一种无刷直流电机换相控制方法与流程
1.本发明涉及无刷直流电机换相技术领域,尤其涉及一种无刷直流电机换相控制方法。
背景技术:
2.无刷直流电机具有结构简单、体积小、功率密度高、效率高等优点,在国防、航天、航空、汽车、家电等国民经济的各个领域得到广泛应用。随着永磁材料的出现以及电子元器件的快速发展,永磁无刷直流电机应用更加广泛,小体积、高可靠的无刷直流电机驱动电路成为无刷直流电机发展的关键技术之一。
3.目前,无刷直流电机换相控制电路主要包括两种方式,第一种方式是采用位置传感器、桥式驱动电路和处理器芯片联合实现的方法,处理器芯片采集位置传感器的信号,根据换相控制算法,输出控制信号控制桥式驱动电路实现电机的换相,这种方式的优点是技术成熟、控制算法简单,但是缺点是由于需要处理器芯片和外围电路,导致电路复杂,体积大,成本较高,在低成本应用场合使用时受到限制;第二种方式是采用无位置传感器的方法,利用处理器芯片、控制算法和检测电路联合实现电机的换相,这种方式的优点是省去了位置传感器,减少了电机引线,但是缺点是检测电路和控制算法比较复杂,而且需要处理器芯片和控制算法进行结合,造成成本较高、可靠性降低、开关损耗和电机损耗较大等问题。
技术实现要素:
4.鉴于上述的分析,本发明实施例旨在提供一种无刷直流电机换相控制电路,用以解决现有电机换相控制方法可靠性差、成本高及开关损耗和电机损耗大等问题。
5.一种无刷直流电机换相控制方法,包括如下步骤:
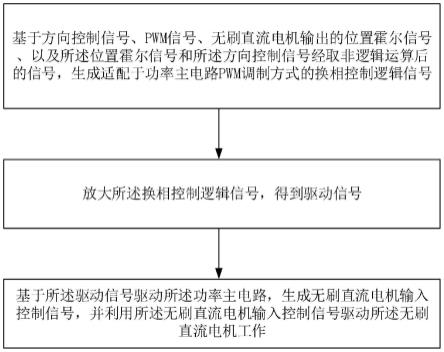
6.基于方向控制信号、pwm信号、无刷直流电机输出的位置霍尔信号、以及所述位置霍尔信号和所述方向控制信号经取非逻辑运算后的信号,生成适配于功率主电路pwm调制方式的换相控制逻辑信号;
7.放大所述换相控制逻辑信号,得到驱动信号;
8.基于所述驱动信号驱动所述功率主电路,生成无刷直流电机输入控制信号,并利用所述无刷直流电机输入控制信号驱动所述无刷直流电机工作。
9.在上述方法的基础上,本发明还做出了如下改进:
10.进一步,当所述pwm调制方式为h-pwm_l-on方式时,位置霍尔信号ha、hb、hc和方向控制信号dir与换相控制逻辑信号s1-s6的对应关系为:
11.若ha、hb、hc、dir为“1011”或“0100”,则信号s1的波形为pwm信号,信号s2、s3、s4、s5为低电平,信号s6为高电平;
12.若ha、hb、hc、dir为“1001”或“0110”,则信号s1的波形为pwm信号,信号s3、s4、s5、s6均为低电平,信号s2为高电平;
13.若ha、hb、hc、dir为“1101”或“0010”,则信号s3的波形为pwm信号,信号s1、s4、s5、
s6均为低电平,信号s2为高电平;
14.若ha、hb、hc、dir为“0101”或“1010”,则信号s3的波形为pwm信号,信号s1、s2、s5、s6均为低电平,信号s4为高电平;
15.若ha、hb、hc、dir为“0111”或“1000”,则信号s5的波形为pwm信号,信号s1、s2、s3、s6均为低电平,信号s4为高电平;
16.若ha、hb、hc、dir为“0011”或“1100”,则信号s5的波形为pwm信号,信号s1、s2、s3、s4均为低电平,信号s6为高电平;
17.其中,dir取1时电机正转、取0时电机反转。
18.进一步,所述信号s1、s3、s5分别用于控制功率主电路的上桥臂中功率管vt1、vt3、vt5的开通或关断;所述信号s2、s4、s6分别用于控制功率主电路的下桥臂中功率管vt4、vt6、vt2的开通或关断;在所述功率主电路中,vt1和vt4在一个桥臂上、vt3和vt6在一个桥臂上、vt5和vt2在一个桥臂上。
19.进一步,若s1的波形为pwm信号,信号s2、s3、s4、s5均为低电平,信号s6为高电平,则a相无刷直流电机输入控制信号ua为dc+/2和0之间的交替变换:当pwm信号取高电平时为dc+/2,当pwm信号取低电平时为0;b相无刷直流电机输入控制信号ub为0;c相无刷直流电机输入控制信号uc为由dc+/2的线性递减到-dc+/2;
20.若信号s1的波形为pwm信号,信号s3、s4、s5、s6均为低电平,信号s2为高电平,则ua为dc+/2和0之间的交替变换;uc为0;ub为-dc+/2的线性递增到dc+/2;
21.若信号s3的波形为pwm信号,信号s1、s4、s5、s6均为低电平,信号s2为高电平,则ub为dc+/2和0之间的交替变换,uc为0,ua为由dc+/2的线性递减到-dc+/2;
