马达驱动装置以及使用其的空气调节器的室外机、马达驱动控制方法与流程
1.本发明涉及对马达(电动机)进行驱动的马达驱动装置及其控制,特别是涉及有效地适用于在要求静音性的用途中使用的马达(电动机)的驱动控制的技术。
背景技术:
2.永磁同步马达的感应电压理想地是仅包含基波分量,但实际上在三相静止坐标上存在5次分量、7次分量这样的空间高次谐波分量。该感应电压的失真分量成为马达转矩发生脉动的一个原因,该变动的转矩成为机械共振的激励源,从而发生噪音、振动。
3.例如通过对固定马达的部位、旋转轴承部设置防振橡胶,能够减轻由于机械共振而产生的噪音、振动。但是,在这个方法中,问题在于伴随部件件数的增加而构造变复杂、以及成本增加。
4.由此,推进开发一种无需使用防振橡胶那样的部件而通过永磁同步马达的控制方法来抑制作为机械共振的激励源的转矩脉动的技术(以下称为转矩脉动抑制控制)。
5.在通过控制来抑制转矩脉动的情况下,当生成控制指令时,需要事先掌握包含有何种程度的感应电压的失真分量。作为一个手段,考虑事先测定包含感应电压波形的马达特性的方法,但并不容易针对不特定的马达进行单独的测定。另外,在既有的产品等中还有马达特性的测定困难的情况。
6.作为本技术领域的背景技术,例如有专利文献1那样的技术。在专利文献1中公开了“一种同步电动机的驱动控制装置,其特征在于,具备:电流控制单元,获取定子电流作为以转子n极相位为d轴相位的正交2轴的dq同步坐标系上的矢量信号,以追踪最终电流指令值的方式进行控制;补偿信号生成单元,生成用于对初始转矩指令值或者初始电流指令值进行补偿的补偿信号;以及最终电流指令值生成单元,使用所生成的补偿信号来补偿初始转矩指令值或者初始电流指令值,生成最终电流指令值,其中,以实时抽出包含于感应电压的高次谐波分量的一部分或者全部、并至少使用实时抽出的感应电压高次谐波分量、定子电流相当值以及转子速度相当值来生成补偿信号的方式,构成该补偿信号生成单元”。
7.通过如专利文献1那样在马达驱动装置内根据控制指令、传感器信息而在线地推测期望的参数,即便是搭载不特定的马达的风扇、泵等的用途也能够实现高的通用性。
8.另外,在专利文献2中公开了“一种电力变换装置,使用开关元件根据基于失效时间的长度指令的开关指令而进行了接通以及断开动作时的从电力变换部向负载供给的电流值或者用于生成开关指令的电压指令值,求出对电压指令值进行补偿的补偿量,其中,所述失效时间的长度指令决定作为使开关元件成为断开状态的保护期间的失效时间的长度”。
9.另外,在专利文献3中公开了“一种马达驱动装置,具备:电力变换电路,驱动永磁马达;以及控制部,控制所述电力变换电路,所述控制部包括电压指令生成部和转矩脉动补偿部,所述转矩脉动补偿部包括振幅生成部、校正电压生成部以及加法部,所述电压指令生
成部输出电压指令,所述振幅生成部输出校正电压振幅,所述校正电压生成部根据所述校正电压振幅和转子位置而输出校正电压指令,所述加法部根据所述电压指令和所述校正电压指令而输出校正后电压指令,根据所述校正后电压指令而使所述电力变换电路动作”。
10.现有技术文献
11.专利文献1:日本特开2012-100510号公报
12.专利文献2:日本特开2018-182901号公报
13.专利文献3:日本特开2017-229126号公报
技术实现要素:
14.然而,永磁同步马达中的感应电压的失真分量如上所述在三相静止坐标上包含5次、7次这样的次数分量。这些次数分量在与马达的电气性的旋转同步的二轴正交坐标(以下为dq坐标)上呈现为6次分量。由此,通过在dq坐标上构筑如上述专利文献1公开的观测器(observer),能够根据包含于控制指令、传感器信息的6次分量来推测与干扰相当的感应电压的失真分量。
15.然而,在由于多个要因而在控制指令、传感器信息中含有6次分量的情况下,在如专利文献1公开的方法中针对每个要因而未区分影响,所以存在无法高精度地推测感应电压的失真分量这样的课题。
16.作为在控制指令、传感器信息中含有6次分量的其它要因,有由逆变器引起的输出电压误差。逆变器通过使开关元件动作而对马达供给电力,为了防止上下支路之间的短路而设定使开关元件同时断开的期间(以下还称为失效时间(dead time))。与此相伴地,逆变器的输出电压相对指令电压而产生偏移,在dq坐标上发生6次的干扰电压。
17.根据以上,在由马达引起的感应电压失真和由逆变器引起的输出电压失真同时存在的时候实现转矩脉动抑制控制的情况下,需要采取如下手段:从控制指令、传感器信息中区分这些影响,单独地推测关联参数并进行补偿。
