一种基于抗扰控制的自适应双电机消隙控制方法
1.本发明属于双电机消隙控制技术,具体为一种基于抗扰控制的自适应双电机消隙控制方法。
背景技术:
2.由永磁电机与减速器等传动机构组成的电动伺服系统广泛应用于工业伺服和军工产品。由于减速器等机构存在传动间隙,负载端位置反馈与电机轴位置存在死区,在死区范围内,电机转矩无法有效传递到负载侧,这一方面会降低传动效率,更重要的是会导致伺服控制到位误差增大,甚至在伺服到位后产生抖动、摇晃等低品质表现,因此消隙控制具有重要意义。
3.当前科研人员研究的消隙方法可分为两类:1、基于单电机的驱动控制方法,通过内模控制、滑模控制等控制方法与模型观测器相结合补偿由于气隙造成的到位误差和扰动。2、基于双电机的驱动控制方法,通过制造两台电机驱动过程中的不平衡转矩主动消除传动间隙。其中,单电机控制方法需要大量包括控制器参数、模型参数等需要整定和测量的参数支持,实际使用中非常不便,且在变参数、变环境状态下的抗扰能力差。双电机方法可以实现主动消隙,然而,不平衡消隙会造成系统形变,一方面,消隙产生的变形扭转力矩会造成额外负载,影响负载运动速度,另一方面,传动系统长期处于高度变形状态会加速疲劳、老化,进而影响寿命。
技术实现要素:
4.本发明的目的在于提供了一种基于抗扰控制的自适应双电机消隙控制方法。
5.实现本发明目的的技术方案为:一种基于抗扰控制的自适应双电机消隙控制方法,包括如下步骤:
6.步骤1,通过位移指令与编码器测量所得负载位移反馈计算得位移误差,位移误差经过比例环节生成电机速度环参考转;
7.步骤2,根据速度环速度反馈与参考转速计算规划未来n个采样周期参考转速轨迹,通过模型预测算法预测未来n个采样周期的转速预测值,并建立基于规划转速与预测转速差值的损失函数,通过搜索损失函数极值计算电流参考值;
8.步骤3,将参考电流与双电机转速作为扩展观测器输入,通过扩展观测器估计电机转矩扰动,并与电流参考值融合,输出参考电流;
9.步骤4,根据实测双电机传动间隙计算消隙电流,融合参考电与消隙电流,得到双电机参考电流;
10.步骤5,永磁同步电机电流控制器分别按照参考电流控制永磁电机1与永磁电机2电流,分别做i
d
=0控制,并把实测q轴电流反馈至模型预测控制器。
11.优选地,步骤2中未来n个采样周期参考转速轨迹ω
ref
(1)...ω
ref
(n)计算方法为:
12.ω
ref
(i)=ω
ref*
(0)
‑
α
ri
[ω
ref*
(0)
‑
ω(0)],i=1,2...n
[0013]
其中,ω
ref*
(0)为当前时刻电机速度环转速指令,t
s
是转速环采样时间,t
r
是速度环动态响应时间,ω(0)是初始时刻ω
ml
与ω
m2
的平均值。
[0014]
优选地,未来n个采样周期的预测转速值ω
p
(1)...ω
p
(n)计算方法为:
[0015][0016]
其中,t
e
=k
timpc
,k
t
是电流转矩系数,t
l
是负载转矩,j是系统机械惯量,ω
p
(0)是初始转速值。
[0017]
优选地,基于规划转速与预测转速差值的损失函数为:
[0018]
预测转速误差定义为e(i)=ω(i)
‑
ω
p
(i),ω(i)是第i步实际转速,ω
p
(i)是第i步预测转速,p是参数,i是变量,r是电机定子绕组,表示参考电流估计值;
[0019]
优选地,基于损失函数计算的模型预测电流参考值i
mpc
为:
[0020][0021]
优选地,步骤3中的扩展观测器结构为:
[0022][0023]
其中,x1为转速ω
m1
与ω
m2
的转速平均值,x2为扰动,p为整定参数,b0为k
t
/j,表示转速平均值估计值,表示扰动估计值,k
t
是电流转矩系数,j是系统机械惯量。
[0024]
优选地,双电机参考电流分别为:
[0025][0026]
其中,
[0027]
式中,e
θ
为负载位置,ε为小误差带,k
anti
‑
lash