22.若信号s3的波形为pwm信号,信号s1、s2、s5、s6均为低电平,信号s4为高电平,则ub为dc+/2和0之间的交替变换,ua为0,uc为由-dc+/2的线性递增到dc+/2;
23.若信号s5的波形为pwm信号,信号s1、s2、s3、s6均为低电平,信号s4为高电平,则uc为dc+/2和0之间的交替变换,ua为0,ub为由dc+/2的线性递减到-dc+/2;
24.若信号s5的波形为pwm信号,信号s1、s2、s3、s4均为低电平,信号s6为高电平,则uc为dc+/2和0之间的交替变换,ub为0,ua为由-dc+/2的线性递增到dc+/2。
25.进一步,所述方法还包括:当检测到所述无刷直流电机过流时,拉低换相控制逻辑信号s2、s4和s6。
26.进一步,所述方法还包括:
27.统计检测到所述无刷直流电机过流的次数,若超过设定的过流次数阈值时,拉低换相控制逻辑信号s2、s4、s6及所述驱动信号。
28.进一步,所述方法还包括:利用清零信号清零所述无刷直流电机过流的次数。
29.进一步,基于换相控制逻辑电路生成换相控制逻辑信号;
30.所述换相控制逻辑电路包括:s1-s6逻辑控制模块,每一逻辑控制模块均由与门和或门组成,且ha、hb、hc经取非逻辑运算后的信号分别为ha1、hb1、hc1,dir经取非逻辑运算后的为dir1;其中:
31.s1逻辑控制模块包括与门1-6、或门1;与门1的两个输入端分别接收信号ha和hb1,与门2的两个输入端分别接收信号dir和pwm;与门3的两个输入端分别连接与门1和与门2的输出端;与门4的两个输入端分别接收信号ha1和hb,与门5的两个输入端分别接收信号dir1
和pwm;与门6的两个输入端分别连接与门4和与门5的输出端;或门1的两个输入端分别连接与门3和与门6的输出端,或门1的输出端输出信号s1;
32.s3逻辑控制模块包括与门7-12、或门2;与门7的两个输入端分别接收信号hb和hc1,与门8的两个输入端分别接收信号dir和pwm;与门9的两个输入端分别连接与门7和与门8的输出端;与门10的两个输入端分别接收信号hb1和hc,与门11的两个输入端分别接收信号dir1和pwm;与门12的两个输入端分别连接与门10和与门11的输出端;或门2的两个输入端分别连接与门9和与门12的输出端,或门2的输出端输出信号s3;
33.s5逻辑控制模块包括与门13-18、或门3;与门13的两个输入端分别接收信号hc和ha1,与门14的两个输入端分别接收信号dir和pwm;与门15的两个输入端分别连接与门13和与门14的输出端;与门16的两个输入端分别接收信号hc1和ha,与门17的两个输入端分别接收信号dir1和pwm;与门18的两个输入端分别连接与门16和与门17的输出端;或门3的两个输入端分别连接与门15和与门18的输出端,或门3的输出端输出信号s5;
34.s2逻辑控制模块包括与门19-24、或门4;与门19的两个输入端分别接收信号hc和ha1,与门20的两个输入端分别接收信号dir1和信号st;与门21的两个输入端分别连接与门19和与门20的输出端;与门22的两个输入端分别接收信号hc1和ha,与门23的两个输入端分别接收信号dir和信号st;与门24的两个输入端分别连接与门22和与门23的输出端;或门4的两个输入端分别连接与门21和与门24的输出端,或门4的输出端输出信号s2;
35.s4逻辑控制模块包括与门25-30、或门5;与门25的两个输入端分别接收信号ha和hb1,与门26的两个输入端分别接收信号dir1和信号st;与门27的两个输入端分别连接与门25和与门26的输出端;与门28的两个输入端分别接收信号ha1和hb,与门29的两个输入端分别接收信号dir和信号st;与门30的两个输入端分别连接与门28和与门29的输出端;或门5的两个输入端分别连接与门27和与门30的输出端,或门5的输出端输出信号s4;
36.s6逻辑控制模块包括与门31-36、或门6;与门31的两个输入端分别接收信号hb和hc1,与门32的两个输入端分别接收信号dir1和信号st;与门33的两个输入端分别连接与门31和与门32的输出端;与门34的两个输入端分别接收信号hb1和hc,与门35的两个输入端分别接收信号dir和信号st;与门36的两个输入端分别连接与门34和与门35的输出端;或门6的两个输入端分别连接与门33和与门36的输出端,或门6的输出端输出信号s6;
37.进一步,若检测到所述无刷直流电机过流或者超过设定的过流次数阈值,信号st置0;否则,信号st置1。
38.进一步,基于驱动电路生成所述驱动信号:
39.所述驱动电路中包括3个ir2110驱动芯片,每一ir2110驱动芯片用于驱动所述功率主电路中同一桥臂的上、下两个功率管;