18.在上述专利文献2中,公开了一种从检测电流中分离上述2个影响的有效的手段。在这个方法中,通过使通常设定为恒定的失效时间的长度以6次以外的周期进行变化,从而避免与以6次周期进行变化的感应电压的失真分量之间的干扰。
19.在专利文献2中补偿由逆变器引起的输出电压失真,但认为通过组合对由马达引起的感应电压失真进行补偿的既存的手段,能够实现更有效的转矩脉动抑制控制。然而,在使失效时间的长度变化的情况下,需要使具有宽度的设定的下端值不低于为了防止上下支路之间的短路而所需的断开期间,导致控制设计变复杂。
20.另外,在风扇、泵用途中使用廉价的驱动装置,有时难以如专利文献2那样使失效时间周期性地变化。
21.因此,本发明的目的在于,提供一种能够有效地抑制由于由马达引起的感应电压失真以及由逆变器引起的输出电压失真而造成的转矩脉动的马达驱动装置以及使用其的空气调节器的室外机、马达驱动控制方法。
22.为了解决上述课题,本发明的特征在于,具备:电力变换电路,对马达供给电力;控制部,控制所述电力变换电路;以及电流传感器,检测对所述马达通电的三相电流,所述控制部具有:指令电压运算部,运算对所述马达的驱动作出贡献的指令电压;脉动电流检测
部,根据将由所述电流传感器检测到的三相检测电流分离为相互正交的分量而得到的各分量,生成抽出所述各分量的脉动量而得到的第一分量和第二分量;转矩脉动补偿部,根据所述第一分量,输出对由所述马达的构造引起的转矩脉动进行补偿的第一补偿指令电压;以及失效时间补偿部,根据所述第二分量,输出对由所述电力变换电路的失效时间引起的输出电压失真进行补偿的第二补偿指令电压,通过利用所述第一补偿指令电压以及所述第二补偿指令电压来校正所述指令电压,降低所述转矩脉动以及所述输出电压失真。
23.另外,本发明是一种空气调节器的室外机,具备:永磁同步马达;马达驱动装置,驱动所述永磁同步马达;风扇,与所述永磁同步马达连接;框架,安装所述永磁同步马达;以及压缩机装置系统,所述空气调节器的室外机的特征在于,所述马达驱动装置是具有上述特征的马达驱动装置。
24.另外,本发明的特征在于,检测对马达通电的三相电流,将该检测的三相检测电流分离为相互正交的分量,生成抽出各分量的脉动量而得到的第一分量和第二分量,根据所述第一分量,生成对由所述马达的构造引起的转矩脉动进行补偿的第一补偿指令电压,根据所述第二分量,生成对由电力变换电路的失效时间引起的输出电压失真进行补偿的第二补偿指令电压,通过利用所述第一补偿指令电压以及所述第二补偿指令电压来校正对所述马达的驱动作出贡献的指令电压,降低所述转矩脉动以及所述输出电压失真。
25.根据本发明,能够提供可有效地抑制由于由马达引起的感应电压失真以及由逆变器引起的输出电压失真而造成的转矩脉动的马达驱动装置以及使用其的空气调节器的室外机、马达驱动控制方法。
26.由此,无需通过预备试验等进行事先调整而能够降低马达的噪音、振动,能够实现可应对各种马达的通用性高的马达驱动装置和使用其的空气调节器的室外机、马达驱动控制方法。
27.上述以外的课题、结构以及效果通过以下的实施方式的说明而会变得清楚。
附图说明
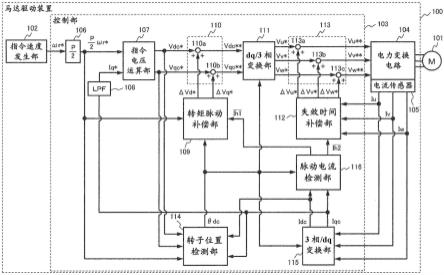
28.图1是示出本发明的实施例1所涉及的马达驱动装置的结构的图。
29.图2是在dq坐标上表现图1的结构的一部分的图。
30.图3是示出每个要因的电压失真波形的一个例子的图。
31.图4是示出仅使q轴电流通电的情况的电流矢量以及电压失真分量的轨迹的图。
32.图5是示出图1的脉动电流检测部116的结构的图。
33.图6是示出图1的转矩脉动补偿部109的结构的图。
34.图7是示出图1的失效时间补偿部112的结构的图。
35.图8是示出本发明的实施例1所涉及的马达驱动装置的动作波形的一个例子的图。
36.图9是示出本发明的实施例2所涉及的马达驱动装置的结构的图。
37.图10是示出图9的转矩脉动补偿部109’的结构的图。
38.图11是示出本发明的实施例2所涉及的马达驱动装置的动作波形的一个例子的图。
39.图12是示出使d轴以及q轴电流通电的情况的电流矢量以及电压失真分量的轨迹的图。
40.图13是示出本发明的实施例3所涉及的马达驱动装置的结构的图。
41.图14是示出图13的脉动电流检测部116’的结构的图。
42.图15是示出本发明的实施例4所涉及的空气调节器的室外机的图。
43.(符号说明)
