逆变器的电流控制系统、电流控制方法及其设备与流程
1.本技术涉及电源技术领域,尤其是一种逆变器的电流控制系统、电流控制方法及其设备。
背景技术:
2.逆变器可以将直流电转换为交流电,广泛应用在电力系统中。电力系统要求逆变器可以具有一定的低电压穿越能力(low voltage ride through,lvrt)。换句话说,逆变器需要具有一定的电流耐受和电流限制能力,即使在电力系统发生故障,导致电力系统电压跌落、电流增大的情况下,逆变器依然可以正常工作,不被烧毁。
3.逆变器包含多个半导体器件例如金属氧化物半导体场效应管(metal-oxide-semiconductor field-effect transistor,mosfet)、绝缘栅双极型晶体管(insulated gate bipolar transistor,igbt)及其反并联二极管等。由于半导体器件的电流耐受能力普遍较低,因而为了使逆变器的lvrt可以满足电力系统的要求,目前主要重点研究如何控制逆变器的输出电流。
技术实现要素:
4.本技术提供了一种逆变器的电流控制系统、电流控制方法及其设备,可以控制逆变器的输出电流。
5.第一方面,本技术实施例提供了一种逆变器的电流控制系统,该电流控制系统包括直流电源、逆变器、交流负载以及控制器,其中该逆变器的输入端耦合上述直流电源,该逆变器的输出端耦合上述交流负载,该逆变器的控制端耦合上述控制器;
6.该控制器,用于根据上述逆变器的参考电压参量获取该逆变器的第一驱动电压;该逆变器的参考电压参量为根据该逆变器的参考功率、该逆变器的实际输出功率以及功率与电压参量之间的映射关系确定的;
7.该控制器,还用于根据上述第一驱动电压以及上述逆变器的阻尼电压,确定上述逆变器的第二驱动电压;上逆变器的阻尼电压为根据上述逆变器的虚拟阻抗值以及上述逆变器当前的输出电流确定的;
8.该控制器,还用于根据上述第二驱动电压生成驱动信号,并向上述逆变器发送该驱动信号,该驱动信号用于控制上述逆变器的输出电流。
9.本技术实施例中,控制器通过逆变器当前的输出电流与虚拟阻抗值确定阻尼电压,将该阻尼电压与第一驱动电压进行相减,得到第二驱动电压,并基于该第二驱动电压生成驱动信号。实施本技术实施例,阻尼电压可以直接改变逆变器的驱动电压,从而生成新的驱动信号,控制逆变器的输出电流。
10.结合第一方面,在第一种可能的实现方式中,上述控制器,还用于根据上述逆变器的输出电压、上述逆变器的额定电压以及上述逆变器的预设功率,确定上述逆变器的参考功率。
11.本技术实施例增加了参考功率的确定,使得控制器在逆变器的输出电压低于预设电压阈值时,除了可以增加阻尼电压改变逆变器的驱动电压之外,还可以进一步地控制逆变器的参考功率,从而控制逆变器的输出电流。
12.结合第一方面或结合第一方面第一种可能的实现方式,在第二种可能的实现方式中,上述参考功率包括参考有功功率和参考无功功率,上述实际输出功率包括实际有功功率和实际无功功率;
13.上述参考电压参量包括参考电压幅值和参考电压频率;上述功率与电压参考参量之间的映射关系包括有功功率与电压频率之间的映射关系和无功功率与电压幅值之间的映射关系;
14.上述控制器,还用于根据上述参考有功功率、上述实际有功功率以及上述有功功率与电压频率之间的映射关系,确定上述逆变器的参考电压频率;
15.上述控制器,还用于根据上述参考无功功率、上述实际无功功率以及上述无功功率与电压幅值之间的映射关系,确定上述逆变器的参考电压幅值。
16.结合第一方面第二种可能的实现方式,在第三种可能的实现方式中,上述预设功率包括预设无功功率以及额定视在功率;
17.上述控制器,还用于根据上述逆变器的输出电压、上述逆变器的额定电压以及上述预设无功功率,确定上述逆变器的参考无功功率;
18.上述控制器,还用于基于上述逆变器的参考无功功率、上述逆变器的输出电压、上述逆变器的额定电压以及上述额定视在功率,确定上述逆变器的参考有功功率。