40.若检测到所述无刷直流电机超过设定的过流次数阈值,将每一ir2110驱动芯片的sd引脚置1;否则,每一ir2110驱动芯片的sd引脚置0。
41.与现有技术相比,本发明至少可实现如下有益效果之一:
42.本发明提供的无刷直流电机换相驱动方法,仅通过1路pwm信号和1路方控制信号即可实现无刷直流电机的换相控制,此时功率主电路控制模式采用h-pwm_l-on方式,即上桥臂处于pwm斩波方式,下桥臂处于恒通或者恒断的状态,有利于降低开关损耗和电机损耗。该方法具备可靠性高、成本低等优势。
43.此外,该方法还可实现对单次瞬时过流故障的保护并可自动恢复,并通过设置过流容忍次数,可实现过流容忍次数超限持续保护,故障排除后,可通过故障清除信号对故障保护进行清除。无需专门的控制器芯片,简化了控制系统,提高了系统可靠性。
44.本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
45.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
46.图1为本发明实施例中的无刷直流电机换相控制方法流程图;
47.图2为本发明实施例中的信号整形电路;
48.图3为本发明实施例中的换相控制逻辑电路;
49.图4为本发明实施例中的驱动电路;
50.图5为本发明实施例中的功率主电路;
51.图6为本发明实施例中的无刷直流电机换相控制电路;
52.图7为本发明实施例中的带过流保护的换相控制逻辑电路;
53.图8为本发明实施例中的过流保护电路;
54.图9为本发明实施例中的故障计数与锁存电路;
55.图10为本发明实施例中的驱动电路;
56.图11为本发明实施例中的带过流保护的无刷直流电机换相控制电路。
具体实施方式
57.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
58.本发明的一个具体实施例,公开了一种无刷直流电机换相控制方法,流程图如图1所示,包括如下步骤:
59.步骤s1:基于方向控制信号、pwm信号、无刷直流电机输出的位置霍尔信号、以及所述位置霍尔信号和所述方向控制信号经取非逻辑运算后的信号,生成适配于功率主电路pwm调制方式的换相控制逻辑信号;
60.步骤s2:放大所述换相控制逻辑信号,得到驱动信号;
61.步骤s3:基于所述驱动信号驱动所述功率主电路,生成无刷直流电机输入控制信号,并利用所述无刷直流电机输入控制信号驱动所述无刷直流电机工作。
62.该方法还可以包括如下步骤:
63.步骤s4:当检测到所述无刷直流电机过流时,拉低换相控制逻辑信号s2、s4和s6。
64.步骤s5:统计检测到所述无刷直流电机过流的次数,若超过设定的过流次数阈值时,拉低换相控制逻辑信号s2、s4和s6及所述驱动信号。
65.步骤s6:利用清零信号清零所述无刷直流电机过流的次数。该步骤可在排除电流
故障后执行。
66.与现有技术相比,本实施例提供的无刷直流电机换相控制方法是配合功率主电路pwm调制方式设计的,仅通过1路pwm信号和1路方向控制信号即可实现无刷直流电机的换相控制,具备可靠性高、成本低等优势,同时有利于降低开关损耗和电机损耗。
67.需要说明的是,本实施例中的方向控制信号用于指示无刷直流电机正转或者反转,在本实施例中,当控制电机正转时,将方向控制信号dir设置为高电平;当控制电机反转时的,将方向控制信号dir设置为低电平;此外,本实施例中的pwm信号用于调节无刷直流电机的转速。可选地,pwm信号的频率可以设置为5k~20kz,pwm信号的占空比d的范围为0~1,通过改变pwm信号的占空比即可实现电机调速:占空比越大,对应的电机转速越高;占空比越小,对应的电机转速越小;占空比为1对应可调节的最高转速,占空比为0对应可调节的最低转速(即0速)。
68.在本实施例中,无刷直流电机输出的位置霍尔信号包括a相位置霍尔信号ha、b相位置霍尔信号hb、c相位置霍尔信号hc;位置霍尔信号ha、hb、hc及方向控制信号dir执行取非逻辑运算后对应的信号分别表示为ha1、hb1、hc1、dir1;基于信号ha、hb、hc、dir、ha1、hb1、hc1、dir1以及pwm信号,处理得到换相逻辑信号s1-s6;其中,信号s1、s3、s5分别为控制功率主电路的上桥臂中功率管vt1、vt3、vt5的换相控制逻辑信号;信号s2、s4、s6分别为控制功率主电路的下桥臂中功率管vt4、vt6、vt2的换相控制逻辑信号;在功率主电路中,vt1和vt4在一个桥臂上,vt1和vt4的连接点输出信号ua;vt3和vt6在一个桥臂上,vt3和vt6的连接点输出信号ub;vt5和vt2在一个桥臂上,vt5和vt2的连接点输出信号uc。