一种适用于任意桥臂数的三电平变换器直流侧中性点电位平衡方法与流程
1.本发明涉及三电平电力电子变换器领域,具体涉及一种适用于任意桥臂数的三电平变换器直流侧中性点电位平衡方法。
背景技术:
2.自1981年首次提出以来,中性点二极管钳位式三电平拓扑已广泛用于电机驱动器、并网逆变器、有源电力滤波器等领域。与传统的两电平拓扑相比,三电平拓扑具有明显的优势,例如较低的开关电压应力和较小的无源滤波器体积。但是,三电平拓扑也有其缺点,最突出的一点是:为了保持其直流侧中性点电位平衡需要增加额外的控制方法。如果没有适当的平衡控制,直流侧两个电容器电压之间的差值在某些极端情况下会变得很大,从而导致输出电流波形畸变甚至开关器件过电压损坏。
3.当前,三电平直流侧中性点电位平衡方法已得到广泛研究。一般而言,中性点电位平衡方法可分为硬件方法和软件方法。硬件方法需要在三电平拓扑的直流侧增加额外的硬件设备,主动地控制中性点电流的流入和流出,硬件方法虽然可以取得很好的中性点电位平衡效果,但会造成成本增加。所以一般的实际应用中更倾向于增加软件控制方法来平衡三电平直流侧中性点电位。
4.根据不同的脉宽调制方法,三电平直流侧中性点电位软件平衡方法可以分为两类:一类是基于空间矢量脉冲宽度调制(svpwm)的平衡方法,另一类是基于载波脉冲宽度调制(cbpwm)的平衡方法。事实上两种基于不同脉宽调制方法的平衡方法本质上是等效的,此处仅关注与本发明相关的基于载波脉冲宽度调制(cbpwm)的平衡方法。
5.各种基于cbpwm调制方法的三电平直流侧中性点电位平衡方法已经被广泛地研究。基于cbpwm调制方法的平衡方法本质上在于计算出合适的共模电压,通过将计算出的共模电压叠加到原有的调制信号上,实现三电平直流侧中性点电位的平衡控制。根据直流侧中性点电位和中性点平均电流之间的关系。
6.文献[1]q.song,w.liu,q.yu,et al.a neutral
‑
point potential balancing algorithm for three
‑
level npc inverters using analytically injected zero
‑
sequence voltage[c].ieee applicaton power electronics conference,2003.提出了一种基于“计算
‑
验证
‑
修正”思想的平衡方法,它本质上是一种间接的共模电压计算方法,这也导致其在某些情况下计算出的共模电压值不准确。文献[2]c.wang,y.li.analysis and calculation of zero
‑
sequence voltage considering neutral
‑
point potential balancing in three
‑
level npc converters[j].ieee transactions on industry electronics,2010,57(7):2262
–
2271.提出了一种共模电压的精确计算方法,但是其不足之处在于实现的过程较为复杂。文献[3]h.akagi,t.hatada.voltage balancing control for a three
‑
level diode
‑
clamped converter in a medium
‑
voltage transformerless hybrid active filter[j].ieee transactions on power electronics,2009,24(3):
571
–
579.通过将六次谐波注入到调制信号中也可以平衡直流侧中性点电位,但是在输出高功率因数电流的情况下,它的平衡效果不太理想。为了减少开关损耗,文献[4]j.pou,j.zaragoza,s.ceballos,et al.a carrier
‑
based pwm strategy with zero
‑
sequence voltage injection for a three
‑
level neutral
‑
point
‑
clamped converter[j].ieee transactions on power electronics,2012,27(2):642
–
651.提出了一种类比于svpwm最近三矢量调制方法的直流侧中性点电位平衡策略,但是其计算得出的共模电压的准确性不足。在文献[5]j.lyu,w.hu,f.wu,et al.variable modulation offset spwm control to balance the neutral
‑
point voltage for three
‑
level inverters[j].ieee transactions on power electronics,2015,30(12):7181