19.结合第一方面或结合第一方面上述任一种可能的实现方式,在第四种可能的实现方式中,上述控制器,还用于根据上述逆变器的参考电压参量以及上述逆变器的输出电压,确定上述逆变器的参考电流;
20.上述控制器,还用于根据上述逆变器的参考电流以及上述逆变器当前的输出电流,确定上述逆变器的第一驱动电压。
21.本技术实施例中,阻尼电压直接与第一驱动电压进行运算,逆变器的电流控制系统响应有效且快速。
22.结合第一方面或结合第一方面上述任一种可能的实现方式,在第五种可能的实现方式中,上述控制器,还用于根据上述逆变器当前的输出电流与第一预设电流阈值之间的差值以及第一预设阻抗值,确定上述虚拟阻抗值。
23.实施本技术实施例,虚拟阻抗值是跟随逆变器的输出电流的大小变化的,使得逆变器的第二驱动电压更加准确,适应性强。
24.结合第一方面或结合第一方面第一种可能的实现方式至结合第一方面第四种可能的实现方式中的任一种,在第六种可能的实现方式中,上述逆变器包括三相逆变器;
25.上述控制器,用于根据该三相逆变器中各相的第一驱动电压以及各相对应的阻尼电压,确定该三相逆变器中各相对应的第二驱动电压;其中该三相逆变器各相对应的阻尼电压为根据该三相逆变器中各相的虚拟阻抗值以及该三相逆变器中各相当前的输出电流确定的;
26.上述控制器,还用于根据上述三相逆变器中各相对应的第二驱动电压生成各个驱动信号,并向上述三相逆变器中的各相分别发送对应的各个驱动信号,该各个驱动信号分
别用于对应控制上述三相逆变器中每相的输出电流。
27.实施本技术实施例,可以独立对逆变器各相的输出电流进行判断,并且分别对逆变器各相的虚拟阻抗值进行计算,得到的结果更加准确,并且适用于逆变器各相发生不对成故障的场景,适用性更强。
28.结合第一方面第六种可能的实现方式,在第七种可能的实现方式中,上述控制器,还用于根据上述三相逆变器中各相当前的输出电流与上述三相逆变器每相对应的各个第二预设电流阈值之间的差值以及各个第二预设阻抗值,确定上述三相逆变器中各相的虚拟阻抗值。
29.结合第一方面第一种可能的实现方式至结合第一方面第七种可能的实现方式中的任一种,在第八种可能的实现方式中,上述逆变器的输出电压低于预设电压阈值。
30.第二方面,本技术实施例提供了一种逆变器的电流控制方法,该逆变器的输入端耦合直流电源,该逆变器的输出端耦合交流负载,该逆变器的控制端耦合电流控制器,该流控制方法适用于该控制器,包括:
31.根据上述逆变器的参考电压参量获取该逆变器的第一驱动电压;该逆变器的参考电压参量为根据该逆变器的参考功率、该逆变器的实际输出功率以及功率与电压参量之间的映射关系确定的;
32.根据上述第一驱动电压以及上述逆变器的阻尼电压,确定上述逆变器的第二驱动电压;上逆变器的阻尼电压为根据上述逆变器的虚拟阻抗值以及上述逆变器当前的输出电流确定的;
33.根据上述第二驱动电压生成驱动信号,并向上述逆变器发送该驱动信号,该驱动信号用于控制上述逆变器的输出电流。
34.结合第二方面,在第一种可能的实现方式中,上述逆变器的参考功率为根据上述逆变器的输出电压、上述逆变器的额定电压以及上述逆变器的预设功率确定的。
35.结合第二方面或结合第二方面第一种可能的实现方式,在第二种可能的实现方式中,上述参考功率包括参考有功功率和参考无功功率,上述实际输出功率包括实际有功功率和实际无功功率;
36.上述参考电压参量包括参考电压幅值和参考电压频率;上述功率与电压参考参量之间的映射关系包括有功功率与电压频率之间的映射关系和无功功率与电压幅值之间的映射关系;
37.上述逆变器的参考电压频率为根据上述参考有功功率、上述实际有功功率以及上述有功功率与电压频率之间的映射关系确定的;
38.上述逆变器的参考电压幅值根据上述参考无功功率、上述实际无功功率以及上述无功功率与电压幅值之间的映射关系确定的。
39.结合第二方面第二种可能的实现方式,在第三种可能的实现方式中,上述预设功率包括预设无功功率以及额定视在功率;
40.上述逆变器的参考无功功率为根据上述逆变器的输出电压、上述逆变器的额定电压以及上述预设无功功率确定的;