44.100:马达驱动装置;101:永磁同步马达(马达);102:指令速度发生部;103:控制部;104:电力变换电路;105:电流传感器;106:增益乘法部;107:指令电压运算部;108:lpf(低通滤波器);109、109’:转矩脉动补偿部;110、110a、110b:加法部;111:dq/3相变换部;112:失效时间补偿部;113、113a、113b、113c:加法部;114:转子位置检测部;115:3相/dq变换部;116、116’:脉动电流检测部;200:永磁同步马达(dq坐标模型);201a、201b:加法部;202a、202b:加法部;203、204:乘法部;500:cos6θdc信号生成部;503:sin6θdc信号生成部;501、504:乘法部;502、505:lpf(低通滤波器);600:积分控制部;601:加法部;602:初始值设定部;603:sin6θdc信号生成部;604、606、607、608:乘法部;605:cos6θdc信号生成部;700:积分控制部;701:初始值设定部;702:加法部;703、705、707:符号函数部;704、706、708:乘法部;1000:补偿电压运算部;1002:lpf(低通滤波器);1003、1004、1006、1007:乘法部;1005、1008:加法部;1400:电流相位运算部;1401:dq/γδ变换部;1402:加法部;1403:cos6θdc’信号生成部;1404:sin6θdc’信号生成部;1405、1406:乘法部;1500:室外机(单元);1501:风扇马达用驱动装置;1502:压缩机马达用驱动装置;1503:风扇马达;1504:风扇;1505:框架;1506:压缩机装置;1507:交流电源;ωr:马达速度;ωr*:指令速度(马达速度指令);ω1c:通过pll得到的电角速度;vu*、vv*、vw*:三相指令电压;vdc*、vqc*:d轴以及q轴指令电压;δvd*、δvq*:d轴以及q轴补偿指令电压;vdc**、vqc**:补偿后的d轴以及q轴指令电压;δvu*、δvv*、δvw*:三相补偿指令电压;vu**、vv**、vw**:补偿后的三相补偿指令电压;iu、iv、iw:三相检测电流;id、iq:d轴以及q轴电流;idc、iqc:d轴以及q轴检测电流;ih1-、ih2-:电流脉动的第一分量以及第二分量;θd:转子位置;θdc:转子位置的推测值;δθc:轴误差;τm:马达转矩;p:马达极数;r:绕组电阻;ld、lq:d轴以及q轴电感;ke:感应电压系数;kehd、kehq:d轴以及q轴上的感应电压系数的脉动分量(失真分量);keh-:kehd以及kehq的振幅值;keh*-:振幅值keh-的设定值;δkeh-:keh*-的运算中的调整值;keh0-:keh*-的运算中的初始值;vtd:由逆变器引起的输出电压失真的三相静止坐标分量;vtdd、vtdq:由逆变器引起的输出电压失真的d轴以及q轴分量;vtd-:vtd的振幅值;vtd*-:振幅值vtd-的设定值;δvtd-:振幅值vtd*-的运算中的调整值;vtd0-:振幅值vtd*-的运算中的初始值;δvd1*-、δvd2*-:d轴补偿电压的第一振幅以及第二振幅(第一d轴补偿指令电压、第二d轴补偿指令电压);δvq1*-、δvq2*-:q轴补偿电压的第一振幅以及第二振幅(第一q轴补偿指令电压、第二q轴补偿指令电压);iγc、iδc:γ轴以及δ轴检测电流;β:电流相位;vac:交流电压;vdc:直流电压。
具体实施方式
45.以下,使用附图来说明本发明的实施例。此外,在各附图中对于同一结构附加同一符号,关于重复的部分,省略其详细的说明。
46.实施例1
47.参照图1至图8,说明本发明的实施例1的马达驱动装置及其控制方法。
48.图1是本实施例的马达驱动装置的结构图。如图1所示,本实施例的马达驱动装置100具备指令速度发生部102、控制部103、对永磁同步马达101(以下还简称为“马达”)供给电力的电力变换电路104(以下还称为“逆变器”)、以及电流传感器105。在本实施例中,马达驱动装置100具备指令速度发生部102,但也可以是设置于控制部103中或者马达驱动装置100外部的结构。
49.控制部103根据从指令速度发生部102提供的指令速度ωr*以及由电流传感器105检测的三相检测电流iu、iv、iw而输出三相指令电压vu*、vv*、vw*,进行马达101的旋转速度控制。在本实施例中,由电流传感器105检测三相所有的电流,但也可以构成为由电流传感器105检测任意的二相部分,并由控制部103运算剩余的一相。
50.电力变换电路104根据从控制部103输出的三相指令电压vu*、vv*、vw*而进行pwm(pulse width modulation,脉冲宽度调制)控制,发生脉冲状的输出电压,从而驱动马达101。