–
7192.中,通过控制调制波的偏移量可以维持三电平直流侧中性点电位的平衡,但是该方法需要得到实时的输出电流功率因数,而实时功率因数信息在实际运行过程中不容易直接得到。
[0007]
以上三电平直流侧中性点电位平衡方法,存在共模电压计算过程复杂或共模电压计算结果不准确的问题。另外,以上三电平直流侧中性点电位平衡方法均是在三桥臂三电平拓扑的情况下讨论的,对于更多桥臂数三电平变换器并不适用。
技术实现要素:
[0008]
为解决上述技术问题,本发明提供一种适用于任意桥臂数的三电平变换器直流侧中性点电位平衡方法,该方法是一种用于三电平拓扑的直流侧中性点电位平衡方法。该平衡方法的特点在于具有任意桥臂数三电平拓扑的普适性,适用于任意桥臂数三电平变换器直流侧中性点电位平衡控制;并且用于平衡控制的共模电压计算过程简单,计算结果准确。
[0009]
本发明采取的技术方案为:
[0010]
一种适用于任意桥臂数的三电平变换器直流侧中性点电位平衡方法,基于采集的三电平变换器直流侧电容电压、交流侧输出电流以及每个桥臂的调制电压信号,通过代数运算和区间条件判定,即可计算出用于任意桥臂数三电平拓扑直流侧中性点电位平衡的共模电压;将计算得到的共模电压叠加到每个桥臂的调制信号上,即可实现三电平拓扑直流侧中性点电位的平衡。
[0011]
一种适用于任意桥臂数的三电平变换器直流侧中性点电位平衡方法,包括以下步骤:
[0012]
步骤1:采集多桥臂三电平变流器的直流侧上、下电容电压v
dc1
、v
dc2
,多桥臂三电平变流器的交流侧输出电流i
a,b,c,...,n
,以及未加入共模分量的各桥臂归一化调制波信号v
a
、v
b
、v
c
、
…
、v
n
;定义多桥臂三电平变流器的两个直流侧电容值均为c,定义平衡方法控制周期为t
s
;
[0013]
步骤2:将每一个控制周期t
s
内的各桥臂归一化调制波信号v
a
、v
b
、v
c
、
…
、v
n
按照从大到小依次定义为v1、v2、v3、
…
、v
n
,并且定义i1、i2、i3、
…
、i
n
为v1、v2、v3、
…
、v
n
对应的交流侧输出电流;
[0014]
步骤3:设j为1到n中的某一个值,定义v
comj
的计算方法如公式(1)所示:
[0015]
[0016]
步骤4:令j=1,计算v
com1
的值,并判定v
com1
否满足同时位于[
‑
v1,
‑
v2]和[
‑1‑
v
n
,1
‑
v1]区间的条件,如果满足条件则取v
com1
为最终的共模电压计算结果,共模电压计算过程结束;如果不满足条件则计算v
com2
,并判定v
com2
是否满足同时位于[
‑
v2,
‑
v3]和[
‑1‑
v
n
,1
‑
v1]区间的条件,如果满足条件则取v
com2
为最终的共模电压计算结果,共模电压计算过程结束;如果不满足条件则继续计算v
com3
,并判定v
com3
是否满足同时位于[
‑
v3,
‑
v4]和[
‑1‑
v
n
,1
‑
v1]区间的条件,依次类推;
[0017]
步骤5:如果v
comn
的值也不满足同时位于[
‑
v
n
,+∞]和[
‑1‑
v
n
,1
‑
v1]区间的条件,那么最终共模电压的取值从
‑1‑
v
n
和1
‑
v1中选取,选择的标准取决于的公式(2)中f的计算结果,如果计算结果f大于0,则取1
‑
v1为最终的共模电压;否则,取
‑1‑
v
n
为最终的共模电压;
[0018][0019]
步骤6:最后,将计算得到的最终共模电压加入到各桥臂归一化调制波v
a
、v
b
、v
c
、
…
、v
n
中,即可实现多桥臂三电平变流器直流侧中性点电位的平衡控制。
[0020]
由于采用了上述技术方案,本发明具有如下的优点:
[0021]
本发明提出了一种适用于任意桥臂数三电平变换器直流侧中性点电位平衡方法,该方法是一种用于三电平拓扑的直流侧中性点电位平衡方法,该平衡方法的特点在于具有任意桥臂数三电平拓扑的普适性,并且本发明通过简单的代数运算和区间条件判定,即可计算出用于任意桥臂数三电平拓扑直流侧中性点电位平衡的共模电压,用于平衡控制的共模电压计算过程简单,计算结果准确。
附图说明
[0022]
图1为多桥臂三电平变流器拓扑图。
[0023]
图2为多桥臂三电平变换器直流侧中性点电位平衡控制算法模块输入输出信号示意图。
[0024]
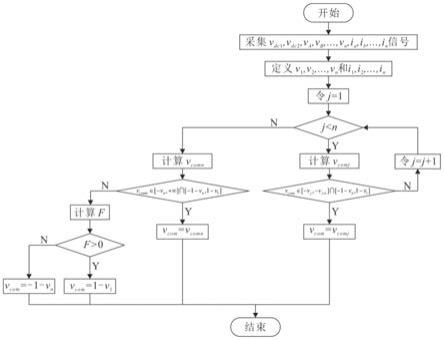
图3为多桥臂三电平变换器直流侧中性点电位平衡控制方法流程图。
[0025]
图4为四桥臂三电平变换器无直流侧中性点电位平衡控制仿真波形图。
[0026]
图5为四桥臂三电平变换器应用本发明直流侧中性点电位平衡控制方法仿真波形图。
具体实施方式
[0027]