信号s1-s6经驱动放大后输出驱动信号g1-g6,其中,信号s1驱动放大后输出信号g1,信号s2驱动放大后输出信号g2,信号s3驱动放大后输出信号g3,信号s4驱动放大后输出信号g4,信号s5驱动放大后输出信号g5,信号s6驱动放大后输出信号g6。功率主电路根据驱动信号g1-g6调节功率管vt1-vt6的开通或关断,并输出无刷直流电机输入控制信号ua、ub、uc,利用ua、ub、uc控制无刷直流电机旋转。具体地,信号g1、g3、g5实现pwm斩波控制,频率和占空比与输入的pwm信号相同,信号g4、g6、g2处于恒通或者恒断的状态,不进行pwm斩波,因此,功率主电路的上桥臂vt1、vt3、vt5处于pwm斩波方式,下桥臂vt4、vt6、vt2处于恒通或者恒断的状态,不进行pwm斩波。因此,当功率主电路控制模式采用h-pwm_l-on方式时,有利于降低开关损耗和电机损耗。
69.电机旋转一周,位置霍尔信号ha、hb、hc会出现六种状态,分别为“101”、“100”、“110”、“010”、“011”、“001”,假设此时pwm信号的占空比为d(占空比d的范围为0~1),那么,当pwm调制方式为h-pwm_l-on方式(即上桥臂处于pwm斩波方式,下桥臂处于恒通或者恒断的状态)时,位置霍尔信号ha、hb、hc和方向控制信号dir与换相控制逻辑信号s1-s6的对应关系为:
70.当电机正转时,dir为1;此时,
71.如果ha、hb、hc为“101”(即ha、hb、hc的状态依次为1、0、1),执行取非运算后,信号ha1、hb1、hc1为“010”,dir1为“0”,执行换相逻辑处理后,s1的波形为占空比为d的pwm信号,s2、s3、s4、s5均为低电平,s6为高电平,经驱动放大后,g1的波形为占空比为d的pwm信号,g2、g3、g4、g5均为低电平,g6为高电平,经过功率主电路时,功率主电路的vt1受到g1信号的调制而处于开通关断交替动作(g1为1时,vt1开通,g1为0时,vt1关断),功率主电路的vt2、
vt3、vt4、vt5均关断,vt6由于g6的高电平而导通,此时功率主电路的ua为dc+/2和0的交替变换(pwm信号取高电平时,vt1开通,ua为dc+/2;pwm信号取低电平时,vt1关断,ua为0),ub为0,uc为由dc+/2的线性递减到-dc+/2(在ha、hb、hc为“101”期间);
72.如果ha、hb、hc为“100”(即ha、hb、hc的状态依次为1、0、0),执行取非运算后,信号ha1、hb1、hc1为“011”,dir1为“0”,执行换相逻辑处理后,s1的波形为占空比为d的pwm信号,s3、s4、s5、s6均为低电平,s2为高电平,经驱动放大后,g1的波形为占空比为d的pwm信号,g3、g4、g5、g6均为低电平,g2为高电平,经过功率主电路时,功率主电路的vt1受到g1信号的调制而处于开通关断交替动作(g1为1时,vt1开通,g1为0时,vt1关断),功率主电路的vt3、vt4、vt5、vt6均关断,vt2由于g2的高电平而导通,此时功率主电路的ua为dc+/2和0的交替变换(vt1开通时,ua为dc+/2,vt1关断时,ua为0),uc为0,ub为由-dc+/2的线性递增到dc+/2(在ha、hb、hc为“100”期间);
73.如果ha、hb、hc为“110”(即ha、hb、hc的状态依次为1、1、0),执行取非运算后,信号ha1、hb1、hc1为“001”,dir1为“0”,执行换相逻辑处理后,s3的波形为占空比为d的pwm信号,s1、s4、s5、s6均为低电平,s2为高电平,经驱动放大后,g3的波形为占空比为d的pwm信号,g1、g4、g5、g6均为低电平,g2为高电平,经过功率主电路时,功率主电路的vt3受到g3信号的调制而处于开通关断交替动作(g3为1时,vt3开通,g3为0时,vt3关断),功率主电路的vt1、vt4、vt5、vt6均关断,vt2由于g2的高电平而导通,此时功率主电路的ub为dc+/2和0的交替变换(vt3开通时,ub为dc+/2,vt3关断时,ub为0),uc为0,ua为由dc+/2的线性递减到-dc+/2(在ha、hb、hc为“110”期间);
