一种智能电网暂态稳定分布式自适应控制方法
1.本发明涉及一种智能电网暂态稳定分布式自适应控制方法,属智能电网控制技术领域。
背景技术:
2.智能电网的发展使其稳定控制问题日趋重要,其中暂态稳定控制是稳定控制研究的重中之重,所以备受电力学术界与工业界的关注。发电机的励磁控制和水/汽门开度控制是比较经典的方法,所设计的控制器包括有非线性励磁控制器、自适应励磁控制器、非线性自适应控制器、分散协调控制器。除了以上两种方法外,还有统一潮流控制、静止同步串联补偿器控制等方法。
3.近年来,在控制回路中引入储能装置来实现智能电网暂态稳定控制是一种新的研究思路。储能装置具有快速动作的特点,通过调节吸收或注入到发电机母线的功率大小来保持功率平衡,以快速抑制电网遭受扰动后的频率振荡。mercier p,cherkaoui r(optimizing a battery energy storage system for frequency control application in an isolated power system.ieee transactions on power systems,2009)等较早开始研究储能装置来解决暂态稳定控制问题,通过优化电池储能装置来提高系统的稳定性。kawabe k,yokoyama a(improvement of transient stability and short
‑
term voltage stability by rapid control of batteries on ehv network in power systems.electrical engineering in japan,2014)等通过结合电池储能装置和statcom装置来实现电网的广域控制。andreasson m,dimarogonas d v(distributed control of networked dynamical systems:static feedback and integral action and consensus.ieee transactions on automatic control,2014)等提出一种分布式一致比例积分(consistent proportional integral,cpi)控制器,通过控制分布式储能装置的功率输出大小来调节电网频率。由于储能装置的容量有限,而以上研究没有考虑储能装置受最大输出容量限制的情况。
4.wei j,kundur d(a flocking based paradigm for hierarchical cyber
‑
physical smart grid modeling and control.ieee transactions on smart grid,2014)等提出一种基于蜂拥理论的分布式控制器,在所有领导发电机节点处安装储能装置,提高了物理限制条件下电网的暂态稳定裕度。farraj a,hammad e(a cyber
‑
enabled stabilizing control scheme for resilient smart grid systems.ieee transactions on smart grid,2016)等提出一种参数反馈线性化(parametric feedback linearization,pfl)控制方法,且在仿真中表明了集中式pfl控制器比cpi控制器、基于蜂拥理论的分布式控制器的控制效果更优。由于pfl控制方法需要复杂的动力学模型知识,farraj a,hammad e(on the use of energy storage systems and linear feedback optimal control for transient stability.ieee transactions on industrial informatics,2017)等进一步提出一种线性反馈最优(linear feedback optimal,lfo)控
制器,提高了电网的抗干扰能力,但该控制器结构简单趋于理想化,而没有考虑模型的不确定性问题。针对电力系统中不确定非线性动力学问题,xu y l,zhang w(adistributed model
‑
