一种旋转压电马达的制作方法
1.本发明属于精密驱动与定位技术领域,具体涉及一种旋转压电马达。
背景技术:
2.压电马达,也称为超声波马达,通过逆压电效应利用振动器的机械振动。电机的运动和扭矩是通过振动器和滑块(转子)之间的摩擦获得的。迄今为止,它们已广泛应用于机器人,高精度仪器中,研究人员喜欢压电电机的原因是它们与电磁电机相比具有优越的优点,包括结构紧凑简单、无线圈、响应迅速、重量和功耗最小、断电状态下自锁以及没有电磁干扰等。
3.压电马达可分为超声马达和准静态马达。超声马达靠定子与动子之间的摩擦力驱动使动子运动,工作在谐振状态,频率高,速度快。因为由单一谐波驱动,定子驱动动子的过程是渐进的,定子与动子之间存在滑动摩擦力,磨损严重,寿命短。2016年,杨等人创造了一种空载速度为342转/分、频率为57.47千赫的纵向弯曲复合驱动电机。尽管如此,最大扭矩仅为6.26 n mm,高频带来高速,但由于摩擦联轴器的驱动原理,限制了电机的效率和使用寿命。准静态马达的频率相对较低,如尺蠖马达。尺蠖马达通过夹紧单元和驱动振子的配合实现单向运动。理论上讲,尺蠖马达在运行过程中不存在滑动摩擦,不存在摩擦磨损,效率很高,寿命比较长。同时,这种类型的压电马达需要两个箱位单元和一个驱动单元同步交替动作,从控制的角度讲难度比较大,需要比较复杂的电路实现有效的控制。
技术实现要素:
4.为解决超声马达摩擦磨损严重和准静态马达频率低速度低得缺点,本发明提供了一种旋转压电马达。
5.一种旋转压电马达包括底座4、定子机构3和动子机构。
6.所述底座4为l型底座;底座4的水平底板上开有倒t型槽41,底座4的直立板为正方形框架;所述定子机构3包括十字形框架31、两对旋转压电片34和两对箝拉压电片35;所述十字形框架的中部开设有盲孔,盲孔为圆台孔32;两对旋转压电片34分别固定设于十字形框架的一对垂直臂38的两侧面上,形成驱动单元;两对箝拉压电片35分别固定设于十字形框架的一对水平臂33的两侧面上,形成箝位单元;所述十字形框架31通过一对水平臂33的悬臂端与底座4的正方形框架的内壁固定连接固定在底座4的正方形框架内,所述一对垂直臂38的悬臂端与底座4的正方形框架的内壁不接触;所述动子机构包括输出轴1和支撑滑块2;输出轴1通过轴承贯穿设于支撑滑块2的上部,输出轴1的一端为圆台顶尖11,且输出轴1的圆台顶尖11位于十字形框架的圆台孔32内;支撑滑块2的下部与倒t型槽41配合设于底座4上;所述底座4的直立板和动子机构的支撑滑块2之间设有预紧机构;工作时,向两对旋转压电片34输入正弦信号,一对垂直臂38的弹性振子在一个周
期内带动定子机构3实现正转或反转交替的转动;向两对箝位压电片35输入方波信号,一对水平臂33的弹性振子在一个周期内实现定子机构3在垂直于旋转面的方向上前后移动,实现定子机构3上的圆台孔32的孔口与输出轴1的圆台顶尖11接触,实现箝位过程;同时向两对旋转压电片34、两对箝位压电片35分别输入频率相等的正弦信号或方波信号,使旋转驱动动作和箝位动作同步进行,以实现马达的连续转动。
7.进一步限定的技术方案如下:所述十字形框架31的一对水平臂的悬臂端分别通过固定块37和螺栓固定连接着底座4的正方形框架的两侧边框内壁;所述水平臂的悬臂端和固定块37之间设有柔性铰链36。
