
82.(4)电流检测值修正部20通过修正增益运算部206来运算基于逆变器3的调制率mod或电压利用率、逆变器3的开关频率fc、施加至逆变器3的直流电压即电源电压e、滤波器72的延迟时间τ、以及交流电流的振幅|i|的修正增益kcmp。具体而言,在修正电流算出部(牵引)201及修正电流算出部(再生)202中,根据式(7)、(8)来分别运算牵引用修正电流δicmp_p、再生用修正电流δicmp_g。继而,在修正增益运算部206中,使用这些运算结果和由
电流绝对值运算部205利用式(9)运算的电流振幅|i|,根据式(10)来运算修正增益kcmp。进而,在d轴修正部207及q轴修正部208中,利用式(11)、(12)对第一d轴电流检测值id1及第一q轴电流检测值iq1分别乘以修正增益kcmp,由此来修正第一d轴电流检测值id1及第一q轴电流检测值iq1。因此,可以能够可靠地抑制电流指令值与实际电流的背离地修正电流检测值。
83.(第2实施方式)接着,对本发明的第2实施方式进行说明。在本实施方式中,对修正电流指令值而不是电流检测值的例子进行说明。
84.图14为本发明的第2实施方式的逆变器控制装置1a的功能框图。本实施方式的逆变器控制装置1a与图2所示的第1实施方式的逆变器控制装置1的不同点在于,具有电流指令值修正部20a代替电流检测值修正部20。再者,与逆变器控制装置1一样,本实施方式的逆变器控制装置1a例如也由微电脑构成,可以通过在微电脑中执行规定程序来实现各功能块。或者,也可使用逻辑ic或fpga等硬件电路来实现功能块的一部分或全部。
85.电流指令值修正部20a分别修正从电流指令生成部11输出的d轴电流指令id1*和q轴电流指令iq1*,以修正因电流检测部7所具有的滤波器72的延迟时间而产生的u相交流电流iu、v相交流电流iv以及w相交流电流iw的检测误差。继而,将与这些修正结果相应的d轴电流指令id2*及q轴电流指令iq2*输出至电流控制部13。以下,将从电流指令生成部11输出的修正前的d轴电流指令id1*及q轴电流指令iq1*分别称为“第一d轴电流指令id1*”、“第一q轴电流指令iq1*”。此外,将通过由电流指令值修正部20a对第一d轴电流指令id1*和第一q轴电流指令iq1*分别进行修正来运算的d轴电流指令id2*及q轴电流指令iq2*分别称为“第二d轴电流指令id2*”、“第二q轴电流指令iq2*”。
86.图15为本发明的第2实施方式的电流指令值修正部20a的功能框图。本实施方式的电流指令值修正部20a与图6所示的第1实施方式的电流检测值修正部20的不同点在于,具有修正增益运算部206a、d轴修正部207a、q轴修正部208a来分别代替修正增益运算部206、d轴修正部207、q轴修正部208。
87.修正增益运算部206a根据下式(13)来运算用于修正电流指令值的修正增益kcmp*。kcmp*=(|i|-δicmp)/|i|
···
(13)
88.d轴修正部207a利用下式(14),通过对第一d轴电流指令id1*乘以修正增益运算部206a中运算出的修正增益kcmp*来求第二d轴电流指令id2*。id2*=kcmp*
×
id1*
···
(14)
89.与d轴修正部207a一样,q轴修正部208a利用下式(15),通过对第一q轴电流指令iq1*乘以修正增益运算部206a中运算出的修正增益kcmp*来求第二q轴电流指令iq2*。iq2*=kcmp*
×
iq1*
···
(15)
90.电流指令值修正部20a像以上说明过的那样根据调制率mod、电源电压e、开关频率fc、滤波器延迟时间常数τ以及电流振幅|i|来分别修正第一d轴电流指令id1*和第一q轴电流指令iq1*,运算出第二d轴电流指令id2*及第二q轴电流指令iq2*。由此,与第1实施方式一样,能够有效地抑制电流检测部7经由滤波器72检测到的电流检测值与在马达2与逆变器3之间实际流通的实际电流之间产生的背离。
91.(第3实施方式)接着,对本发明的第3实施方式进行说明。在本实施方式中,对通过与第1实施方式中说明过的不一样的功能构成来实现图2的电流检测值修正部20的例子进行说明。