51.控制部103以矢量控制为基本结构。从指令速度发生部102输入到控制部103的指令速度ωr*在增益乘法部106中被乘以增益“马达极数p/2”,运算出电角速度(p/2)
·
ωr*。
52.在指令电压运算部107中,根据预先设定的d轴指令电流id*、从q轴检测电流iqc经由lpf(low pass filter,低通滤波器)108计算出的q轴指令电流iq*、电角速度(p/2)
·
ωr*、以及马达常数的设定值,运算d轴以及q轴指令电压vdc*、vqc*。d轴以及q轴指令电压vdc*、vqc*是对马达101的旋转作出贡献的直流量的指令电压。
53.转矩脉动补偿部109运算用于对由马达引起的感应电压失真的影响进行补偿的d轴以及q轴补偿指令电压δvd*、δvq*。d轴以及q轴补偿指令电压δvd*、δvq*在加法部110中与d轴以及q轴指令电压vdc*、vqc*相加,生成补偿后的d轴以及q轴指令电压vdc**、vqc**。此外,加法部110由加法部110a、110b构成。
54.dq/3相变换部111根据转子位置θdc,将补偿后的d轴以及q轴指令电压vdc**、vqc**变换为三相指令电压vu*、vv*、vw*。
55.失效时间补偿部112生成用于对由逆变器引起的输出电压失真的影响进行补偿的三相补偿指令电压δvu*、δvv*、δvw*。三相补偿指令电压δvu*、δvv*、δvw*在加法部113中与三相指令电压vu*、vv*、vw*相加,生成补偿后的三相指令电压vu**、vv**、vw**,并输入到电力变换电路104。此外,加法部113由加法部113a、113b、113c构成。
56.在转子位置检测部114中,根据d轴以及q轴指令电压vdc*、vqc*、d轴以及q轴检测电流idc、iqc、电角速度(p/2)
·
ωr*、以及马达常数的设定值,运算控制轴(dc轴)和马达的磁通轴(d轴)的相位偏差即轴误差δθc。并且,通过pll(phase locked loop,锁相环)以使δθc成为零的方式控制电角速度,并对得到的值进行积分,从而运算转子位置θdc。即,在本实施例中,构成不需要位置传感器的无传感器矢量控制。
57.在3相/dq变换部115中,根据转子位置θdc,将三相检测电流iu、iv、iw变换为d轴以及q轴检测电流idc、iqc。
58.在脉动电流检测部116中,根据转子位置θdc和d轴以及q轴检测电流idc、iqc,抽出作为d轴以及q轴检测电流idc、iqc的脉动量的第一分量ih1-和第二分量ih2-。第一分量ih1-被输入到转矩脉动补偿部109,第二分量ih2-被输入到失效时间补偿部112,分别被利用于与补偿控制有关的参数的推测运算。
59.即,在本实施例中,由马达引起的感应电压失真的影响和由逆变器引起的输出电压失真的影响被表现为d轴以及q轴检测电流idc、iqc的脉动量,通过由脉动电流检测部116适当地抽出其信息而进行控制。
60.以上是本实施例的基本结构。
61.在指令电压运算部107中,依照以下的式(1),根据d轴指令电流id*、q轴指令电流iq*、电角速度(p/2)
·
ωr*、以及马达常数的设定值,运算d轴以及q轴指令电压vdc*、vqc*。
62.[数学式1]
[0063][0064]
在式(1)中,r表示绕组电阻,ld表示d轴电感,lq表示q轴电感,ke表示感应电压系数,上标字符*表示各马达常数的设定值。
[0065]
在指令电压运算部107中,使用预先设定的恒定值作为d轴指令电流id*,使用通过lpf108对q轴检测电流iqc实施低通滤波处理得到的值作为q轴指令电流iq*,进行式(1)的运算。
[0066]
由此,在马达101以恒定速度被驱动的稳定状态下,d轴指令电流id*、q轴指令电流iq*成为恒定,d轴以及q轴指令电压vdc*、vqc*也同样地成为恒定。
[0067]
在转子位置检测部114中,依照以下的式(2),根据d轴以及q轴指令电压vdc*、vqc*、d轴以及q轴检测电流idc、iqc、电角速度ω1c、和马达常数的设定值,运算轴误差δθc。
[0068]
[数学式2]
[0069][0070]
在式(2)中,电角速度ω1c是通过利用pll以使轴误差δθc成为零的方式调整电角速度而得到的信号。在转子位置检测部114中,通过对电角速度ω1c进行积分来运算转子位置θdc。
[0071]
在用以上的结构来驱动马达101时,如上所述由马达引起的感应电压失真的影响和由逆变器引起的输出电压失真的影响被表现为d轴以及q轴检测电流idc、iqc的脉动量。以下,使用图2来说明这个原理。
[0072]