74.如果ha、hb、hc为“010”(即ha、hb、hc的状态依次为0、1、0),执行取非运算后,信号ha1、hb1、hc1为“101”,dir1为“0”,执行换相逻辑处理后,s3的波形为占空比为d的pwm信号,s1、s2、s5、s6均为低电平,s4为高电平,经驱动放大后,g3的波形为占空比为d的pwm信号,g1、g2、g5、g6均为低电平,g4为高电平,经过功率主电路时,功率主电路的vt3受到g3信号的调制而处于开通关断交替动作(g3为1时,vt3开通,g3为0时,vt3关断),功率主电路的vt1、vt2、vt5、vt6均关断,vt4由于g4的高电平而导通,此时功率主电路的ub为dc+/2和0的交替变换(vt3开通时,ub为-dc+/2,vt3关断时,ub为0),ua为0,uc为由-dc+/2的线性递增到dc+/2(在ha、hb、hc为“010”期间);
75.如果ha、hb、hc为“011”(即ha、hb、hc的状态依次为0、1、1),执行取非运算后,信号ha1、hb1、hc1为“100”,dir1为“0”,执行换相逻辑处理后,s5的波形为占空比为d的pwm信号,s1、s2、s3、s6均为低电平,s4为高电平,经驱动放大后,g5的波形为占空比为d的pwm信号,g1、g2、g3、g6均为低电平,g4为高电平,经过功率主电路时,功率主电路的vt5受到g5信号的调制而处于开通关断交替动作(g5为1时,vt5开通,g5为0时,vt5关断),功率主电路的vt1、vt2、vt3、vt6均关断,vt4由于g4的高电平而导通,此时功率主电路的uc为dc+/2和0的交替变换(vt5开通时,uc为dc+/2,vt5关断时,uc为0),ua为0,ub为由dc+/2的线性递减到-dc+/2(在ha、hb、hc为“011”期间);
76.如果ha、hb、hc为“001”(即ha、hb、hc的状态依次为0、0、1),执行取非运算后,信号ha1、hb1、hc1为“110”,dir1为“0”,执行换相逻辑处理后,s5的波形为占空比为d的pwm信号,s1、s2、s3、s4均为低电平,s6为高电平,经驱动放大后,g5的波形为占空比为d的pwm信号,g1、g2、g3、g4均为低电平,g6为高电平,经过功率主电路时,功率主电路的vt5受到g5信号的
调制而处于开通关断交替动作(g5为1时,vt5开通,g5为0时,vt5关断),功率主电路的vt1、vt2、vt3、vt4均关断,vt6由于g6的高电平而导通,此时功率主电路的uc为dc+/2和0的交替变换(vt5开通时,uc为dc+/2,vt5关断时,uc为0),ub为0,ua为由-dc+/2的线性递增到dc+/2(在ha、hb、hc为“001”期间);
77.当电机反转时,dir为0;此时,
78.如果ha、hb、hc为“010”(即ha、hb、hc的状态依次为0、1、0),执行取非运算后,信号ha1、hb1、hc1为“101”,dir1为“1”,执行换相逻辑处理后,s1的波形为占空比为d的pwm信号,s2、s3、s4、s5均为低电平,s6为高电平,经驱动放大后,g1的波形为占空比为d的pwm信号,g2、g3、g4、g5均为低电平,g6为高电平,经过功率主电路时,功率主电路的vt1受到g1信号的调制而处于开通关断交替动作(g1为1时,vt1开通,g1为0时,vt1关断),功率主电路的vt2、vt3、vt4、vt5均关断,vt6由于g6的高电平而导通,此时功率主电路的ua为dc+/2和0的交替变换(vt1开通时,ua为dc+/2,vt1关断时,ua为0),ub为0,uc为由dc+/2的线性递减到-dc+/2(在ha、hb、hc为“010”期间);
79.如果ha、hb、hc为“011”(即ha、hb、hc的状态依次为0、1、1),执行取非运算后,信号ha1、hb1、hc1为“100”,dir1为“1”,执行换相逻辑处理后,s1的波形为占空比为d的pwm信号,s3、s4、s5、s6均为低电平,s2为高电平,经驱动放大后,g1的波形为占空比为d的pwm信号,g3、g4、g5、g6均为低电平,g2为高电平,经过功率主电路时,功率主电路的vt1受到g1信号的调制而处于开通关断交替动作(g1为1时,vt1开通,g1为0时,vt1关断),功率主电路的vt3、vt4、vt5、vt6均关断,vt2由于g2的高电平而导通,此时功率主电路的ua为dc+/2和0的交替变换(vt1开通时,ua为dc+/2,vt1关断时,ua为0),uc为0,ub为由-dc+/2的线性递增到dc+/2(在ha、hb、hc为“011”期间);
