DC链路的没有中点连接的并联NPC三电平逆变器的制作方法
dc链路的没有中点连接的并联npc三电平逆变器
技术领域
1.本公开的实施例总体上涉及电场领域,并且具体地涉及一种没有中点连接的并联三电平逆变器。
背景技术:
2.ac三相变流器越来越多地采用三电平变流器拓扑结构,因为它们提供了总体增加的密度和减少的损耗。然而,dc母线的附加电压电平确实增加了附加的复杂程度。
3.对于典型的dc-ac逆变器应用,功率流不需要附加的dc中点,并且因此中点通常不会从逆变器中引出。dc中点确实需要特别考虑,并且可能需要控制以保持其电压平衡。
4.当变流器并联时,由于变流器可能在物理上分离的外壳中,因此希望只需要为承载电流的点提供互连电缆,并且因此优选的是,不需要dc中点互连,因为在正常操作条件下,该线不承载任何电流。
5.对于并联变流器应用,互连dc中点的要求是不期望的,原因有若干。例如,dc中点互连在正常情况下不承载任何电流,但是,任何电缆都必须针对故障情况进行过电流保护和防护(armored)。此外,每个并联变流器可以在其自己的单独外壳中,因此dc中点的互连需要每个变流器之间的附加连接器和电缆,这既不方便又会产生附加成本。
6.目前用于单个三电平变流器的dc中点的管理和平衡是众所周知的。有很多控制技术可用,它们允许通过使用dc与ac之间的共模(也称为零序)电压来主动平衡dc中点,这是在基频或谐波频率下实现,或者通过利用冗余pwm开关矢量实现。
7.常规技术仅适用于具有单个公共互连dc中点的单个或并联变流器。这样做的原因是,如果dc中点保持断开连接,则试图平衡局部中点的最新控制方法进而不平衡相邻中点。
8.因此,需要一种没有dc中点互连的并联三电平逆变器。
技术实现要素:
9.总体上,本公开的示例实施例提供了一种没有中点连接的并联三电平逆变器。
10.在第一方面,提供了一种并联三电平逆变器,该并联三电平逆变器包括:并联耦合在公共dc母线与公共ac输出之间的多个并联变流器,其中多个并联变流器中的每个变流器包括中点,并且多个并联变流器的中点彼此断开连接。
11.在第二方面,提供了一种用于在没有dc中点连接的并联三电平逆变器中使用的方法。该方法包括:确定逆变器的多个并联变流器的上半部dc母线电压的第一平均值和多个并联变流器的下半部dc母线电压的第二平均值;基于第一平均值、第二平均值和用于变流器的ac电压参考来确定用于多个并联变流器中的每个变流器的调制指数,使得多个变流器的上半部dc母线电压彼此相等并且多个变流器的下半部dc母线电压彼此相等;以及基于调制指数执行零序控制以使上半部dc母线电压的第一平均值等于下半部dc母线电压的第二平均值。
12.应当理解,发明内容部分并非旨在标识本公开的实施例的关键或基本特征,也不
旨在用于限制本公开的范围。通过以下描述,本公开的其他特征将变得容易理解。
附图说明
13.通过在附图中对本公开的一些实施例的更详细的描述,本公开的上述和其他目的、特征和优点将变得更加明显,在附图中:
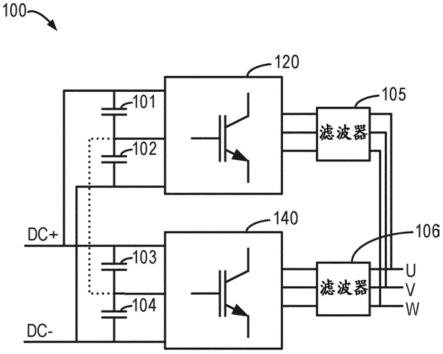
14.图1示出了图示根据本公开的实施例的没有中点互连的并联三电平逆变器的电路图;
15.图2示出了图示根据本公开的实施例的用于在并联三电平逆变器中使用的方法的流程图;
16.图3示出了根据本公开的一个实施例的dc母线去耦块;以及
17.图4示出了根据本公开的另一实施例的dc母线去耦块。
18.在整个附图中,相同或相似的附图标记表示相同或相似的要素。
具体实施方式
19.现在将参考一些示例实施例来描述本公开的原理。应当理解,这些实施例的描述仅是为了说明和帮助本领域技术人员理解和实现本公开,并不表示对本公开的范围的任何限制。本文中描述的公开可以以除了下面描述的方式之外的各种其他方式来实现。