图2是图示出图1所示的结构之中的说明所需的要素的图,并未示出转矩脉动补偿部109、失效时间补偿部112。另外,用dq坐标上的等效模型来示出永磁同步马达200。在减法部201a、201b中,减去对d轴以及q轴上的感应电压系数的失真分量kehd、kehq乘以电角速度(p/2)
·
ωr得到的(p/2)
·
ωr
·
kehd、(p/2)
·
ωr
·
kehq。
[0073]
即,减法部201a、201b在dq坐标上等效地表现由马达引起的感应电压失真的影响。
[0074]
在减法部202a、202b中,减去由d轴以及q轴上的失效时间引起的输出电压失真vtdd、vtdq。
[0075]
即,减法部202a、202b在dq坐标上等效地表现由逆变器引起的输出电压失真的影响。
[0076]
此外,在图2中,实线的箭头表示包含“直流量+交流量”,虚线的箭头表示仅包含“直流量”。
[0077]
如图2所示,在存在由马达引起的感应电压失真和由逆变器引起的输出电压失真的情况下,由指令电压运算部107生成的d轴以及q轴指令电压vdc*、vqc*分别被减去作为交流量的“(p/2)
·
ωr
·
kehd+vtdd”和“(p/2)
·
ωr
·
kehq+vtdq”。
[0078]
其结果,在永磁同步马达200中,在d轴以及q轴各自上除了直流量id-、iq-以外还被通电脉动量idh、iqh。在这些电流之中,q轴电流“iq-+iqh”经由lpf108而被变换为q轴指令电流iq*并被反馈给指令电压运算部107。此时,设定成使lpf108的截止频率比q轴电流的脉动量iqh的变动频率充分地小,成为iq*=iq-。
[0079]
由此,由指令电压运算部107生成的d轴以及q轴指令电压vdc*、vqc*成为直流量,仅控制d轴以及q轴电流的直流量id-、iq-。
[0080]
另一方面,脉动量idh、iqh与指令电压运算部107无关地原样地残留,所以通过检测这些电流脉动量,能够观测由马达引起的感应电压失真“(p/2)
·
ωr
·
kehd、(p/2)
·
ωr
·
kehq”和由逆变器引起的输出电压失真“vtdd、vtdq”的影响。
[0081]
在此,设为d轴以及q轴的感应电压系数的失真分量相互相等(kehd=kehq)。另外,在静止坐标上,用以下的式(3)表示由失效时间引起的输出电压失真。
[0082]
[数学式3]
[0083]
δv
td
=td·
fc·vdc
·
sign(i)
···
(3)
[0084]
在式(3)中,td是失效时间的长度,fc是载波频率,vdc是施加到逆变器的直流电压,sign(i)表示各相的检测电流的极性。
[0085]
在图3中,图示出在马达中仅对q轴侧通电了电流的情况下(d轴电流为零)的由马达引起的感应电压失真“(p/2)
·
ωr
·
kehd、(p/2)
·
ωr
·
kehq”和由逆变器引起的输出电压失真“vtdd、vtdq”。
[0086]
如图3所示,由马达引起的感应电压失真“(p/2)
·
ωr
·
kehd、(p/2)
·
ωr
·
kehq”成为在d轴、q轴上振幅都相同、且相位相互偏移90
°
的脉动电压。另一方面,由逆变器引起的输出电压失真“vtdd、vtdq”成为在d轴上为锯齿波状、在q轴上为半波状、且形状相互大幅不同的脉动电压。
[0087]
在以脉动振幅的观点来观察时,相比于q轴侧的vtdq而d轴侧的vtdd的一方更大,所以可知由逆变器引起的输出电压失真在d轴侧、即非通电轴侧显著地出现。
[0088]
在dq坐标上图示该特性时,能够表现为如图4所示。在图4中,i是电流矢量(仅通电q轴电流),x是由马达引起的感应电压失真的轨迹,y是由逆变器引起的输出电压失真的轨迹。x成为圆状的轨迹,相对于此,y成为半月状的轨迹。
[0089]
另外,在仅着眼于6次分量而用公式来表现时,由马达引起的感应电压失真和由逆变器引起的输出电压失真分别用以下的式(4)和式(5)来表示。
[0090]
[数学式4]
[0091][0092]
[数学式5]
[0093][0094]
其中,在式(4)中,keh-是kehd以及kehq的振幅。另外,在式(5)中,vtdd-和vtdq-是vtdd和vtdq的振幅。
[0095]
在本实施例中,将从由逆变器引起的输出电压失真中的特征抽出d轴以及q轴检测电流idc、iqc的脉动量的脉动电流检测部116设为图5所示的结构。
[0096]
如上所述,由逆变器引起的输出电压失真主要出现在作为非通电轴的d轴侧,所以从d轴检测电流idc抽出由失效时间补偿部112使用的第二分量ih2-。
[0097]
更具体而言,在假设vtdd的变动频率充分快(即,假设马达速度充分快)时,电流相位相对电压相位而延迟90