41.上述逆变器的参考有功功率为基于上述逆变器的参考无功功率、上述逆变器的输出电压、上述逆变器的额定电压以及上述额定视在功率确定的。
42.结合第二方面或结合第二方面上述任一种可能的实现方式,在第四种可能的实现方式中,
43.上述根据该逆变器的参考电压参量获取该逆变器的第一驱动电压具体实现为:
44.根据上述逆变器的参考电压参量以及上述逆变器的输出电压,确定上述逆变器的参考电流;
45.根据上述逆变器的参考电流以及上述逆变器当前的输出电流,确定上述逆变器的第一驱动电压。
46.结合第二方面或结合第二方面上述任一种可能的实现方式,在第五种可能的实现方式中,上述虚拟阻抗值为根据上述逆变器当前的输出电流与第一预设电流阈值之间的差值以及第一预设阻抗值确定的。
47.结合第一方面或结合第一方面第一种可能的实现方式至结合第一方面第四种可能的实现方式中的任一种,在第六种可能的实现方式中,上述逆变器包括三相逆变器;
48.上述根据上述第一驱动电压以及上述逆变器的阻尼电压,确定上述逆变器的第二驱动电压包括:
49.根据该三相逆变器中各相的第一驱动电压以及各相对应的阻尼电压,确定该三相逆变器中各相对应的第二驱动电压;其中该三相逆变器各相对应的阻尼电压为根据该三相逆变器中各相的虚拟阻抗值以及该三相逆变器中各相当前的输出电流确定的;
50.上述根据上述第二驱动电压生成驱动信号,并向所述逆变器发送该驱动信号具体实现为:
51.根据上述三相逆变器中各相对应的第二驱动电压生成各个驱动信号,并向上述三相逆变器中的各相分别发送对应的各个驱动信号,该各个驱动信号分别用于对应控制上述三相逆变器中每相的输出电流。
52.结合第二方面第六种可能的实现方式,在第七种可能的实现方式中,上述三相逆变器中各相的虚拟阻抗值为根据上述三相逆变器中各相当前的输出电流与上述三相逆变器每相对应的各个第二预设电流阈值之间的差值以及各个第二预设阻抗值确定的。
53.结合第二方面第一种可能的实现方式至结合第二方面第七种可能的实现方式中的任一种,在第八种可能的实现方式中,上述逆变器的输出电压低于预设电压阈值。
54.第三方面,本技术实施例提供了一种逆变器的电流控制器,该电流控制器包括:收发器、处理器和存储器,该收发器、该处理器和该存储器通过总线系统耦合;
55.该收发器用于接收逆变器当前的输出电流以及输出电压,并用于向该逆变器发送驱动信号;
56.该存储器用于存储指令;
57.该处理器用于调用上述存储器中存储的指令,执行上述第二方面或执行结合上述第二方面任意一种可能实现方式中的方法步骤。
58.应理解的是,本技术上述多个方面的实现和有益效果可互相参考。
附图说明
59.图1a为本技术实施例提供的一种单相逆变器的电流控制系统的结构框图;
60.图1b为本技术实施例提供的一种三相逆变器的电流控制系统的结构框图;
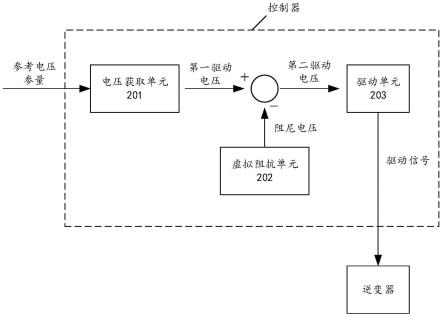
61.图2为本技术实施例提供的逆变器的电流控制器的一结构框图;
62.图3a为本技术实施例提供的有功功率与电压频率之间的下垂特性曲线;
63.图3b为本技术实施例提供的无功功率与电压幅值之间的下垂特性曲线;
64.图4为本技术实施例提供的虚拟阻抗的一计算示意图;
65.图5为本技术实施例提供的虚拟阻抗的又一计算示意图;
66.图6为本技术实施例提供的逆变器的电流控制器的又一结构框图;
67.图7为实施本技术实施例的效果示意图。
具体实施方式
68.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
69.下面结合图1a至图5来对本技术实施例的实施作进一步的详细描述。
70.首先参见图1a,图1a为本技术实施例提供的一种单相逆变器的电流控制系统的结构框图。如图1a所示,电流控制系统包括直流电源100、逆变器101a、交流负载102以及控制器103,其中逆变器101a的输入端耦合直流电源100,逆变器101a的输出端耦合交流负载102,逆变器101a的控制端耦合控制器103。