20.如本文中使用的,术语“包括”及其变体应当理解为表示“包括但不限于”的开放术语。“基于”一词应当理解为“至少部分基于”。术语“一个实施例”和“实施例”应当理解为“至少一个实施例”。术语“另一实施例”应当理解为“至少一个其他实施例”。下面可以包括其他定义(明确的和隐含的)。
21.图1示出了图示根据本公开的一些实施例的没有中点互连的并联三电平逆变器100的电路图。并联三电平逆变器100耦合到dc母线,包括正电源轨dc+和负电源轨dc-。并联三电平逆变器100将dc母线上的dc电压转换为ac输出电压,包括三相u、v、w。并联三电平逆变器100包括第一三电平变流器120和第二三电平变流器140。应当理解,并联三电平逆变器100可以包括多于两个的三电平变流器。
22.如图1所示,上部dc母线电容器101和下部dc母线电容器102跨dc母线耦合,并且第一dc中点(上部dc母线电容器101和下部dc母线电容器102的公共节点)耦合到第一三电平变流器120。此外,上部dc母线电容器103和下部dc母线电容器104跨dc母线耦合,并且第二dc中点(上部dc母线电容器103和下部dc母线电容器104的公共节点)耦合到第二三电平变流器140。第一dc中点未耦合到第二dc中点,如图1中的虚线所示。
23.第一三电平变流器120的输出耦合到滤波器105,滤波器105耦合到ac输出。第二三电平变流器140的输出耦合到滤波器106,滤波器106也耦合到ac输出。
24.理想地,期望在逆变器100中进行相对于彼此的主动平衡(即,局部平衡)和全局主动平衡两者。然而,在实践中,这是无法做到的。用于主动平衡的唯一“杠杆”是调制指数上的电压偏移(通常称为共模或零序电压)。这可以用来实现全局主动平衡,但通常不是相对于彼此的主动平衡。它不能相对于彼此使用的主要原因是,因为变流器并联连接在一起(输入和输出绑定在一起),所以变流器应当不具有不同的共模电压。
25.相反,本公开的实施例有利地实现了相对于彼此的自然平衡以及全局主动平衡。
这种方法在任何意义上都是理想的。例如,可以使用全局主动平衡,这允许在很多应用中使用并联变流器,然后变流器间(相对于彼此)可以使用简单(非额外控制)自然平衡。
26.图2示出了图示用于在并联三电平逆变器100中使用的方法200的流程图。方法200可以在单个公共控制器处实现,也可以在并联三电平逆变器100的每个变流器处实现。现在参考单个公共控制器,并且应当理解,方法200也可以应用于其他控制器布置。
27.在框202,公共控制器确定逆变器100的并联变流器的上半部dc母线电压的第一平均值和逆变器100的并联变流器的下半部dc母线电压的第二平均值。例如,每个变流器120、140可以用电压传感器测量其上半部dc母线和下半部dc母线。公共控制器可以通信耦合到每个变流器并且从变流器获取电压测量结果以计算平均值。每个变流器可以接收在公共控制器处计算的第一平均值和第二平均值。替代地,每个变流器可以接收每个其他变流器的半部dc母线电压并且在局部执行平均。
28.在逆变器100的情况下,逆变器100的并联变流器的上半部dc母线电压的第一平均值是第一变流器120的上半部dc母线电压和第二变流器140的上半部dc母线电压的平均值。在逆变器100的情况下,逆变器100的并联变流器的下半部dc母线电压的第二平均值是第一变流器120的下半部dc母线电压和第二变流器140的下半部dc母线电压的平均值。