为消隙电流系数,δθ1、δθ2为电机1和电机2的电机轴和齿轮位移差。
[0028]
本发明具有以下有益效果:
[0029]
1)本发明中的动态消隙控制不影响伺服控制运动中执行时间,只在负载位置进入误差带以后执行,通过消除间隙抑制到位抖动,提高了到位精度;
[0030]
2)本发明引入实测间隙反馈调节消隙电流,能根据实际间隙自适应调节消隙电流,最终将消隙电流抑制在较小值,减小了消隙控制导致的扭转形变以及附加扭转转矩;
[0031]
3)本发明将扭转变形力矩、间隙传动特性引入模型预测观测器,从而加快扩展观测器的扰动辨识速度,提高伺服控制抗扰能力。
附图说明
[0032]
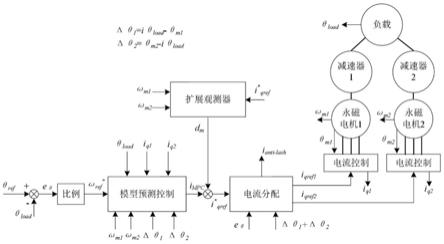
图1是本发明的基本原理图。
[0033]
图2是传动齿隙造成的传动死区特性。
[0034]
图3是采用常规消隙控制与没有消隙控制的伺服位置控制对比图。
[0035]
图4是采用常规消隙控制与本发明所提消隙控制的伺服位置对比图。
[0036]
图5是本发明消隙控制动态过程中传动间隙图。
具体实施方式
[0037]
下面结合附图对本发明作更进一步的说明。
[0038]
一种基于抗扰控制的自适应双电机消隙控制方法,具体步骤为:
[0039]
步骤1,参考转速计算:通过位移指令θ
ref
与编码器测量所得负载位移反馈θ
load
计算得位移误差e
θ
,误差经过比例环节生成电机速度环转速指令ω
ref*
。
[0040]
步骤2,速度环模型预测控制器:速度环速度反馈采用双电机转速ω
m1
与ω
m2
的转速平均值,根据速度反馈与参考转速ω
ref*
计算未来n个采样周期参考规划转速轨迹ω
ref
(1)...ω
ref
(n),通过模型预测算法预测未来n个采样周期的预测转速值ω
p
(1)...ω
p
(n),并建立基于规划转速与预测转速值差值的损失函数,通过搜索损失函数极值计算出的模型预测控制器的电流参考值i
mpc
。
[0041]
进一步,在所述步骤2中的未来n步参考规划转速轨迹ω
ref
(1)...ω
ref
(n)计算方法为:
[0042]
ω
ref
(i)=ω
ref*
(0)
‑
α
ri
[ω
ref*
(0)
‑
ω(0)],i=1,2...n其中,ω
ref*
(0)为当前时刻电机速度环转速指令,t
s
是转速环采样时间,t
r
是速度环动态响应时间,ω(0)是初始时刻ω
m1
与ω
m2
的平均值。
[0043]
未来n个采样周期的预测转速值ω
p
(1)...ω
p
(n)计算方法为:
[0044]
其中,t
e
=k
timpc
,k
t
是电流转矩系数,t
l
是负载转矩,j是系统机械惯量,ω
p
(0)是初始转速值。
[0045]
基于规划转速与预测转速值差值的损失函数为:
[0046]
其中“^”表示估计值,预测转速误差定义为e(i)=ω(i)
‑
ω
p
(i),ω(i)是第i步实际转速,ω
p
(i)是第i步预测转速,p是参数,i是变量,r是电机定子绕组,是参考电流估计值。
[0047]
基于上述损失函数极值计算出的模型预测电流参考值i
mpc
计算方法为:
[0048]
即在损失函数j
p
(i
mpc
)取得最小值时的电流参考值为i
mpc
。
[0049]
步骤3,扩展观测器抗扰控制:将参考电流i
*qref
与双电机转速ω
m1
与ω
m2
作为扩展观测器输入,通过扩展观测器估计电机转矩扰动d
m
,并与模型预测参考电流i
mpc
融合,输出参考电流i
*qref
。
[0050]
进一步,在所述步骤3中的扩展观测器结构为:
[0051]
其中x1为转速ω
m1
与ω
m2
的转速平均值,x2为扰动,p为整定参数,b0为k
t
/j,表示转速平均值估计值,表示扰动估计值。
[0052]
步骤4,电流分配器:根据实测双电机传动间隙计算消隙电流,融合参考电流与消隙电流,得到双电机参考电流;
[0053]