°
,而且根据式(5)作为主分量的vtdd是sinθd的函数,所以通过在乘法部501中对d轴检测电流idc乘以cos6θdc,检测由逆变器引起的输出电压失真的影响。在lpf502中,抽出作为乘法部501的运算结果的idc
·
cos6θdc的直流量,输出第二分量ih2-。
[0098]
另一方面,从q轴检测电流iqc,作为由马达引起的感应电压失真的影响,抽出在转矩脉动补偿部109中使用的第一分量ih1-。
[0099]
更具体而言,根据式(4),(p/2)
·
ωr
·
kehq是cos6θd的函数,所以在乘法部504中对q轴检测电流iqc乘以sin6θdc。在lpf505中,抽出作为乘法部504的运算结果的iqc
·
sin6θdc的直流量,输出第一分量ih1-。
[0100]
在本实施例中,在脉动电流检测部116中包括lpf502和lpf505,但也可以是将这些lpf去除的结构。这是因为,转矩脉动补偿部109和失效时间补偿部112具备基于第一分量ih1-和第二分量ih2-的积分控制,作为结果会消除idc
·
cos6θdc和iqc
·
sin6θdc的交流量。关于详情,在后面叙述。
[0101]
图6是转矩脉动补偿部109的结构图。转矩脉动补偿部109根据由脉动电流检测部116抽出的第一分量ih1-和电角速度(p/2)
·
ωr*,生成用于对在由马达引起的感应电压失真中发生的转矩脉动进行补偿的d轴以及q轴补偿指令电压δvd*、δvq*。
[0102]
首先,在积分控制部600中,根据电流脉动的第一分量ih1-,生成调整信号δkeh-。调整信号δkeh-在加法部601中与由初始值设定部602设定的初始值keh0-相加,生成设定值keh*-。
[0103]
之后,由sin6θdc信号生成部603生成的sin6θdc和电角速度(p/2)
·
ωr*分别在乘法部604和607中与keh*-相乘,生成d轴补偿指令电压δvd*。同样地,由cos6θdc信号生成部605生成的cos6θdc和电角速度(p/2)
·
ωr*分别在乘法部606和608中与keh*-相乘,生成q轴补偿指令电压δvq*。
[0104]
在本实施例中,将由初始值设定部602设定的值设为初始值keh0-,但在控制上能够设定任意的值,也可以设定零。
[0105]
如图1所示,d轴以及q轴补偿指令电压δvd*、δvq*在加法部110中与d轴以及q轴指令电压vdc*、vqc*相加,生成补偿后的d轴以及q轴指令电压vdc**、vqc**。
[0106]
在图2中,在代替d轴以及q轴指令电压vdc*、vqc*而应用补偿后的d轴以及q轴指令电压vdc**、vqc**时,在永磁同步马达200内的加法部201a和201b中被相加的(p/2)
·
ωr
·
kehd以及(p/2)
·
ωr
·
kehq分别通过补偿后的d轴指令电压vdc**内的d轴补偿指令电压δ
=实际值vtd
‑”以及“设定值keh*-=实际值keh
‑”的方式进行控制。
[0120]
这样,本发明在由马达引起的感应电压失真和由逆变器引起的输出电压失真同时存在时,能够从检测电流中区分它们两个的影响,单独地推测关联参数并进行补偿(校正)。
[0121]
在图8中,使转矩脉动补偿部109和失效时间补偿部112的动作开始时间错开(t1≠t2),但也可以使这些补偿部的动作同时开始(t1=t2)。
[0122]
实施例2
[0123]
参照图9至图11,说明本发明的实施例2的马达驱动装置及其控制方法。
[0124]
在实施例1中,转矩脉动补偿部109和失效时间补偿部112进行动作,从而补偿图2中的由马达引起的感应电压失真和由逆变器引起的输出电压失真的影响(在加法部201a、201b和加法部202a、202b中相加的项被消除),被通电不包含脉动量idh、iqh的恒定的d轴以及q轴电流id-、iq-。即,通过使由于诸多要因而失真的电流波形接近理想的正弦波状,得到转矩脉动降低效果。
[0125]
但是,即使在图2中通电了恒定的d轴以及q轴电流id-、iq-,乘法部203、204中的由马达引起的感应电压失真的影响仍会残留,所以得到的转矩脉动降低效果受到限定(参照图8的转矩波形)。
[0126]
因此,为了补偿上述转矩脉动,也可以使用例如上述专利文献3公开的方法。即,也可以为了使转矩脉动抵消,特意地控制成使q轴电流脉动。
[0127]
图9是本实施例的马达驱动装置的结构图。在本结构中,将实施例1(图1)的结构中的转矩脉动补偿部109置换为转矩脉动补偿部109’。
[0128]