29.在框204,逆变器100的每个变流器基于第一平均值、第二平均值和变流器的ac电压参考来确定调制指数,使得多个变流器的上半部dc母线电压彼此相等并且多个变流器的下半部dc母线电压彼此相等。以这种方式,每个变流器使用平均的半部dc母线电压使其pwm输出电压去耦,并且“自然”dc中点平衡被实现。通过使用平均半部dc母线进行去耦,如果一个变流器具有不同于全局平均不平衡的局部dc中点不平衡,则它将经历局部“自然”dc中点平衡,但仅相对于其他并联变流器。
30.去耦的关键点是pwm参考(调制指数)只是ac输出电压与dc母线电压的比值。如果希望产生特定ac电压,则必须对dc母线电压进行去耦。例如,对于简单的两电平变流器,如果dc母线电压是100v,并且如果输出ac电压是峰峰电压为100v的正弦波,则调制指数等于1.0。如果dc母线电压增加到125v,但需要相同输出电压,则调制指数应当重新计算为100v/125v=0.8。
[0031]vupper
和v
lower
分别是测量的上半部母线电压和下半部母线电压。上半部母线电压和下半部母线电压的总和为总的或总和母线电压。中点不平衡是关于平衡电压将是什么而引入的。当上半部母线和下半部母线相等时,就是平衡的中点电压。母线半部电压平均值可以称为v
upper_avg
和v
lower_avg
。
[0032]“局部中点不平衡”是指变流器的实际中点电压与总的母线电压的一半的偏差。从数学上讲,v
bustotal
=v
lower
+v
upper
并且v
unbalance
=v
lower-(v
bustotal
/2)
[0033]
例如,如果v
lower
=2v并且v
upper
=1v,则v
bustotal
=3v。中点是不平衡的,因为v
lower
大于v
upper
。v
unbalance
=2-(3/2)=0.5v。
[0034]
在一个示例中,两个变流器相对于彼此不平衡,但全局平衡:v
upper_1
=1v,v
lower_1
=2v,v
upper_2
=2v,v
lower_2
=1v。这里,v
total
=3v。“上部母线电压平均值”是1.5v=v
upper_avg
=(v
upper_1
+v
upper_2
)/2。“下部母线电压平均值”也是1.5v=v
lower_avg
=(vlower_1+v
lower_2
)/2。平均母线半部是相等的,并且因此变流器是全局平衡的。个体变流器半部相对于彼此不平衡,因为其个体上(和下)半部电压与平均值不同。
[0035]
在另一示例中,两个变流器相对于彼此平衡,但全局不平衡:v
upper_1
=1v,v
lower_1
=2v,v
upper_2
=1v,v
lower_2
=2v。同样,v
total
=3v。v
upper_avg
=1v,v
lower_avg
=2v。平均母线半部不同,并且因此变流器全局不平衡。个体上半部变流器与平均值相同:v
upper_1
=v
upper_2
=v_upper_avg,并且v
lower_1
=v
lower_2
=v
lower_avg
。因此,变流器局部平衡。
[0036]
术语“自然dc中点平衡,但仅相对于其他并联变流器”是指使用相对于彼此而非全局的自然平衡。因此自然平衡将导致v
lower_1
=v
lower_2
=v
lower_avg
并且v
upper_1
=v
upper_1
=v
upper_avg
。但是自然平衡没有用于全局平衡。
[0037]
图3示出了根据本公开的实施例的dc母线去耦10的框图。ac电压参考11被提供给两个限幅器12和13。限幅器12的下限为零,并且限幅器13的上限为零。电压17是变流器的上半部dc母线电压的第一平均值,并且电压18是变流器的下半部dc母线电压的第二平均值。如果ac电压参考11大于零,则ac电压参考11将经由限幅器12被提供给除法器14,除法器14将正ac电压参考除以电压18。如果ac电压参考11小于零,则ac电压参考11将经由限幅器13被提供给除法器15,除法器15将负ac电压参考除以电压17。除法器14和15的输出在加法器16处相加以获取用于在控制变流器时使用的调制指数。