在负载位置(e
θ
)进入小误差带(ε)之前(e
θ
>ε)双电机参考电流i
qref1
与i
qref2
分别是参考电流i
*qref
的一半;在负载位置进入小误差带(e
θ
<ε),根据实测双电机传动间隙计算消隙电流i
anti
‑
lash
,消隙电流i
anti
‑
lash
起始值较大,最终减小至最小消隙电流值,该值是维持指定传动间隙b
dm
的最小值,b
dm
=b
dm1
+b
dm2
,其中b
dm1
+b
dm2
的定义见图2,此过程中双电机参考电流i
qref1
与i
qref2
分别由参考电流i
*qref
的与消隙电流i
anti
‑
lash
融合计算而得。
[0054]
进一步,在所述步骤4中,所述消隙控制的小误差(ε)是指,负载在运动过程中随着实际位置与理想位置之间的差值逐渐减小,负载位置会进入一个小误差带。在负载位置进入小误差带之前不做消隙控制,即永磁电机1和永磁电机2分配电流值相等,在负载位置进入小误差带时进行消隙控制。双电机参考电流分别为:
[0055][0056]
其中,
[0057]
式中,e
θ
为负载位置,ε为小误差带,k
anti
‑
lash
为消隙电流系数,δθ1、δθ2为电机1和电机2的电机轴和齿轮位移差。
[0058]
步骤5,电流控制器:永磁同步电机电流控制器分别按照参考电流i
qref1
与i
qref2
控制永磁电机1与永磁电机2电流,分别做id=0控制,并把实测q轴电流iq1与iq2反馈至速度环模型预测控制器。
[0059]
本发明只在负载到位时应用消隙控制,不影响运动过程中系统负载,且通过自适应消隙方法实现消隙电流最小化控制,在消除间隙的同时最大程度减小系统变形,降低变形扭转力矩。
[0060]
本发明通过在模型预测控制器的负载转矩中引入两路电机通过间隙作用的转矩、负载转矩、消隙造成的扭转负载转矩,可以加速扰动转矩估计的收敛速度。负载转矩定义为:
[0061]
t
l
=t
load
(θ
load
)+t
s1
(i
q1
,δθ1)+t
s2
(i
q2
,δθ2)+t
tor
(δθ1+δθ2)
[0062]
其中t
load
是负载运动中由于重力等运动场景产生的负载转矩,t
s1
与t
s2
是带有齿隙效应的传动力矩,t
tor
是由于消隙电流作用产生系统变形而生成的扭转负载力矩。
[0063]
在某些实施例中,本发明中扩展观测器所采用的速度反馈为两台电机的转速平均值。
[0064]
一种基于抗扰控制的自适应双电机消隙控制方法的效果,通过电流分配器设计,能够实现将消隙电流i
anti
‑
lash
控制到最小消隙电流值。
[0065]
某些实施例中,驱动两台额定转矩2.4nm永磁同步电机,通过两套传动比为20的减
速器,拖动一个惯量为0.1kg
·
m2的负载,在0.5s以内从0度运动到10度,到位误差在1密位以内。两套减速器无扭转变形的间隙之和为0.85度。
[0066]
图3是采取消隙控制与没有消隙控制的伺服位置控制对比图。不采用消隙控制的情况下,双电机驱动电流相等,负载无法准确到位,会在目标位置10度附近抖动;采用消隙控制以后,双电机驱动电流分别叠加恒定消隙电流,负载位置可以收敛到目标位置10度,误差在1密位以内。
[0067]
图4是采取现有消隙控制与本发明所提消隙控制的伺服位置对比图。采用现有消隙控制由于无法确定需要多大消隙电流,因此给定一个较大消隙电流保证消除间隙,虽然能够实现功能,但是会造成扭转形变;采用所提出消隙控制,消隙电流会动态变化,最终收敛到0.2a左右。
[0068]
图5是本发明消隙控制动态过程中传动间隙图。采用所提出消隙控制,间隙在到位过程中逐渐减小收敛到0.85度,等于两套减速器无扭转变形的间隙之和,即恰好处于传动死区边界上,此时气隙完全消除,而且不会产生扭转形变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1