92.像图7中说明过的那样,根据调制率mod发生变化的电流指令值与电流检测值的背离在牵引和再生下方向不一样,所以,修正电流也须随之在牵引和再生下予以改变。然而,牵引时与再生时的修正电流的差异仅仅是相对于电流指令值的方向即正负符号的差异。因而,在本实施方式中,考虑到这一点而对电流检测值修正部20的功能构成进行了简化。
93.图16为本发明的第3实施方式的电流检测值修正部20的功能框图。本实施方式的电流检测值修正部20与图6所示的第1实施方式的不同点在于,不具有修正电流算出部(再生)202,以及,设置有增益变更部209来代替切换部204。
94.增益变更部209根据牵引/再生判定部203的输出对从修正电流算出部(牵引)201输出的牵引用修正电流δicmp_p乘以1或-1中的某一增益。具体而言,在牵引/再生判定部203的输出为“1”的情况下,对牵引用修正电流δicmp_p乘以1而作为修正电流δicmp输出至修正增益运算部206。此外,在牵引/再生判定部203的输出为“0”的情况下,对牵引用修正电流δicmp_p乘以-1,由此使得符号反转而作为修正电流δicmp输出至修正增益运算部206。由此,根据逆变器3的动作为牵引区域或再生区域中的某一方来使修正电流δicmp的符号反转。
95.根据以上说明过的本发明的第3实施方式,能在简化电流检测值修正部20的功能构成的同时取得与第1实施方式中说明过的同样的作用效果。
96.再者,在以上说明过的本发明的第3实施方式中,也可以省略修正电流算出部(牵引)201而不是修正电流算出部(再生)202。在该情况下,只要使增益变更部109进行乘法运算的增益的正负反转即可。即,本实施方式的电流检测值修正部20可以具备修正电流算出部(牵引)201或修正电流算出部(再生)202中的任一者来实现。
97.此外,也可对第2实施方式中说明过的电流指令值修正部20a运用与以上说明过的本发明的第3实施方式同样的运算方法。如此也能取得与第2实施方式中说明过的同样的作用效果。
98.(第4实施方式)接着,对本发明的第4实施方式进行说明。在本实施方式中,对通过与第1实施方式、第3实施方式中说明过的不一样的功能构成来实现图2的电流检测值修正部20的例子进行说明。
99.图17为本发明的第4实施方式的电流检测值修正部20的功能框图。本实施方式的电流检测值修正部20与图6所示的第1实施方式的不同点在于,不具有修正增益运算部206,对d轴修正部207及q轴修正部208输入修正电流δicmp而不是修正增益kcmp。
100.在本实施方式中,d轴修正部207利用下式(16),通过对第一d轴电流检测值id1累计修正电流δicmp来求第二d轴电流检测值id2。id2=id1+δicmp
···
(16)
101.与d轴修正部207一样,q轴修正部208利用下式(17),通过对第一q轴电流检测值iq1累计修正电流δicmp来求第二q轴电流检测值iq2。iq2=iq1+δicmp
···
(17)
102.根据以上说明过的本发明的第4实施方式,能在简化电流检测值修正部20的功能构成的同时取得与第1实施方式中说明过的同样的作用效果。
103.再者,也可对第2实施方式中说明过的电流指令值修正部20a和第3实施方式中说明过的电流检测值修正部20运用与以上说明过的本发明的第4实施方式同样的运算方法。如此也能取得与第2实施方式、第3实施方式中说明过的同样的作用效果。
104.(第5实施方式)接着,使用图18,对将本发明的逆变器控制装置运用于电动车辆系统的实施方式进行说明。
105.图18为本发明的第5实施方式的电动车辆系统的构成图。如图18所示,本实施方式的电动车辆系统具有以电动发电机的形式运用马达2的动力总成。
106.在图18的电动车辆系统中,在车体800的前部可旋转地轴颈支承有前轮车轴801,在前轮车轴801的两端设置有前轮802、803。在车体800的后部可旋转地轴颈支承有后轮车轴804,在后轮车轴804的两端设置有后轮805、806。
107.在前轮车轴801的中央部设置有作为动力分配机构的差速器811,将从发动机810经由变速器812传递的旋转驱动力分配至左右的前轮车轴801。发动机810与马达2是由设置于发动机810的曲轴的带轮810a和设置于马达2的转轴的带轮820a经由皮带830以机械方式连结在一起。