71.需要首先指出的是,本技术中所描述的“耦合”指的是直接或间接连接。例如,a与b连接,既可以是a与b直接连接,也可以是a与b之间通过一个或多个其它电学元器件间接连接,例如可以是a与c直接连接,c与b直接连接,从而使得a与b之间通过c实现了连接。
72.直流电源100用于向逆变器101a提供直流电,可以是光伏系统、电化学电池(如镍镉电池、镍氢电池、锂离子电池、锂聚合物电池等)或直流发电机等。
73.逆变器连接直流电源100与交流负载102,可以将直流电源100提供的直流电转换为交流电,并将该交流电向交流负载102提供。示例性的,逆变器可以是单相逆变器,如图1a中示出的逆变器101a,逆变器101a包括四个igbt及其反并联二极管、电阻和电感等,控制器103可以控制各个igbt的通断状态,使得逆变器101a可以将直流电源100提供的直流电转换为单相交流电。此时交流负载102可以是单相交流负载(即单相交流电网),例如变压器、扬声器等。
74.在一些可行的实施方式中,逆变器可以是三相逆变器。参见图1b,图1b为本技术实施例提供的一种三相逆变器的电流控制系统的结构框图。如图1b所示,电流控制系统还适用于三相逆变器,图1b示出的电流控制系统与图1a中示出的电流控制系统的区别在于,将图1a中逆变器101a的电路拓扑替换为图1b示出的逆变器101b。该逆变器101b为三相逆变器,igbt及其反并联二极管两两串联形成逆变器101b的一相电路,逆变器101b中的三相电路分别并联。控制器103控制逆变器101b中各个igbt的通断状态,使得逆变器101b可以将直流电源100提供的直流电转换为三相交流电。此时,交流负载102可以是三相交流负载(即三相交流电网),例如三相电机等。
75.可以理解的是,图1a和图1b中示出的逆变器101a和逆变器101b只是对逆变器的拓扑结构进行示例性说明,而非穷举,应当理解为本技术的逆变器还可以实施为其他拓扑电
路,比如现有技术中的全桥逆变电路、半桥逆变电路等。本技术不对逆变器的具体电路结构进行限制。换句话说,本技术中涉及的逆变器包括但不限于图1a中示出的逆变器101a和图1b中示出的逆变器101b。
76.控制器103可以是中央处理单元(central processing unit,cpu)、其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现成可编程门阵列(field-programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。示例性的,控制器103的输入端可以耦合传感器例如电压传感器、电流传感器等,以获取逆变器当前的输出电流和输出电压。
77.参见图2,图2为本技术实施例提供的逆变器的电流控制器的一结构框图。如图2所示,控制器中包括电压获取单元201、虚拟阻抗单元202和驱动单元203。可以理解的是,本技术中为了更好地体现控制器在对逆变器的输出电流进行控制的各个数据流,将控制器按照功能划分为多个单元,在实际产品应用中,本技术中的控制器主要体现为至少一个芯片或者是可以建立通信连接的多个芯片。
78.控制器(例如图2中示出的电压获取单元201)可以根据逆变器的参考电压参量获取逆变器的第一驱动电压。该参考电压参量包括参考电压幅值和参考电压频率。
79.该参考电压参量是控制器根据逆变器的参考功率、逆变器的实际输出功率以及功率与电压参量之间的映射关系确定的。示例性的,逆变器的参考功率包括参考有功功率p
ref
和参考无功功率q
ref
,逆变器的实际输出功率包括实际有功功率p和实际无功功率q,则功率与电压参量之间的映射关系可以包括有功功率与电压频率之间的映射关系和无功功率与电压幅值之间的映射关系。
80.控制器根据参考有功功率p
ref
、实际有功功率p以及有功功率与电压频率之间的映射关系,确定逆变器的参考电压频率w
ref
。控制器还可以根据参考无功功率q
ref