80.如果ha、hb、hc为“001”(即ha、hb、hc的状态依次为0、0、1),执行取非运算后,信号ha1、hb1、hc1为“110”,dir1为“1”,执行换相逻辑处理后,s3的波形为占空比为d的pwm信号,s1、s4、s5、s6均为低电平,s2为高电平,经驱动放大后,g3的波形为占空比为d的pwm信号,g1、g4、g5、g6均为低电平,g2为高电平,经过功率主电路时,功率主电路的vt3受到g3信号的调制而处于开通关断交替动作(g3为1时,vt3开通,g3为0时,vt3关断),功率主电路的vt1、vt4、vt5、vt6均关断,vt2由于g2的高电平而导通,此时功率主电路的ub为dc+/2和0的交替变换(vt3开通时,ub为dc+/2,vt3关断时,ub为0),uc为0,ua为由dc+/2的线性递减到-dc+/2(在ha、hb、hc为“001”期间);
81.如果ha、hb、hc为“101”(即ha、hb、hc的状态依次为1、0、1),执行取非运算后,信号ha1、hb1、hc1为“010”,dir1为“1”,执行换相逻辑处理后,s3的波形为占空比为d的pwm信号,s1、s2、s5、s6均为低电平,s4为高电平,经驱动放大后,g3的波形为占空比为d的pwm信号,g1、g2、g5、g6均为低电平,g4为高电平,经过功率主电路时,功率主电路的vt3受到g3信号的调制而处于开通关断交替动作(g3为1时,vt3开通,g3为0时,vt3关断),功率主电路的vt1、vt2、vt5、vt6均关断,vt4由于g4的高电平而导通,此时功率主电路的ub为dc+/2和0的交替变换(vt3开通时,ub为-dc+/2,vt3关断时,ub为0),ua为0,uc为由-dc+/2的线性递增到dc+/2(在ha、hb、hc为“101”期间);
82.如果ha、hb、hc为“100”(即ha、hb、hc的状态依次为1、0、0),执行取非运算后,信号ha1、hb1、hc1为“011”,dir1为“1”,执行换相逻辑处理后,s5的波形为占空比为d的pwm信号,
s1、s2、s3、s6均为低电平,s4为高电平,经驱动放大后,g5的波形为占空比为d的pwm信号,g1、g2、g3、g6均为低电平,g4为高电平,经过功率主电路时,功率主电路的vt5受到g5信号的调制而处于开通关断交替动作(g5为1时,vt5开通,g5为0时,vt5关断),功率主电路的vt1、vt2、vt3、vt6均关断,vt4由于g4的高电平而导通,此时功率主电路的uc为dc+/2和0的交替变换(vt5开通时,uc为dc+/2,vt5关断时,uc为0),ua为0,ub为由dc+/2的线性递减到-dc+/2(在ha、hb、hc为“100”期间);
83.如果ha、hb、hc为“110”(即ha、hb、hc的状态依次为1、1、0),执行取非运算后,信号ha1、hb1、hc1为“001”,dir1为“1”,经过换相电路之后,s5的波形为占空比为d的pwm信号,s1、s2、s3、s4均为低电平,s6为高电平,经驱动放大后,g5的波形为占空比为d的pwm信号,g1、g2、g3、g4均为低电平,g6为高电平,经过功率主电路时,功率主电路的vt5受到g5信号的调制而处于开通关断交替动作(g5为1时,vt5开通,g5为0时,vt5关断),功率主电路的vt1、vt2、vt3、vt4均关断,vt6由于g6的高电平而导通,此时功率主电路的uc为dc+/2和0的交替变换(vt5开通时,uc为dc+/2,vt5关断时,uc为0),ub为0,ua为由-dc+/2的线性递增到dc+/2(在ha、hb、hc为“110”期间)。
84.优选地,可以利用信号整形电路,对位置霍尔信号和方向控制信号分别执行取非逻辑运算,信号整形电路如图2所示,由4个非门组成,用于对三相位置霍尔信号(ha、hb、hc)及方向控制信号dir分别进行反向。
85.优选地,可以基于换相控制逻辑电路生成适配于功率主电路pwm调制方式的换相控制逻辑信号;换相控制逻辑电路如图3所示,包括:s1-s6逻辑控制模块,每一逻辑控制模块均由与门和或门组成,且ha、hb、hc经取非逻辑运算后的信号分别为ha1、hb1、hc1,dir经取非逻辑运算后的为dir1;其中:s1逻辑控制模块包括与门1-6、或门1;与门1的两个输入端分别接收信号ha和hb1,与门2的两个输入端分别接收信号dir和pwm;与门3的两个输入端分别连接与门1和与门2的输出端;与门4的两个输入端分别接收信号ha1和hb,与门5的两个输入端分别接收信号dir1和pwm;与门6的两个输入端分别连接与门4和与门5的输出端;或门1的两个输入端分别连接与门3和与门6的输出端,或门1的输出端输出信号s1;s3逻辑控制模块包括与门7-12、或门2;与门7的两个输入端分别接收信号hb和hc1,与门8的两个输入端分别接收信号dir和pwm;与门9的两个输入端分别连接与门7和与门8的输出端;与门10的两个输入端分别接收信号hb1和hc,与门11的两个输入端分别接收信号dir1和pwm;与门12的两个输入端分别连接与门10和与门11的输出端;或门2的两个