8.所述预紧机构包括螺杆7、螺母6和弹簧5,弹簧5套设在螺杆7上;所述螺杆7穿过底座4下部的通孔43和支撑滑块2下部的通孔21,弹簧5套设在螺母6内侧的螺杆7的外伸端上;通过调节螺母6实现预紧力的调节,实现调节工作时输出轴1的圆台顶尖11与定子3的圆台槽口32内壁的接触或非接触。
9.所述底座4的倒t型槽41两侧的水平底板上分别开设有一对椭圆孔42,与一对椭圆孔42对应的支撑滑块2下部两侧分别开设有定位螺纹孔22;支撑滑块2通过螺栓和定位螺纹孔22的螺纹连接配合固定在底座4上,一对椭圆孔42实现支撑滑块2在底座4上调节位置。
10.所述旋转压电片34的材料和箝位压电片35的材料均为pzt
‑
4型压电陶瓷片。
11.所述底座4、固定块37和支撑滑块2的材料均为铸铁。
12.所述柔性铰链36的材料为弹簧钢。
13.所述十字形框架31和输出轴1的材料均为碳素结构钢。
14.本发明的有益技术效果体现在以下方面:1.本发明利用正弦信号控制定子的驱动和箝位动作,实现了定子与输出轴的接触都是突变的,定子与动子之间靠静摩擦力驱动,不存在滑动摩擦力,定子与动子之间没有磨损,延长马达寿命。
15.2.本发明的工作状态为谐振状态,当两个电信号协同工作时,输出轴将实现单向旋转,并且输出轴的旋转方向也可以通过改变正弦信号的初始相位来实现反转。当旋转压电马达的工作频率是652hz、驱动电压为180v时,旋转压电马达的空载转速和最大输出转矩为15.6r/min和83.6n
·
mm。
附图说明
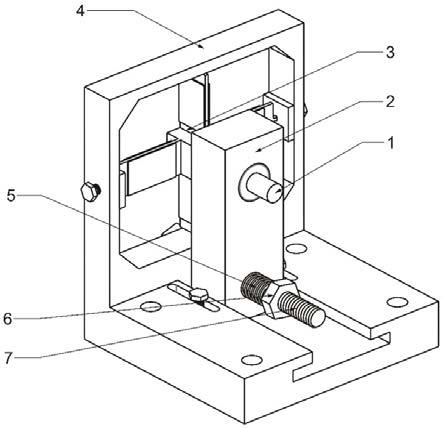
16.图1为本发明结构示意图。
17.图2为图1的后视图。
18.图3为定子结构示意图。
19.图4为动子结构示意图。
20.图5为定子与输出轴接触的位置关系示意图。
21.图6为底座结构的示意图。
22.图7为定子机构上的圆台孔的孔口与输出轴的圆台顶尖接触和非接触状态示意图。
23.图8为旋转驱动压电片输入信号图。
24.图9为定子旋转动作原理图。
25.图10为箝位驱动压电片输入信号图。
26.图11为定子箝位动作原理图。
27.上图中序号:输出轴1、支撑滑块2、定子机构3、底座4、弹簧5、螺母6、螺杆7、通孔21、定位螺纹孔22、十字形框架31、盲孔32、水平臂33、旋转驱动压电片34、箝位驱动压电片35、柔性铰链36、固定块37、垂直臂38、输出轴圆台顶尖11、倒t型槽41、椭圆孔42、螺纹孔44、贯穿孔45。
具体实施方式
28.下面结合附图,通过实施例对本发明作进一步地说明。
29.参见图1,一种旋转压电马达包括底座4、定子机构3和动子机构。
30.参见图6,底座4为l型底座;底座4的水平底板上开有倒t型槽41,底座4的直立板为正方形框架。倒t型槽41两侧的水平底板上分别开设有一对椭圆孔42;参见图4,与一对椭圆孔42对应的支撑滑块2下部两侧分别开设有定位螺纹孔22;支撑滑块2通过螺栓和定位螺纹孔22的螺纹连接配合固定在底座4上,一对椭圆孔42实现支撑滑块2在底座4上调节位置,见图1。
31.参见图3,定子机构3包括十字形框架31、两对旋转压电片34和两对箝拉压电片35;所述十字形框架的中部开设有盲孔,盲孔为内小外大的圆台孔32;两对旋转压电片34分别固定设于十字形框架的一对垂直臂38的两侧面上,形成驱动单元;两对箝拉压电片35分别固定设于十字形框架的一对水平臂33的两侧面上,形成箝位单元。十字形框架31的一对水平臂33的悬臂端分别通过固定块37和螺栓固定连接着底座4的正方形框架的两侧边框内壁;水平臂33的悬臂端和固定块37之间设有柔性铰链36。一对垂直臂38的悬臂端与底座4的正方形框架的内壁不接触。