图10示出转矩脉动补偿部109’的结构。与实施例1(图1)的转矩脉动补偿部109的差异在于,被输入q轴检测电流iqc、和被附加有补偿电压运算部1000、lpf(低通滤波器)1002、乘法部1003、1004、1006、1007以及加法部1005、1008。
[0129]
lpf(低通滤波器)1002抽出q轴检测电流iqc的直流量,生成iqc-。
[0130]
向补偿电压运算部1000输入感应电压系数的失真分量的设定值keh*-、由lpf1002生成的iqc-、以及电角速度(p/2)
·
ωr*,根据以下的式(6),生成第一d轴补偿指令电压δvd1*-、第二d轴补偿指令电压δvd2*-、第一q轴补偿指令电压δvq1*-、第二q轴补偿指令电压δvq2*-。
[0131]
[数学式6]
[0132][0133]
针对作为补偿电压运算部1000的运算结果的δvd1*-、δvd2*-,分别在乘法部1003和乘法部1004中乘以sin6θdc和cos6θdc,生成δvd1*-·
sin6θdc和δvd2*-·
cos6θdc。之后,将这些运算结果在加法部1005中相加而生成d轴补偿指令电压δvd*。
[0134]
同样地,针对δvq1*-、δvq2*-,分别在乘法部1006和乘法部1007中乘以sin6θdc和cos6θdc,生成δvq1*-·
sin6θdc和δvq2*-·
cos6θdc。之后,将这些运算结果在加法部1008中相加而生成q轴补偿指令电压δvq*。
[0135]
在应用通过本实施例的结构而生成的d轴以及q轴补偿指令电压δvd*、δvq*时,在稳定状态下通电式(7)所示的q轴电流。
[0136]
[数学式7]
[0137][0138]
通过通电包含式(7)所示的脉动量的q轴电流,相对于实施例1的结构,能够以比值“δkeh-/ke”降低转矩脉动。
[0139]
图11是示出本实施例的动作波形的图。动作条件与图8所示的实施例1的情况相同,不同的点仅在于转矩脉动补偿部109被置换为转矩脉动补偿部109’。在与作为实施例1的动作波形的图8比较时,转矩以及电流波形不同。在本实施例中,在时刻t1《t时特意地通电含有脉动量的q轴电流iq,可知得到了更高的转矩脉动降低效果。
[0140]
这样,在本实施例中,即使在存在由逆变器引起的输出电压失真的条件下,也能够根据检测电流来推测感应电压系数的失真分量keh-,基于所得到的keh-而特意地通电脉动电流,从而能够更有效地抵消转矩脉动。
[0141]
实施例3
[0142]
参照图12至图14,说明本发明的实施例3的马达驱动装置及其控制方法。
[0143]
如上所述,由逆变器引起的输出电压失真在非通电轴侧显著地出现。由此,如果能够观测电流矢量的朝向来掌握通电轴和非通电轴的朝向,则即使在其它通电条件下也能够实现与实施例1、2同样的控制动作。
[0144]
在此,将d轴电流id和q轴电流iq所成的角度定义为电流相位β(=tan-1(-id/iq))。图12示出在将电流相位β设定为45
°
的情况下的电流矢量i’、由马达引起的感应电压失真的轨迹x’、以及由逆变器引起的输出电压失真的轨迹y’。
[0145]
如果与仅通电q轴电流的图4的实例比较,则可知轨迹x和x’相同,由马达引起的感应电压失真的影响不依赖于电流。另一方面,轨迹y和y’相互不同,由逆变器引起的输出电压失真的影响随着电流矢量的朝向而变化。在将电流矢量的朝向、即通电方向设为δ轴、并将使相位按顺时针偏移90
°
得到的非通电方向设为γ轴时,由逆变器引起的输出电压失真的影响在γ轴上显著地出现。
[0146]
图13是本实施例的马达驱动装置的结构图。在本结构中,考虑电流矢量的朝向和由逆变器引起的输出电压失真的影响的关系,将实施例1(图1)的结构中的脉动电流检测部116置换为脉动电流检测部116’。在本实施例(图13)中,成为包括转矩脉动补偿部109的结构,但也可以成为置换为实施例2所示的转矩脉动补偿部109’的结构。
[0147]
图14示出脉动电流检测部116’的结构。与实施例1(图5)的脉动电流检测部116的差异在于,附加有电流相位运算部1400、dq/γδ变换部1401以及加法部1402。
[0148]
电流相位运算部1400根据d轴以及q轴检测电流idc、iqc,运算电流相位β“tan-1(-idc/iqc)”。dq/γδ变换部1401根据电流相位β,运算以下的式(8)。
[0149]
[数学式8]
[0150][0151]
通过式(8)的运算,电流矢量被分离为作为非通电方向的γ轴分量和作为通电方向的δ轴分量。γ轴检测电流iγc在乘法部1405中与cos6θdc’相乘,经由lpf502生成电流脉动的第二分量ih2-。同样地,δ轴检测电流iδc在乘法部1406中与sin6θdc’相乘,经由lpf505生成电流脉动的第一分量ih1-。