free controller for enhancing power system transient frequency stability.ieee transactions on industrial informatics,2019)等提出一种自适应模糊控制方法,降低了不确定性因素对系统稳定运行的影响。ayar m,obuz s(a distributed control approach for enhancing smart grid transient stability and resilience.ieee transactions on smart grid,2017)等提出一种非线性鲁棒控制方法,提高了信息干扰下智能电网的暂态稳定裕度。
技术实现要素:
5.本发明的目的是,针对现有智能电网控制技术存在的问题和不足,为了提高智能电网的暂态稳定性,提出一种智能电网暂态稳定分布式自适应控制方法。
6.本发明实现的技术方案如下,一种智能电网暂态稳定分布式自适应控制方法,所述方法将整个智能电网看成一个可控的非线性多智能体系统,利用拓扑建模确定每台发电机的邻居发电机,并设置各发电机之间的通信权重,从而确定系统的参数矩阵;建立智能电网的动力学模型,定义各台同步发电机与其邻居发电机之间的相对功角以及相对转速,随后设计各台同步发电机的领导跟随一致性误差;利用本地发电机与其邻居发电机之间的相对功角以及相对转速信息设计分布式自适应控制器,通过调节外部储能装置的功率输出进行有功调节,以渐近消除所有同步发电机的偏差,使得系统恢复稳定。
7.所述多智能体系统采用有向图表示各个智能体之间的信息交换,记为含有n个跟随者智能体和一个虚拟领导者组成的系统通信拓扑图,b=diag{b1,b2,
…
,b
n
}表示为系统的领导跟随邻接矩阵,其中当第i个跟随者智能体通过通信网络与虚拟领导者连接时,b
i
>0,否则b
i
=0。
8.第i台发电机的邻居发电机选取原则为:第j台发电机与第i台发电机之间具有强物理耦合且空间距离较近,则第j台发电机为邻居发电机,j≠i;利用邻接矩阵a中元素a
ij
来设置通信网络中各发电机之间的通信权重,其中权重的大小表示发电机之间联系是否紧密,1为紧密,0为非紧密。
9.所述g(v,e,a)为仅由n个跟随者组成的系统通信拓扑图,有向图g由节点集v={1,2,
…
,n}、边集以及邻接矩阵a=[a
ij
]
n
×
n
表示;若e
ij
=(i,j)∈e,即(i,j)是有向图的一条边,则i定义为这条边或者节点j的父节点,j为这条边或者节点i的子节点;跟随者节点i的邻居节点的集合记为n
i
={j∈v:(i,j)∈v};邻接矩阵a中元素a
ij
定义为:对于任意的i,j∈v,节点i能从邻居节点的集合n
i
中获取信息,即j∈n
i
,a
ij
=1;否则a
ij
=0;定义有向图g的laplace矩阵l=d
‑
a,其中d=diag{d1,
…
,d
n
}表示入度矩阵,d中元素并记参数矩阵h=l+b。
[0010]
本发明将储能装置装设在发电机母线侧,利用代数图论对智能电网进行拓扑建模,将整个智能电网看成一个可控的非线性多智能体系统。假设智能电网中有n个智能体,每个智能体包括如下四个部分:一台同步发电机;一个用于测量同步发电机转子功角和转子转速的相位测量单元;一种用来处理本地发电机与其邻居发电机的转子功角以及转子转
速信息的分布式控制器;一种快速动作的外部储能装置,以调节吸收或注入到发电机母线的有功功率大小。
[0011]
另外每台发电机通过通信网络与其邻居发电机进行信息通讯,以获取邻居发电机的信息。
[0012]
所述智能电网的动力学模型由摇摆方程定义,考虑分布式自适应控制器的作用,则第i台发电机的动力学模型表示为:
[0013][0014][0015]
式中,i=1,2,
…
,n,ω
i
表示第i台发电机在同步旋转参考下的实际转速ω
act
相对于额定转速ω
nom
的偏差,单位rad/s;
[0016]
δ
i
=δ
i
'
‑
δ
i0
,δ
i
′
和δ
i0
分别为第i台发电机的实际转子功角和转子功角初值,单位rad;m
i
与d
i
分别表示第i台发电机的惯性常数和阻尼系数,单位s;p
a,i
为第i台发电机的加速功率;p
a,i
=p
m,i
‑
p
e,i
,p
m,i
与p
e,i
分别表示机械输入功率和电磁输出功率,三者均为标幺值;p
e,i
表达式如下:
[0017][0018]
式中,g
ik
=g
ki
表示第i台发电机与第k台发电机之间的等效电导;b
ik
=b
ki
表示等效电纳,均为标幺值;e
i
和e
k
分别为第i台与k台发电机的内部电压。
[0019]