、实际无功功率q以及无功功率与电压幅值之间的映射关系,确定逆变器的参考电压幅值v
ref
。
81.可选的,参考有功功率p
ref
和参考无功功率q
ref
可以是预先设置的固定值。
82.实际有功功率p和实际无功功率q可以是控制器计算得到的。例如,控制器的输入端耦合有电压传感器和电流传感器,以该逆变器是三相逆变器为例,包括u、v、w相。控制器从电压传感器中获取逆变器各相输出的交流电压vu、vv和vw,从电流传感器中获取各相输出的交流电流iu、iv和iw,并根据逆变器各相输出的交流电压与各相输出的交流电流得到各相电压和电流之间的相位差θu、θv和θw。如何得到各相电压和电流之间的相位差可以参考现有技术中的过零检测方法,此处不再赘述。此时,实际有功功率p和实际无功功率q可以表示为:
[0083][0084]
在一些可行的实施方式中,有功功率与电压频率之间的映射关系可以参见图3a,图3a为申请实施例提供的有功功率与电压频率之间的下垂特性曲线。如图3a所示,有功功率与电压频率之间的映射关系可以表示为:
[0085]wref
=k
p
(p-p
ref
)+woꢀꢀꢀꢀ
公式2
[0086]
其中wo为逆变器的额定电压频率。k
p
是有功功率下垂系数,可以理解为图3a中示出
曲线的斜率。wo与k
p
均是逆变器的器件属性,与逆变器的型号和/或生产厂商有关。
[0087]
无功功率与电压幅值之间的映射关系可以参见图3b,图3b为本技术实施例提供的无功功率与电压幅值之间的下垂控制特性曲线。如图3b所示,无功功率与电压幅值之间的映射关系可以表示为:
[0088]vref
=kq(q-q
ref
)+voꢀꢀꢀꢀ
公式3
[0089]
其中vo为逆变器的额定电压幅值。kq是无功功率下垂系数,可以理解为图3b中示出的曲线斜率。vo与kq也均是逆变器的器件属性,与逆变器的型号和/或生产厂商有关。
[0090]
可选的,在一些可行的实施方式中,控制器中可以存储有参考有功功率p
ref
、实际有功功率p以及有功功率与电压频率之间的映射关系,通过查询表格得到逆变器的参考电压频率w
ref
。同理的,控制器中还可以存储有参考无功功率q
ref
、实际无功功率q以及无功功率与电压幅值之间的映射关系,通过查询表格得到逆变器的参考电压幅值v
ref
。
[0091]
控制器通过对参考电压频率w
ref
进行积分运算,得到参考相位θ。以逆变器是三相逆变器为例,包括u、v、w相。u、v、w相的相电压的电压幅值相同,相位相差120
°
,则该逆变器的第一驱动电压可以表示为:
[0092][0093]
若该逆变器是单相逆变器,则单相逆变器的第一驱动电压可以直接表示为u相电压mu。
[0094]
控制器根据第一驱动电压以及逆变器的阻尼电压,确定逆变器的第二驱动电压。
[0095]
该逆变器的阻尼电压是控制器(例如图2中示出的虚拟阻抗单元202)根据逆变器的虚拟阻抗值以及逆变器当前的输出电流确定的。
[0096]
在一些可行的实施方式中,控制器中设置有第一预设电流阈值ith,该第一预设电流阈值可以理解为逆变器正常工作的安全电流,具体大小与逆变器的型号和/或生产厂商有关。控制器获取逆变器当前的输出电流i,当逆变器当前的输出电流i不小于第一预设电流阈值ith时,控制器将虚拟阻抗值设为恒定非零值r,此时虚拟阻抗单元202有效;当逆变器当前的输出电流小于第一预设电流阈值时,控制器将虚拟阻抗单元设为零,此时虚拟阻抗单元202无效。即可以表示为公式如下:
[0097][0098]
其中ra为虚拟阻抗。
[0099]
可选的,在一些可行的实施方式中,控制器可以根据逆变器当前的输出电流与第一预设电流阈值之间的差值以及第一预设阻抗值,确定虚拟阻抗值。此时虚拟阻抗值的调节能力是可以跟随逆变器当前的输出电流的大小变换的,逆变器当前的输出电流的大小与虚拟阻抗值的大小是正比例关系。换句话说,逆变器当前的输出电流i超出第一预设电流阈值i
th
较多时,控制器将虚拟阻抗值设置得较大;逆变器当前的输出电流i超出第一预设电流阈值i