[0038]
图4示出了根据本公开的实施例的dc母线去耦20的框图。电压24是变流器的上半部dc母线电压的第一平均值,并且电压25是变流器的下半部dc母线电压的第二平均值。电压24和25在加法器23处相加成为总和电压。ac电压参考21和总和电压被提供给除法器22,除法器22将ac电压参考21除以总和电压以获取用于在控制变流器时使用的调制指数。
[0039]
虽然每个变流器的中点相对于平均中点平衡存在自然平衡,但平均去耦仍然导致没有总体平均中点平衡,并且因此需要全局中点平衡控制机制。为此,在框206,可以基于调制指数执行零序控制,以使上半部dc母线电压的第一平均值等于下半部dc母线电压的第二平均值。例如,总体中点控制器基于平均dc母线中点不平衡来实现,并且来自平衡控制器的参考被平均分配给所有变流器。全局主动平衡控制器只能改变共模电压。共模电压是所有3个三相电压参考的总和。通常,这个电压为零。在3线ac系统中,功率在3相之间传输,并且共模电压不会影响操作,因为没有共模电流路径。
[0040]
平衡控制器可以在单个控制器中实现,并且然后其参考被分配给每个变流器。传统中点平衡控制算法可以用于全局dc中点平衡。并联变流器可以用于高可靠性应用中,其中并联组中的变流器中的一个变流器的损耗是可以容忍的。仅当系统的一个部分(例如,变流器中的一个变流器)的损耗不会停止其余部分时,冗余才有效。在这种情况下,单点故障是不能容忍的,并且控制器可以在每个变流器中被复制。
[0041]
根据本公开的实施例,允许相对于彼此的自然平衡(自然平衡没有个体去耦)但随后用于全局主动平衡(其确实需要个体去耦)的方式是使每个变流器将其电压参考不是与其测量的dc母线半部局部地去耦,而是与平均dc母线半部局部地去耦。例如,如果一个变流器的上半部dc母线低于平均上半部dc母线,则当该变流器通过上半部平均dc母线进行去耦时,实际上会通过错误的电压进行去耦(因为其上半部dc母线低于平均值),并且因此将实现自然平衡。但是因为所有变流器都通过平均值去耦,所以在平均值上操作的任何主动平衡(即,全局平衡)都将能够平衡全局。以这种方式,方法200实现变流器间中点平衡(使用自然平衡)并且允许全局主动平衡并且不必连接并联变流器的中点。
[0042]
在一些实施例中,每个变流器可以测量多个并联变流器中的每个并联变流器的零
序电流并且将零序电流控制为零。换言之,每个变流器在局部尝试使用局部反馈控制器消除任何零序电流。零序电流会导致不平衡,因此消除任何错误的零序电流去除了中点不平衡的来源。
[0043]
根据本公开的实施例,每个变流器通过dc母线半部平均值来将dc母线电压去耦,以允许使用主动全局平衡并且依赖于自然平衡来实现变流器间平衡。好处是很清楚的,因为在每个变流器dc中点之间不需要电缆连接,从而降低了系统布线成本和复杂性。该方法已经被证明对组件变化的实际现实和并联变流器的感测误差不敏感。此外,本公开的实施例能够在没有连接dc中点的情况下实现并联三电平变流器的四象限操作。
[0044]
尽管本公开已经以特定于结构特征和/或方法动作的语言进行了描述,但是应当理解,在所附权利要求中定义的本公开不一定限于上述特定特征或动作。相反,上述具体特征和动作被公开作为实现权利要求的示例形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1