输入端分别连接与门9和与门12的输出端,或门2的输出端输出信号s3;s5逻辑控制模块包括与门13-18、或门3;与门13的两个输入端分别接收信号hc和ha1,与门14的两个输入端分别接收信号dir和pwm;与门15的两个输入端分别连接与门13和与门14的输出端;与门16的两个输入端分别接收信号hc1和ha,与门17的两个输入端分别接收信号dir1和pwm;与门18的两个输入端分别连接与门16和与门17的输出端;或门3的两个输入端分别连接与门15和与门18的输出端,或门3的输出端输出信号s5;s2逻辑控制模块包括与门19-24、或门4;与门19的两个输入端分别接收信号hc和ha1,与门20的两个输入端分别接收信号dir1和信号st;与门21的两个输入端分别连接与门19和与门20的输出端;与门22的两个输入端分别接收信号hc1和ha,与门23的两个输入端分别接收信号dir和信号st;与门24的两个输入端分别连接与门22和与门23的输出端;或门4的两个输入端分别连接与门21和与门24的输出端,或门4的输出端输出信号s2;s4逻辑控制
模块包括与门25-30、或门5;与门25的两个输入端分别接收信号ha和hb1,与门26的两个输入端分别接收信号dir1和信号st;与门27的两个输入端分别连接与门25和与门26的输出端;与门28的两个输入端分别接收信号ha1和hb,与门29的两个输入端分别接收信号dir和信号st;与门30的两个输入端分别连接与门28和与门29的输出端;或门5的两个输入端分别连接与门27和与门30的输出端,或门5的输出端输出信号s4;s6逻辑控制模块包括与门31-36、或门6;与门31的两个输入端分别接收信号hb和hc1,与门32的两个输入端分别接收信号dir1和信号st;与门33的两个输入端分别连接与门31和与门32的输出端;与门34的两个输入端分别接收信号hb1和hc,与门35的两个输入端分别接收信号dir和信号st;与门36的两个输入端分别连接与门34和与门35的输出端;或门6的两个输入端分别连接与门33和与门36的输出端,或门6的输出端输出信号s6。此时,信号st取1。
86.优选地,可以基于驱动电路生成驱动信号,如图4所示,包括3个ir2110驱动芯片,每一ir2110驱动芯片用于驱动所述功率主电路中同一桥臂的上、下两个功率管;上电后,每一ir2110驱动芯片的sd引脚均接低电平。功率主电路如图5所示。
87.由信号整形电路、换相控制逻辑电路、驱动电路、功率主电路相互连接得到的无刷直流电机换相控制电路如图6所示。
88.优选地,可以基于过流保护电路检测无刷直流电机是否过流:当所述过流保护电路接收到所述功率主电路输出的过流信号时,所述过流保护电路输出的过流保护信号为低电平;否则,输出的过流保护信号为高电平;所述过流保护信号输入至所述换相控制逻辑电路,当所述过流保护信号为低电平时,拉低换相控制逻辑信号s2、s4和s6。
89.优选地,可以基于故障计数与锁存控电路统计检测到所述无刷直流电机过流的次数:故障计数与锁存控电路接收所述过流保护信号,每检测到一次所述过流保护信号由高电平切换至低电平,所述故障计数与锁存电路中存储的计数值加1;当所述计数值未达到设定的计数阈值时,所述故障计数与锁存电路输出的第一锁定信号锁存为低电平、第二锁定信号锁存为高电平;当所述计数值达到设定的计数阈值时,所述故障计数与锁存电路输出的第一锁定信号锁存为高电平、第二锁定信号锁存为低电平;所述第一锁定信号输入至所述驱动电路,当所述第一锁存信号为高电平时,将所述驱动信号同时封锁为低电平;所述第二锁定信号输入至所述换相控制逻辑电路,当所述第二锁定信号为低电平时,拉低换相控制逻辑信号s2、s4和s6。优选地,所述计数值的初始值为零;当所述故障计数与锁存电路接收到清零信号后,将所述计数值清零。
90.采用过流保护电路实现对单次瞬时过流故障的保护并可自动恢复,通过故障计数与锁存电路设置过流容忍次数,可实现过流容忍次数超限持续保护,故障排除后,可通过故障清除信号对故障保护进行清除。无需专门的控制器芯片,简化了控制系统,提高了系统可靠性。
91.如图7所示,过流保护电路接收功率主电路输出的过流信号ov1,过流保护电路经上述判断后输出过流保护信号ov2,将信号ov2同时输入至换相控制逻辑电路和故障计数与锁存电路,故障计数与锁存电路经上述处理后输出第一锁定信号lock1至驱动电路、第二锁存信号lock2至换相控制逻辑电路,故障计数与锁存电路还接收清零信号clear,用于清除计数值。
92.此时,换相控制逻辑电路中的信号st由第二锁存信号lock2和过流保护信号ov2取
