机器人控制系统、机器人控制方法和机器人与流程
本公开的示例性实施例总体上涉及机器人控制领域,更具体地涉及机器人控制系统、机器人控制方法和机器人。
背景技术:
1、机器人控制系统是根据指令和传感器信息来控制机器人完成一定动作或任务的设备。机器人控制系统是机器人的心脏并且决定着机器人的性能。
2、图1示出了了传统机器人控制系统的框图。如图1所示,机器人控制系统100一般包括用于执行机器人的运动控制的运动控制器101、用于执行机器人的安全控制的安全控制器102、用于将ac功率转换成dc功率的整流器103、以及用于执行机器人的电机控制的电机驱动器104。传统上,运动控制器101、安全控制器102和电机驱动器104具有大量的计算单元以便执行对应的控制。与此相反,传统的整流器103通常由诸如二极管之类的无源器件构成,并且几乎不需要计算单元。
3、随着更先进的功率半导体器件的发展,如开关损耗低于硅基半导体器件的sic和gan,有源整流器控制在机器人控制系统中变得越来越可行。有源整流器控制需要计算单元。此外,随着整流器103的控制和开关频率的增加,有源整流器控制中将需要具有更高性能的计算单元。有源整流器控制的通常解决方案是用mcu/dsp/dsc制作单独的整流器控制单元来实现这样的控制功能。
4、然而,有源整流器控制的传统解决方案有几个缺点。首先,单独的整流器控制单元中的mcu/dsp/dsc的计算能力是有限的,降低了机器人控制系统100的性能。其次,出于监管的目的,在运动控制器101与单独的整流器控制单元之间可能存在额外的有线通信链路和/或io(输入/输出)链路,而这将导致机器人控制系统100的结构复杂且成本高。第三,安全控制器102应具有在紧急情况或其它情况下切断机器人电源的能力,这需要安全控制器102与单独的整流器控制单元之间的交互。现在这种交互是通过使用低通信速度的离散io终端来实现的。第四,由于机器人控制系统100中的直流总线的控制是基于反馈的,所以单独的整流器控制单元的控制性能较低,这导致直流总线上的电压波动较大。
5、因此,需要一种用于机器人控制的改进的解决方案。
技术实现思路
1、鉴于上述问题,本公开实施例提供了一种高效、低成本且可靠的机器人控制解决方案。
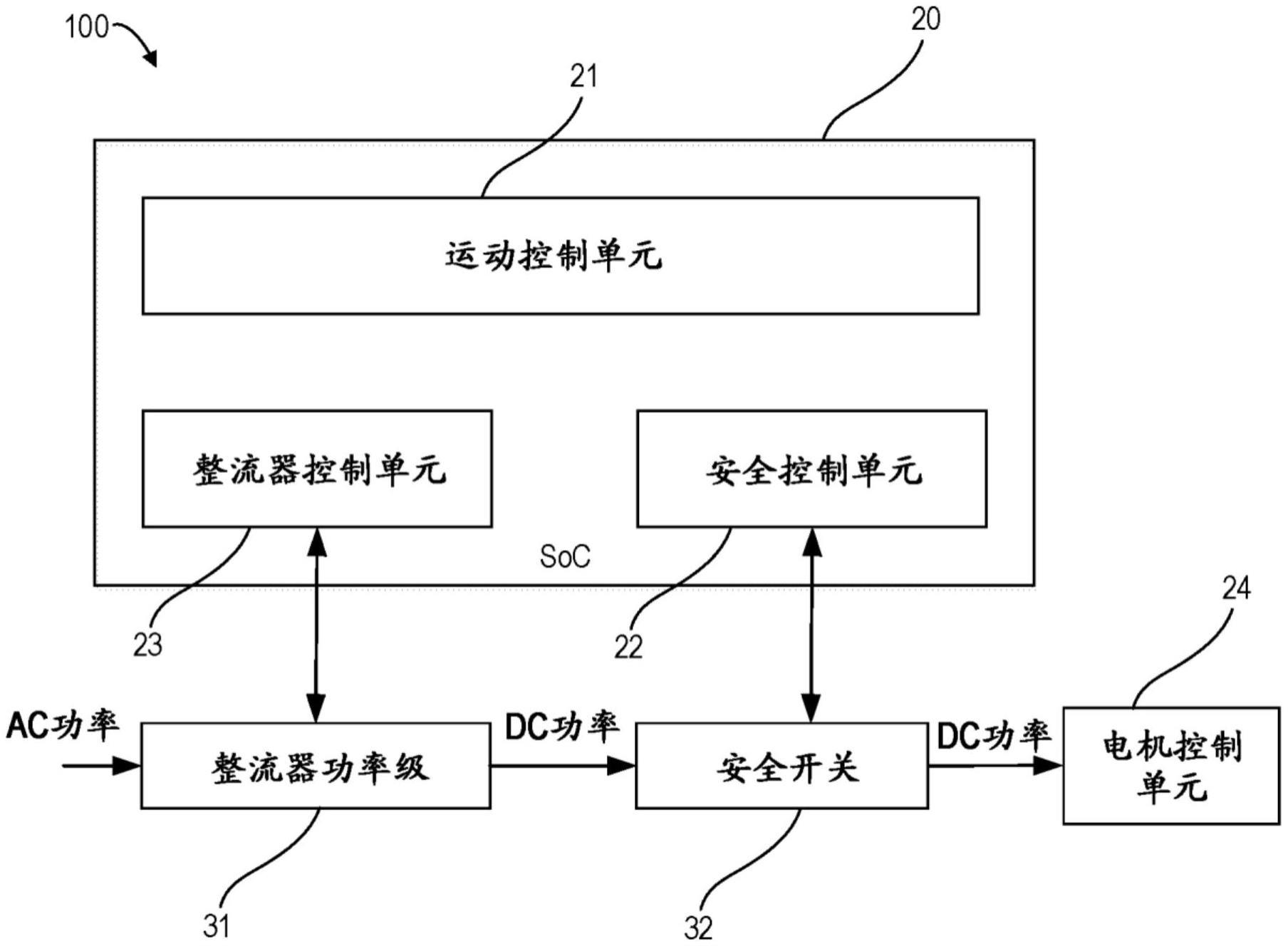
2、第一方面,本公开实施例提供一种机器人控制系统,包括:运动控制单元,其被配置为执行机器人的运动控制;包括ac-dc控制单元的整流器控制单元,该ac-dc控制单元被配置为生成用于驱动整流器功率级的整流器控制信号,整流器功率级,其被配置为将来自电网的ac功率转换成dc功率;安全控制单元,其被配置为基于机器人的操作状态或用户输入来生成用于选择性地接通或关断连接到整流器功率级的输出的安全开关的安全控制信号;以及电机控制单元,其被配置为基于经由安全开关接收到的dc功率来执行机器人的电机控制,其中运动控制单元、整流器控制单元和安全控制单元被集成在相同芯片中。
3、根据本公开的实施例,集成在相同芯片中的运动控制单元、整流器控制单元和安全控制单元将使用片上数据总线进行监管,移除了在整流器控制单元和其它控制单元之间的有线通信链路和/或io链路。以这种方式,能够提高机器人控制系统的性能,降低机器人控制系统的成本。此外,由于集成了运动控制单元、整流器控制单元和安全控制单元的芯片的计算能力远高于mcu/dsp/dsc,因此在整流器控制单元中可以支持更高的开关频率。此外,将运动控制单元、整流器控制单元和安全控制单元集成在相同芯片中将减小机器人控制系统的整体尺寸并节省机器人的空间。