考虑发电机动力学模型中存在非线性项,所以将n台发电机组成的智能电网看作一个非线性多智能体系统进行研究。因此,式重新表示为:
[0020][0021]
式中:f
i
=(
‑
d
i
ω
i
)/m
i
+(p
m,i
‑
p
e,i
)/m
i
,其中(p
m,i
‑
p
e,i
)/m
i
表示系统的非线性项。
[0022]
定义第i台同步发电机与其邻居发电机之间的相对功角以及相对转速如下:
[0023][0024][0025]
其中,z
i1
为第i台发电机与其邻居发电机之间的相对功角;z
i2
为第i台发电机与其邻居发电机之间的相对转速;a
ij
为第i台与j台发电机之间的通信权重,而权重的大小表示发电机之间联系是否紧密,1为紧密,0为非紧密;当第i台发电机与虚拟领导者之间连接时b
i
>0,b
i
为常数。
[0026]
所述领导跟随一致性误差满足以下条件:
[0027][0028]
式中e(t)=[e1,e2,
…
,e
n
]
t
,e
i
=[δ
i
‑
0,ω
i
‑
0]。
[0029]
当系统稳定运行时,发电机加速功率p
a,i
=0,这时控制器u
i
=0;当系统遭受大扰动时,加速功率偏离平衡点,切除故障线路后激活控制器,通过调节外部储能装置的功率输出进行有功调节,以平衡摇摆方程。
[0030]
利用二阶非线性多智能体系统领导跟随一致性理论,本发明提出一种分布式自适应控制方法。
[0031]
所述分布式自适应控制器设计如下:
[0032][0033][0034]
式中,ζ
i
=z
i2
+2z
i1
,i=1,2,
…
,n;χ
i
为待定的非线性函数;γ
i
≥1表示任意非递减函数,且是未知常数θ
i
的估计值;c
i
为任意正常数;u
i
为第i台发电机配置外部储能装置的控制输入。
[0035]
本发明的有益效果是,本发明利用代数图论对智能电网进行拓扑建模,该建模方法适用于所有智能电网;本发明考虑发电机动力学模型中存在非线性项,将整个智能电网看作一个非线性多智能体系统进行研究,更加符合实际电网情况;本发明将二阶非线性多智能体系统领导跟随一致性理论推广到智能电网中,解决了暂态稳定控制问题;本发明通过调节外部储能装置的功率输出进行有功调节,以平衡摇摆方程,渐近消除了所有同步发电机的偏差。
附图说明
[0036]
图1表示新英格兰39节点测试系统图;
[0037]
图2表示系统通信拓扑图和其邻接矩阵;
[0038]
图3是无外部控制下发电机频率动态;
[0039]
图4是无外部控制下发电机功角动态;
[0040]
图5是分布式自适应控制下发电机频率动态;
[0041]
图6是分布式自适应控制下发电机功角动态;
[0042]
图7表示本发明方法的步骤框图。
具体实施方式
[0043]
本发明具体实施步骤如图7所示。
[0044]
本实施例一种智能电网暂态稳定分布式自适应控制方法,步骤如下:
[0045]
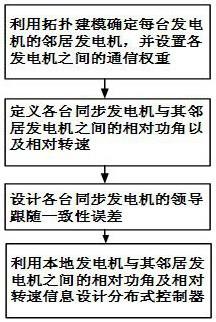
(1)利用拓扑建模确定每台发电机的邻居发电机,并设置各发电机之间的通信权重,从而确定系统的参数矩阵。
[0046]
(2)定义各台同步发电机与其邻居发电机之间的相对功角以及相对转速。
[0047]
(3)设计各台同步发电机的领导跟随一致性误差。
[0048]
(4)利用本地发电机与其邻居发电机之间的相对功角以及相对转速信息设计分布式自适应控制器,通过调节外部储能装置的功率输出进行有功调节,以渐近消除所有同步发电机的偏差,使系统恢复稳定。
[0049]
图1以新英格兰39节点测试系统为例,在matlab
‑
simulink环境中搭建该系统,并配上快速动作的外部储能装置,选取如下分布式自适应控制器:
[0050][0051]
图2表示新英格兰39节点测试系统的通信拓扑图和其邻接矩阵a。此外,在母线23(线路23
‑
24侧)设置三相接地短路故障,并且智能电网励磁稳定器处于关闭状态。
[0052]
图3和图4分别是无外部控制下第5
‑
9台发电机的频率动态和功角动态,系统内所有同步发电机失去了同步。
[0053]
图5和图6分别是分布式自适应控制下第5
‑
9台发电机的频率动态和功角动态,由于故障点靠近第7台发电机,所以第7台发电机相对于其它发电机的频率波动更大。在分布式自适应控制器作用下故障后的系统,稳定时间大约为2s,从转子功角动态曲线中也能得到相似的稳定时间。
[0054]
从仿真结果来看,所设计的控制器有效地改善了系统的暂态稳定性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1