32.参见图4,动子机构包括输出轴1和支撑滑块2;输出轴1通过轴承贯穿设于支撑滑块2的上部,输出轴1的一端为圆台顶尖11,且输出轴1的圆台顶尖11位于十字形框架的圆台孔32内;支撑滑块2的下部与倒t型槽41配合设于底座4上;参见图1,底座4的直立板和动子机构的支撑滑块2之间设有预紧机构。预紧机构包括螺杆7、螺母6和弹簧5。螺杆7穿过底座4下部的通孔43和支撑滑块2下部的通孔21,弹簧5套装在螺母6内侧的螺杆7的外伸端上;通过调节螺母6实现预紧力的调节,实现调节工作时输出轴1的圆台顶尖11与定子3的圆台孔32内壁的接触或非接触,圆台顶尖11与圆台孔32内壁接触时,见图7中的a,圆台顶尖11与圆台孔32内壁非接触时,见图7中的b。
33.旋转压电片34的材料和箝位压电片35的材料均为pzt
‑
4型压电陶瓷片。底座4、固定块37和支撑滑块2的材料均为铸铁。柔性铰链36的材料为弹簧钢。十字形框架31和输出轴1的材料均为碳素结构钢。
34.本发明的工作原理详细说明如下:参见图8,向旋转驱动压电片34输入正弦信号。
35.参见图9,无电压信号时如图9中的a所示;时间由t0至t1,垂直臂38逆时针 摆动一个小角度,见图9中的b,十字形框架31顺时针转动一个角度;时间由t1至t2时,垂直臂38回到初始位置,见图9中的c,十字形框架31回到初始位置;时间由t2至t3,垂直臂38顺时针摆
动一个小角度,见图9中的d,十字形框架31逆时针转动一个角度;时间由t3至t4时,垂直臂38回到初始位置,见图9中的e所示,十字形框架31回到初始位置。
36.参见图10,向箝位驱动压电片35输入正弦信号。
37.参见图11,无信号时十字形框架31的状态如图11中的f所示;时间由t0至t1时,水平臂33向靠近输出轴1的方向摆动,见图11中的g,同时十字形框架31靠近输出轴1;时间由t1至t2时,水平臂33回到初始位置,见图11中的h,同时十字形框架31远离输出轴1;当时间由t2至t3时,水平臂33向远离输出轴1的方向摆动,见图11中的i,同时十字形框架31再次远离输出轴1;时间由t3至t4时,水平臂33向靠近输出轴1的方向摆动,见图11中的j,同时十字形框架31靠近输出轴1。一个循环完成。
38.在一个周期内,垂直臂38逆时针转动,此时十字形框架31顺时针转动,箝位驱动压电片35的输入信号使十字形框架31靠近输出轴1,此时定子3上的圆台槽口32与输出轴1的圆台顶尖11接触,从而驱动输出轴1顺时针旋转;当垂直臂38反向振动时,箝位驱动压电片35的输入信号使十字形框架31远离输出轴1;当垂直臂38继续逆时针转动时,此时十字形框架31继续靠近输出轴1,使得定子3上的圆台槽口32与输出轴1的圆台顶尖11接触,如此往复,可实现压电马达顺时针方向的连续转动。使驱动与箝位电压信号的相位角反向,即可实现压电马达反向转动。调整驱动与箝位电压信号的相位角及占空比可以实现不同的转速及转矩。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1