108.由此,马达2的旋转驱动力能够传递至发动机810,发动机810的旋转驱动力能够传递至马达2。马达2通过逆变器控制装置1的控制而从逆变器3输出的三相交流电被供给至定子的定子线圈,使得转子旋转,产生与三相交流电相应的旋转驱动力。
109.即,马达2作为根据逆变器控制装置1的控制而由逆变器3驱动的电动机进行动作,另一方面,作为接受发动机810的旋转驱动力而转子旋转、由此在定子的定子线圈中感应出电动势而产生三相交流电的发电机进行动作。
110.逆变器3是将从作为高电压(42v或300v)系电源的高压电池5供给的直流电转换为三相交流电的功率变换装置,按照运转指令值来控制与转子的磁极位置相应的、流至马达2的定子线圈的三相交流电流。
111.由马达2发出的三相交流电被逆变器3转换为直流电而对高压电池5进行充电。高压电池5经由dc-dc转换器824而电性连接于低压电池823。低压电池823构成电动车辆系统的低电压(14v)系电源,被用于使发动机810初始起动(冷起动)的起动机825、收音机、灯等的电源。
112.在车辆处于等待信号灯等停车时(怠速停止模式)时,使发动机810停止,在再发车时使发动机810再起动(热起动)时,利用逆变器3来驱动马达2而使发动机810再起动。再者,在怠速停止模式中,在高压电池5的充电量不足的情况或者发动机810还未充分热起来的情况等之下,不停止发动机810而继续驱动。此外,在怠速停止模式中,须确保空调的压缩机等以发动机810为驱动源的辅机类的驱动源。在该情况下,使马达2驱动来驱动辅机类。
113.在处于加速模式时或高负荷运转模式时,也使马达2驱动来辅助发动机810的驱动。反过来,在处于需要高压电池5的充电的充电模式时,通过发动机810使马达2发电而对高压电池5进行充电。即,进行车辆的制动时或减速时等的再生模式。
114.在使用逆变器控制装置1的本实施方式的电动车辆系统中,无需追加传感器即可
减少因调制率和rc滤波器的延迟时间常数而恶化的电流真值与检测值的背离,所以指令值与实际转矩一致,从而能输出精度高的马达转矩。因此,能以廉价的构成来实现驾驶员期望的转矩。进而,能够检测马达的三相电流的真值,所以不会超过用于保护逆变器和马达的检测阈值,能够防止逆变器和马达的破损,从而能防止电动车辆的驱动停止。
115.再者,本实施方式的电动车辆系统是对为混合动力汽车的情况进行的说明,而在插电式混合动力汽车、电动汽车等情况下也会获得同样的效果。
116.此外,在上述各实施方式中,对单独的逆变器控制装置进行了说明,但只要具有该上述功能,则也可以对逆变器控制装置与逆变器一体化而成的逆变器装置或者逆变器装置与马达一体化而成的马达驱动系统运用本发明。
117.再者,本发明不限定于上述实施方式,可以在不脱离本发明的宗旨的范围内进行各种变更。符号说明
118.1、1a
…
逆变器控制装置,2
…
马达,3
…
逆变器,5
…
高压电池,6
…
马达驱动装置,7
…
电流检测部,11
…
电流指令生成部,12
…
三相/dq电流变换部,13
…
电流控制部,14
…
dq/三相电压变换部,15
…
门信号生成部,16
…
速度算出部,17
…
开关频率生成部,18
…
三角波生成部,19
…
调制率运算部,20
…
电流检测值修正部,20a
…
电流指令值修正部,21
…
旋转位置传感器,22
…
旋转位置检测器,31
…
逆变电路,32
…
脉宽调制信号输出部,33
…
平滑电容器,71
…
电流检测要素,72
…
滤波器,73
…
模/数(ad)转换器,201
…
修正电流算出部(牵引),202
…
修正电流算出部(再生),203
…
牵引/再生判定部,204
…
切换部,205
…
电流绝对值运算部,206、206a
…
修正增益运算部,207、207a
…
d轴修正部,208、208a
…
q轴修正部,209
…
增益变更部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1