th
较少时,控制器将虚拟阻抗值设置的较小,具体可以表示为公式如下:
[0100][0101]
其中r0为预先设置的基准阻抗值,可以根据实践经验配置得到,例如可以是220ω。
[0102]
实施本技术实施例,虚拟阻抗值是跟随逆变器的输出电流的大小变化的,使得逆变器的第二驱动电压更加准确,适应性强。
[0103]
由上述公式5和公式6确定了虚拟阻抗值ra,参见图4,图4为本技术实施例提供的虚拟阻抗的一计算示意图。如图4所示,此时即使逆变器为三相逆变器,该三相逆变器对应的虚拟阻抗值都是相同的,简单方便,计算量少。
[0104]
可选的,在一些可行的实施方式中,逆变器为三相逆变器,包括u、v、w相。控制器中对应u、v、w相分别设置有各个第二预设电流阈值i
uth
、i
vth
和i
wth
。i
uth
、i
vth
和i
wth
可以相同也可以不相同。控制器分别将逆变器各相当前的输出电流与对应的各个第二预设电流阈值进行比较,当逆变器任一相当前的输出电流不小于该任一相对应的第二预设电流阈值时,控制器将该任一相对应的虚拟阻抗值设置为恒定非零值,例如r1、r2或r3等。可以用公式表示如下:
[0105][0106]rua
、r
va
和r
wa
分别为逆变器u、v、w相的虚拟阻抗值。
[0107]
可选的,在一些可行的实施方式中,控制器可以根据逆变器中各相当前的输出电流与逆变器每相对应的各个第二预设电流阈值之间的差值以及各个第二预设阻抗值,例如r4、r5或r6,确定逆变器中各相的虚拟阻抗值。可以用公式表示如下:
[0108][0109]
参见图5,图5为本技术实施例提供的虚拟阻抗的又一计算示意图。如图5所示,控制器分别对逆变器各相对应的各个虚拟阻抗值进行计算,相较公式5和公式6中逆变器各相对应一个虚拟阻抗值,实施本技术实施例,可以独立对逆变器各相的输出电流进行判断,并且分别对逆变器各相的虚拟阻抗值进行计算,得到的结果更加准确,并且适用于逆变器各相发生不对成故障的场景,适用性更强。
[0110]
由上述公式5、公式6、公式7或公式8可以确定逆变器的虚拟阻抗值,然后控制器根据欧姆定律,将虚拟阻抗值乘以逆变器当前的输出电流,得到逆变器的阻尼电压。可以理解的是,若该逆变器为三相逆变器,该阻尼电压分为包括三个阻尼电压,控制器根据逆变器中各相的虚拟阻抗值以及逆变器中各相当前的输出电流确定各相对应的阻尼电压。
[0111]
进一步的,控制器将第一驱动电压与逆变器的阻尼电压进行相减,得到逆变器的第二驱动电压。示例性的,以逆变器为三相逆变器为例,包括u、v、w相。控制器根据逆变器中各相的第一驱动电压例如mu、mv和mw,以及各相对应的阻尼电压,确定所述逆变器中各相对应的第二驱动电压例如vu,、vv和vw。
[0112]
控制器(例如图2中示出的驱动单元203)根据该第二驱动电压生成驱动信号,并向逆变器发送该驱动信号,该驱动信号用于控制逆变器的输出电流。可以理解的是,以逆变器是三相逆变器为例,控制器根据逆变器中各相对应的第二驱动电压生成各个驱动信号,并向逆变器中的各相分别发送对应的各个驱动信号,每个驱动信号分别对应逆变器中的每一相,各个驱动信号分别对应控制逆变器中每相的输出电流。
[0113]
控制器根据第二驱动电压生成驱动信号的具体方式可以参考现有技术,示例性的,该驱动信号可以是脉冲宽度调制(pulse width modulation,pwm)波,控制器将第二驱动电压与预设高频载波进行比较,若第二驱动电压低于该预设高频载波,则形成为pwm波的高电平;若第二驱动电压高于该预设高频载波,则形成pwm波的低电平。控制器将生成的pwm波发送至逆变器,逆变器基于该pwm波来切换开通和关断状态,逆变器如何基于pwm波来进行状态切换可以参考现有技术中逆变器的控制方式,例如pwm调制、空间矢量脉宽调制(space vector pulse width modulation,svpwm)、不连续脉冲宽度调制(discontinuous pulse width modulation,dpwm)等,本技术实施例不作赘述。