一种适用于任意桥臂数的三电平变换器直流侧中性点电位平衡方法,基于采集的三电平变换器直流侧电容电压、交流侧输出电流以及每个桥臂的调制电压信号,通过简单的代数运算和区间条件判定,即可计算出用于任意桥臂数三电平拓扑直流侧中性点电位平衡的共模电压;将计算得到的共模电压叠加到每个桥臂的调制信号上,即可实现三电平拓扑直流侧中性点电位的平衡。
[0028]
下面以四桥臂三电平变换器为例,说明本发明的具体实施步骤。
[0029]
一种适用于任意桥臂数的三电平变换器直流侧中性点电位平衡方法,包括以下步骤:
[0030]
s1:通过传感器采集多桥臂三电平变流器的直流侧上、下电容电压v
dc1
、v
dc2
,多桥臂变流器的交流侧输出电流i
a,b,c,d
,以及未加入共模分量的各桥臂归一化调制波v
a
、v
b
、v
c
、v
d
。定义多桥臂三电平变换器的两个直流侧电容值均为c。另外,本发明提出的平衡方法采用数字控制方式实现,数字控制频率和变换器开关频率相同,定义平衡方法控制周期为t
s
。
[0031]
上述传感器可以是霍尔传感器或其他形式的传感器。当采电压信号时可以采用lem公司的lv25
‑
p或其他量程电压传感器;当采电流信号时可采用lem公司的la55
‑
p或其他量程电流传感器。
[0032]
上述数字控制方式具体是指采用数字信号处理器(dsp)来实现本发明提出的平衡算法,dsp的具体型号可以是ti公司的ti28335处理器或者其他型号的数字信号处理器。
[0033]
s2:将每一个控制周期内的各桥臂归一化调制波信号v
a
、v
b
、v
c
、v
d
按照从大到小依次定义为v1、v2、v3、v4,并且定义i1、i2、i3、i4为v1、v2、v3、v4对应的交流侧输出电流。
[0034]
s3:假设j为1到4中的某一个值,那么定义v
comj
的计算方法如公式(1)所示:
[0035][0036]
s4:令j=1,计算v
com1
的值,并判定v
com1
否满足同时位于[
‑
v1,
‑
v2]和[
‑1‑
v4,1
‑
v1]区间的条件,如果满足条件则取v
com1
为最终的共模电压计算结果,共模电压计算过程结束;如果不满足条件则计算v
com2
,并判定v
com2
是否满足同时位于[
‑
v2,
‑
v3]和[
‑1‑
v4,1
‑
v1]区间的条件,如果满足条件则取v
com2
为最终的共模电压计算结果,共模电压计算过程结束;如果不满足条件则继续计算v
com3
,并判定v
com3
是否满足同时位于[
‑
v3,
‑
v4]和[
‑1‑
v4,1
‑
v1]区间的条件,如果满足条件则取v
com4
为最终的共模电压计算结果,共模电压计算过程结束;
[0037]
s5:如果v
com4
的值也不满足同时位于[
‑
v4,+∞]和[
‑1‑
v4,1
‑
v1]区间的条件,那么最终共模电压的取值从
‑1‑
v4和1
‑
v1中选取。选择的标准取决于的公式(2)中f的计算结果,如果计算结果f大于0,则取1
‑
v1为最终的共模电压,否则取
‑1‑
v4为最终的共模电压。
[0038][0039]
s6:将计算得到的最终共模电压加入到各桥臂归一化调制波v
a
、v
b
、v
c
、v
d
中,即可实现多桥臂三电平直流侧中性点电位的平衡控制,如图2所示,从图2中可以看出平衡控制算法的输入为归一化调制信号v
a,b,c,...,n
、交流侧电流i
a,b,c,...,n
、直流侧电容电压v
dc1
和v
dc2
,输出为共模电压计算结果,将该计算结果叠加到原先的归一化调制信号,即可实现直流侧电容电压平衡。
[0040]
为了验证本发明所提出的一种适用于任意桥臂数的三电平变换器直流侧中性点电位平衡方法,下面以四桥臂三电平变换器为例,搭建了仿真模型,所搭建的仿真模型参数如下:四桥臂三电平变换器直流侧总电压为150v,直流侧两个电容的容值均为700uf,变换器归一化调制信号为调制比为1的四相电压,四相电压之间相位差为90度;变换器交流侧四相滤波电感的感值均为850uh,交流侧负载电阻为2ω。
[0041]
仿真结果如图4和图5所示。其中,图4表示四桥臂三电平变换器无直流侧中性点电位平衡控制仿真波形图,图5表示四桥臂三电平变换器应用本发明直流侧中性点电位平衡
控制方法仿真波形图。在图4和图5中在0s时均人为将直流侧电容电压初始值分别设置为85v和65v。在图4和图5中0.1s表示变换器开始工作并输出交流电流。
[0042]
在图4中由于没有采用直流侧电容电压平衡算法,从0.1s变换器开始输出交流电流时,直流侧电容电压v
dc1
和v
dc2
之间的差值有减小的趋势,但是最终直流侧电容电压v
dc1
和v
dc2
之间还是有差值。而在图5中由于采用了本发明提出的平衡算法,在0.1s变换器开始输出交流电流时,直流侧电容电压v
dc1
和v
dc2
的值迅速趋于一致,使得直流侧电容电压得到了有效平衡。此对比仿真结果也说明了本发明的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1