4、在一些实施例中,运动控制单元、整流器控制单元、安全控制单元和电机控制单元被集成在相同芯片中。通过这些实施例,将电机控制单元集成在相同芯片中将进一步减小机器人控制系统的整体尺寸并节省机器人中的空间。
5、在一些实施例中,机器人控制系统还包括缓存,该缓存被设置在相同芯片上并且耦合至运动控制单元、整流器控制单元和安全控制单元,其中运动控制单元、整流器控制单元和安全器控制单元经由缓存来执行数据传输。通过这些实施例,整流器控制单元和其它控制单元之间可以经由高速缓存以高速和可靠的方式交换各种信息。
6、在一些实施例中,ac-dc控制单元还被配置为从运动控制单元接收功率消耗预测信号并基于功率消耗预测信号来调整整流器控制信号。通过这些实施例,ac-dc控制单元可以基于功率消耗预测信号来动态地调整整流器控制信号,从而为机器人提前准备合适的电量。这样,能够降低由整流器功率级输出的电压的波动。
7、在一些实施例中,整流器控制单元还包括电网监管单元,其被配置为监测电网质量,并将表示电网质量的信息发送给运动控制单元。通过这些实施例,可以实时监测电网的质量以供进一步使用。
8、在一些实施例中,电网质量包括电压骤降、电压畸变和电压波动中的至少一项。
9、在一些实施例中,整流器控制单元还包括功率级监管单元,其被配置为监测整流器功率级的操作状况,并将表示整流器功率级的操作状况的信息发送给运动控制单元。通过这些实施例,可以实时监测整流器功率级的操作状况以便执行预测性维护。
10、在一些实施例中,整流器控制单元还包括dc-ac控制单元,其被配置为将dc功率转换为单相ac功率供现场使用。
11、在一些实施例中,安全控制单元被配置为响应于以下中的至少一项而关断安全开关:电网中或整流器功率级中发生严重错误;机器人的移动速度超过预定义的速度阈值;机器人超出预定义的位置范围;以及用户输入是紧急停止信号。通过这些实施例,安全开关可以在机器人发生紧急情况时或响应于用户的输入而及时关断。
12、在第二方面,本公开实施例提供一种机器人,包括根据本公开第一方面的机器人控制系统。
13、在第三方面,本公开实施例提供一种机器人控制方法,包括:由运动控制单元执行机器人的运动控制;由整流器控制单元的ac-dc控制单元生成用于驱动整流器功率级的整流器控制信号,该整流器功率级被配置为将来自电网的ac功率转换成dc功率;由安全控制单元基于机器人的操作状态或用户输入来生成用于选择性地接通或关断连接到整流器功率级的输出的安全开关的安全控制信号;并且由电机控制单元基于经由安全开关接收到的dc功率来执行机器人的电机控制,其中运动控制单元、整流器控制单元和安全控制单元被集成在相同芯片中。
14、在一些实施例中,该方法还包括:由ac-dc控制单元接收来自运动控制单元的功率消耗预测信号;并且由ac-dc控制单元基于功率消耗预测信号来调整整流器控制信号。
15、在一些实施例中,该方法还包括:由整流器控制单元的电网监管单元监测电网质量;并且由电网监管单元将表示电网质量的信息发送给运动控制单元。
16、在一些实施例中,该方法还包括:由整流器控制单元的功率级监管单元监测整流器功率级的操作状况;并且由功率级监管单元将表示整流器功率级的操作状况的信息发送给运动控制单元。
17、在一些实施例中,安全控制单元被配置为响应于以下中的至少一项而关断安全开关:在电网中或整流器功率级中发生严重错误;机器人的移动速度超过预定义的速度阈值;机器人超出预定义的位置范围;以及用户输入是紧急停止信号。
- 还没有人留言评论。精彩留言会获得点赞!