[0114]
可以理解的是,驱动单元203可以与上述电压获取单元201和虚拟阻抗单元202为同一个芯片,也可以是独立的pwm生成芯片。
[0115]
逆变器的导通时间越长,逆变器的输出电流越大,换句话说,逆变器的输出电流与驱动信号有关,而该驱动信号由第二驱动电压确定。在本技术实施例中,控制器通过逆变器当前的输出电流与虚拟阻抗值确定阻尼电压,将该阻尼电压与第一驱动电压进行相减,得到第二驱动电压,并基于该第二驱动电压生成驱动信号。实施本技术实施例,阻尼电压可以直接改变逆变器的驱动电压,从而生成新的驱动信号,控制逆变器的输出电流。
[0116]
进一步的,本技术实施例中的参考功率可以是控制器根据所述逆变器的输出电压、所述逆变器的额定电压以及所述逆变器的预设功率确定的,该预设功率包括预设无功功率和额定视在功率。具体实现中,参见图6,图6为本技术实施例提供的逆变器的电流控制器的又一结构框图。如图6所示,控制器(例如图6中示出的参考功率确定单元601)在逆变器的输出电压低于预设电压阈值的情况下,根据逆变器的输出电压、该逆变器的额定电压以及预设无功功率,确定逆变器的参考无功功率。例如,控制器可以按照逆变器的输出电压与逆变器的额定电压之间的比例来对预设无功功率进行减小;又例如,控制器可以按照逆变器的输出电压与逆变器的额定电压之间的差值来对预设功率进行减小等,本技术实施例不对如何进行参考无功功率的计算进行限制。在逆变器的输出电压不低于预设电压阈值的情况下,逆变器的参考无功功率即为预设无功功率。
[0117]
以控制器按照逆变器的输出电压与逆变器的额定电压之间的比例来对预设无功功率进行减小为例,逆变器的参考无功功率q
ref
可以表示为:
[0118][0119]
其中q0为预设无功功率,vg为逆变器的输出电压,vo为逆变器的额定电压。q0和vo为
逆变器的器件属性,与逆变器的型号和/或生产厂商有关。vg可以是控制器从传感器中获取得到的。v1为预设电压阈值,可以根据不同的应用情况进行设置,例如v1=0.9vo。
[0120]
控制器在逆变器的输出电压低于预设电压阈值的情况下,根据逆变器的参考无功功率q
ref
、逆变器的输出电压vg、逆变器的额定电压vo以及额定视在功率s,确定逆变器的参考有功功率p
ref
。有功功率的平方与无功功率的平方之和等于视在功率的平方。在一些可行的实施方式中,控制器可以将逆变器的额定视在功率的平方减去上述参考无功功率的平方,从而得到参考有功功率的平方。可选的,控制器可以按照逆变器的输出电压与逆变器的额定电压之间的比例来将逆变器的额定视在功率减小之后,再计算得到逆变器的参考有功功率,公式可以表示为:
[0121][0122]
其中p0为预设无功功率,是逆变器的器件属性,与逆变器的型号和/或生产厂商有关。
[0123]
控制器(例如图4中示出的实际功率计算单元602)获取逆变器当前的输出电流和输出电压,计算逆变器的实际输出功率,具体计算可以参考前文结合图2所描述的公式1,此处不作赘述。
[0124]
控制器(例如图4中示出的参考电压参量确定单元603)基于参考功率确定单元601确定得到的参考功率以及实际功率计算单元602计算得到的实际输出功率,确定逆变器的参考电压参量。该逆变器的参考电压参量可以参考前文结合图3a至图3b所描述的实施例,可以理解的是,控制器在确定电压参考参量之后,可以参考前文结合图2所描述的实施例,直接改变逆变器的驱动电压,生成新的驱动信号,控制逆变器的输出电流,此处不对此进行赘述。
[0125]
本技术实施例,在前文结合图2至图5所描述实施例的基础上,增加参考功率的确定,使得控制器在逆变器的输出电压低于预设电压阈值时,除了可以增加阻尼电压改变逆变器的驱动电压之外,还可以进一步地控制逆变器的参考功率,从而控制逆变器的输出电流。
[0126]