[0152]
在脉动电流检测部116’中生成电流脉动的第一分量ih1-以及第二分量ih2-之后的动作与实施例1以及实施例2相同。
[0153]
实施例4
[0154]
参照图15,说明本发明的实施例4的空气调节器的室外机。图15示出将上述实施例1至实施例3中的任意实施例的实施方式所涉及的马达驱动装置应用于在空气调节器的室外机中搭载的风扇马达系统的例子。
[0155]
室外机1500搭载风扇马达用驱动装置1501、压缩机马达用驱动装置1502、风扇马达1503、风扇1504、框架1505以及压缩机装置1506。风扇马达用驱动装置1501是上述实施例1至实施例3中的任意实施例的实施方式所涉及的马达驱动装置。
[0156]
说明室外机1500中的风扇马达系统的动作。交流电源1507与压缩机马达用驱动装置1502连接。压缩机马达用驱动装置1502将供给的交流电压vac整流为直流电压vdc,驱动压缩机装置1506。
[0157]
同时,压缩机马达用驱动装置1502对风扇马达用驱动装置1501也供给直流电压vdc,还输出马达速度指令ωr*。
[0158]
风扇马达用驱动装置1501根据输入的马达速度指令ωr*而进行动作,将三相电压供给到风扇马达1503。由此,风扇马达1503进行驱动,所连接的风扇1504进行旋转。以上是风扇马达系统的动作。
[0159]
在空气调节器的室外机中,为了低成本化,一般是在风扇马达用驱动装置1501中搭载廉价的运算装置。另外,在风扇马达1503中未附加位置传感器的情况较多。即便是这样的用途,通过将本发明所涉及的马达驱动装置用作风扇马达用驱动装置,能够实现转矩脉动抑制控制。其结果,由风扇马达1503引起的向框架1505的振动被降低,能够降低从室外机单元1500释放的噪音。
[0160]
本发明所涉及的马达驱动装置不需要预备试验、调整作业等,所以应用非常容易。另外,由于是自主的转矩脉动抑制控制,所以针对马达特性难以测定的既有的设备也能够应用本发明。
[0161]
此外,实施例1至实施例3的实施方式所涉及的马达驱动装置还能够用作压缩机马达用驱动装置。总之,只要是以矢量控制为基本结构的马达驱动装置,就能够应用本发明。
[0162]
另外,在实施例1至实施例3的实施方式中,以基于无位置传感器方式的马达驱动装置为例而进行了说明,但在具备编码器、解析器、磁极位置传感器等位置传感器的马达驱动装置中也能够应用本发明。例如,即使设为对图1、图9、图13所示的马达101附加位置传感器、并对控制部103附加基于位置传感器的信息的速度反馈控制的结构,也能够应用本发明。
[0163]
另外,即使代替图1、图9、图13的各指令电压运算部107而设为包括基于d轴指令电
流id*与d轴检测电流idc的偏差以及q轴指令电流iq*与q轴检测电流iqc的偏差来实施的电流反馈控制的结构,也能够应用本发明。
[0164]
在该情况下,将构筑的电流反馈控制的响应频带设计成比由马达引起的感应电压失真、由逆变器引起的输出电压失真的变动频率充分低。由此,d轴以及q轴检测电流idc、iqc中包含的信息与实施例1至实施例3的实施方式相同,能够实现本发明所涉及的恰当的动作。
[0165]
在实施例1至实施例3中,说明为由马达引起的感应电压失真和由逆变器引起的输出电压失真以6次周期进行变动,但即使在变动周期成为6次以外(12次、24次等)的情况下也能够同样地应用本发明。
[0166]
另外,根据本发明的各实施例,是如下控制:根据作为检测信号之一的d轴以及q轴检测电流,检测由马达引起的感应电压失真以及由逆变器引起的输出电压失真的影响而进行补偿。通过并非使用指令信号而是使用检测信号,能够尽可能排除模型化误差、计算误差等的影响,高精度地进行上述控制。
[0167]
在使用检测信号的情况下,伴随着传感器等的追加而成本可能会增加,但马达驱动装置在大部分的情况下具备电流传感器。即,本发明仅利用既有传感器来实现自主地动作的转矩脉动抑制控制。
[0168]
此外,本发明不限于上述实施例,而包括各种变形例。例如,上述实施例是为了有助于理解本发明而详细说明的例子,不限定于一定具备所说明的所有结构。另外,能够将某个实施例的结构的一部分置换为其它实施例的结构,并且还能够对某个实施例的结构添加其它实施例的结构。另外,针对各实施例的结构的一部分,能够进行其它结构的追加、去除、置换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1