与逻辑运算得到,图8示出了换相控制逻辑电路;该硬件设计的思想是:若检测到无刷直流电机过流或者超过设定的过流次数阈值,信号st置0;若未检测到无刷直流电机过流且未超过设定的过流次数阈值,或者,若方法中不包括检测所述无刷直流电机过流及统计检测到所述无刷直流电机过流的次数的步骤,信号st置1。
93.示例性地,过流保护电路如图9所示:过流保护电路由电阻r1-r5、npn型三极管k1组成;其中,电阻r2的一端连接电阻r4的一端、电阻r3的一端连接电阻r5的一端,电阻r2的另一端和电阻r3的另一端相连并接收信号ov1、电阻r4的另一端和电阻r5的另一端相连并接地;电阻r2的一端还连接电阻r3的一端及电阻r1的一端,电阻r1的一端连接npn型三极管k1的基极,三级管k1的发射极接地,三极管k1的集电极经电阻r5后接电源正极,同时,三极管k1的集电极输出过流保护信号ov2。
94.示例性地,故障计数与锁存控电路如图10所示;由两片74ls161、74ls151、非门、电阻r30、电阻r31、三极管k2、选择开关及三个上拉电阻组成。其中,两片74ls161的d0-d3端、cep端及det端均接电源正极(如5v),两片74ls161的mr端相连,两片74ls161的pe端相连,其中一片74ls161的cp端接收过流保护信号ov2、q0-q3分别对应74ls151中的d0-d3、tc端连接到另一片74ls161的cp端,另一片74ls161的q0-q3分别对应74ls151中的d4-d7,74ls151的out端输出信号lock1,信号lock1反向后输出信号lock2,lock2与两片74ls161的pe端相连;74ls151的a、b、c分别连接选择开关的三个端口及上拉电阻的一端,上拉电阻的另一个另一端接电源正极。两片74ls161的mr端与三极管k2的集电极相连,集电极还经由电阻r30连接至电源正极,三极管k2的发射极接地,三极管k2的基极连接电阻r31的一端,电阻r31的另一端接收clear信号。该电路通过选择开将计数值阈值锁存至74ls151,通过两片74ls161接收ov2由高电平切换至低电平的信号,每接收一次,两片74ls161中记录的计数值加1;当两片74ls161记录的计数值与74ls151中锁存的计数值阈值相同时,第一锁定信号lock1锁存为高电平、第二锁定信号lock2锁存为低电平。还可以通过clear信号清除74ls161中的计数值。
95.此时,所述驱动电路中包括3个ir2110驱动芯片,每一ir2110驱动芯片用于驱动所述功率主电路中同一桥臂上、下两个功率管;每一ir2110驱动芯片的sd引脚均受控于第一锁定信号lock1,电路图如图11所示。该硬件设计的思想是:若检测到所述无刷直流电机超过设定的过流次数阈值,将每一ir2110驱动芯片的sd引脚置1;否则,每一ir2110驱动芯片的sd引脚置0。
96.上述带过流保护的无刷直流电机换相控制电路,电机运行过程中,如果出现瞬时过流情况,过流保护电路输出信号ov2将会为低电平,ov2经过到换相控制逻辑电路,将驱动信号s4、s6、s2同时拉低,进而使得功率主电路的下桥臂驱动信号g4、g6、g2拉低,将下桥臂封锁,确保功率主电路的安全,当下桥臂封锁之后,功率主电路的电流将会降低,过流保护电路输出信号ov2将会逐步变为高电平,ov2经过到换相控制逻辑电路,将驱动信号s4、s6、s2同时从强制拉低的状态解除,进而使得功率主电路的下桥臂驱动信号g4、g6、g2恢复正常,至此,功率主电路完成一次过流保护与恢复。过流保护电路输出信号ov2同时输入到故障计数与锁存电路,每发生一次过流,故障计数与锁存电路计数值均会增加,当计数值达到设定值,故障计数与锁存电路输出的锁定信号lock2将恒定锁存为低电平,将换相控制逻辑电路输出的信号s4、s6、s2同时拉低,进而使得功率主电路的下桥臂驱动信号g4、g6、g2拉
低,将下桥臂封锁,同时,故障计数与锁存电路输出的锁定信号lock1将恒定锁存为高电平,同时将驱动电路的sd端拉高,将驱动信号g1~g6同时封锁为低电平,将上下桥臂同时封锁,lock1和lock2实现过流保护的双保险,确保功率主电路可靠保护。当排查完故障后,可以通过clear信号由高变低实现故障清除。
97.本领域技术人员可以理解,实现上述实施例方法的全部或部分流程,可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于计算机可读存储介质中。其中,所述计算机可读存储介质为磁盘、光盘、只读存储记忆体或随机存储记忆体等。
98.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1