在一些可行的实施方式中,本技术实施例还可以通过控制器(例如图4中示出的电压/电流环路单元604)确定第一驱动电压,此时,电压/电流环路单元604获取逆变器的输出电压和参考电压参量确定单元603确定得到的参考电压参量,并基于逆变器的输出电压和参考电压参量,确定该逆变器的参考电流。电压/电流环路单元604还获取逆变器当前的输出电流,并根据逆变器当前的输出电流与逆变器的参考电流,确定逆变器的第一驱动电压。该第一驱动电压与逆变器的阻尼电压相减得到第二驱动电压。本技术实施例中,阻尼电压直接与电压/电流环路单元输出的第一驱动电压进行运算,不用受限于电压/电流环路单元的带宽限制,并且也不会受电压/电流环路单元的延时影响,实施本技术实施例,逆变器的电流控制系统响应有效且快速。
[0127]
为了说明本技术实施例提供的逆变器的电流控制系统可以控制逆变器的输出电流,特别是在逆变器的输出电压低于预设电压阈值时可以控制逆变器的输出电流,本技术的发明人对不实施本技术实施例、采用本技术实施例中恒定非零虚拟阻抗值以及采用本申
请实施例中可变虚拟阻抗值做了对比实验。参见图7,图7为实施本技术实施例的效果示意图。如图7所示,曲线1对应的是不实施本技术实施例时逆变器的输出电流,曲线2对应的是采用本技术实施例中恒定非零的虚拟阻抗值(即对应前文公式5中的虚拟阻抗)时逆变器的输出电流,曲线3对应的是采用本技术实施例中可变虚拟阻抗(即对应前文公式6中的虚拟阻抗)时逆变器的输出电流。t1时刻为逆变器的输出电压跌落至预设电压阈值之下的时刻,t2时刻为逆变器的输出电流下降至第一预设电流阈值之下的时刻。从图7可以看出,在逆变器的输出电压跌落至预设电压阈值之下时,曲线1的电流急剧增大,即可以理解为逆变器的电流控制系统的电流会迅速变大,造成对逆变器中的半导体器件的损坏。而曲线2和曲线3的电流变化平缓,较好地保护了逆变器的设备安全。在逆变器的输出电流下降至第一预设电流阈值之下时(即t2时刻),此时虚拟阻抗值可以为零,由于曲线2是恒定非零的虚拟阻抗值,在t2时刻需要重置虚拟阻抗值为零,此时逆变器的输出电流大幅上升,存在损耗逆变器的风险;而曲线3此时的电流变化依然平缓,能够很好地保护逆变器,适应性强。
[0128]
本技术实施例还提供了一种逆变器的电流控制器,该电流控制器包括收发器、处理器和存储器。
[0129]
收发器包括但不限于接收逆变器当前的输出电流以及输出电压,并用于向该逆变器发送驱动信号。存储器中存储有指令,可以为双倍速率同步动态随机存储器(double data rate synchronous dynamic random accessmemory,ddr sdram)或者其它类型的缓存。处理器可以包括但不限于应用处理器、一个或多个微处理器、数字信号处理器(digital signal processing,dsp)、微控制器(microcontroller unit,mcu)或人工智能处理器等。该处理器通过调用存储器中存储的指令,执行前文结合图2至图6所描述的任一实施例。
[0130]
需要说明的是,上述术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0131]
在本技术对单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,如:多个单元或组件可以结合,或可以集成到另一个系统,或一些特征可以忽略,或不执行。
[0132]
上述作为分离部件说明的单元可以是、或也可以不是物理上分开的,作为单元显示的部件可以是、或也可以不是物理单元,即可以位于一个地方,也可以分布到多个网络单元上;可以根据实际的需要选择其中的部分或全部单元来实现本实施例方案的目的。
[0133]
另外,在本发明各实施例中的各功能单元可以全部集成在一个处理单元中,也可以是各单元分别单独作为一个单元,也可以两个或两个以上单元集成在一个单元中;上述集成的单元既可以采用硬件的形式实现,也可以采用硬件加软件功能单元的形式实现。
[0134]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1