一种基于超声电机的激光终端的位置控制方法与流程
1.本发明涉及一种基于超声电机的激光终端的位置控制方法,属于跟踪瞄准技术领域。
背景技术:
2.激光通信指向机构(cpa)是激光通信终端的三大核心单元(指向机构、望远镜和收发通道)之一。指向机构性能的优劣将直接影响激光终端通信链路的建立,从而影响整个激光通信的成败。为了实现激光终端粗指向机构轻量化,采用能量密度更高超声电机替换永磁电机作为驱动源进行驱动控制,在降低电机重量的同时,还可取消锁紧机构的设计,有效的降低粗指向机构的重量。而 cpa工作转速极低,跟踪精度要求极高,但采用常规超声电机控制方法的工作转速较高,无法实现极低转速下的高精度控制,必须采用微步进控制方法进行驱动控制。因此,需要提出一种基于超声电机的激光终端的位置控制方法,实现新型激光终端的高精度跟踪指向。
3.基于超声电机的激光终端的粗指向机构在进行高精度跟踪控制时,面临以下问题:
4.(1)、常规的超声电机的控制基本上是频率控制,能满足1
°
/s以上的速度控制精度,而如粗指向机构这种在0.001~1
°
/s的工作速度下,很难满足控制需求。
5.(2)、指令周期短(2ms),而超声电机的微步进控制与间歇时间相关的,故导致在进行微步进控制时很难进行极低转速的控制。
6.(3)、在进行微步进位置控制时,在脉冲较大的情况下,能够获得较高的转速和力矩,但带来的微振动较大,影响光学系统的性能。
7.(4)、由于超声电机的材料机理原因,导致超声电机存在难以启动的问题。
8.《行波超声波电机多调节量协调控制方法》(中国电机工程学报,2009,第29卷,第6期)、《基于多变量变速积分的超声波电机超低转速控制策略》(中国电机工程学报,2015,第30卷,第2期)、《超声波电机的步进特性和步进定位控制》(中国电机工程学报,2004,第24卷,第1期)、《超声波电机速度与定位控制系统》(中国电机工程学报,2005,第25卷,第1期)、专利《一种超声电机驱动的双自由度旋转装置》、专利《一种超声电机超低转速控制方法》等文献分别介绍了超声电机的低速控制方法和超声波电机的位置控制方法,但上述控制方法在对基于超声电机的激光终端的位置控制时面临困难,主要体现在:(1)无论对超声电机的低速控制方法和位置控制方法均没有解决超低转速下的极高跟踪精度位置跟踪问题;(2)对激光终端面临的指令周期短的问题、静止启动问题、微振动问题均没有涉及。
技术实现要素:
9.本发明解决的技术问题是:克服现有技术不足,针对目前超声电机在1
°
/s 无法精度控制的问题,提供种基于超声电机的激光终端的位置控制方法,实现超声电机在实现在极低转速状态下高精度、高带宽的位置控制。
10.本发明解决技术的方案是:一种基于超声电机的激光终端粗指向的位置控制方法,该方法当激光终端粗指向机构的指向角度误差大于等于预设门限时,采用位置环
‑
速度环联合控制方式驱动激光终端粗指向机构;当激光终端粗指向机构的指向角度误差小于预设门限时,仅采用位置环控制方式驱动激光终端粗指向机构。
11.优选地,所述位置环
‑
速度环联合控制方式为:
12.位置环
‑
速度环联合控制方式是一种常用的位置控制方式,采用速度环闭环控制作为内环,位置环为外环,将位置指令与实际位置的误差作为输入,使用 pid控制得到速度控制指令,再将速度控制指令与实际速度之间的误差通过速度控制器得到电机控制量控制电机;
13.当激光终端粗指向终端转轴的工作转速处于高速段时,速度环采用连续控制模式进行位置控制;当激光终端粗指向终端转轴的工作转速处于低速段时,速度环采用微步进模式进行位置控制;在高速段,激光终端粗指向终端转轴的工作转速大于或等于转速门限,在低速段,激光终端粗指向终端转轴的工作转速小于转速门限。
14.优选地,当激光终端粗指向机构的指向角度误差小于预设门限时,所述位置环控制方式采用微步进控制模式进行控制。
15.优选地,所述微步进控制模式通过激光终端粗指向机构的指向角度误差大小范围采用不同频率段不同脉冲数控制超声电机微步进模式步距角的大小。
16.优选地,上述基于超声电机的激光终端粗指向的位置控制方法,还包括如下步骤:
17.采用连续模式驱动基于超声电机的激光终端粗指向机构启动,启动过程中,驱动频率采用从高到低变频方式,使得启动力矩不断增加,直至超声电机启动为止。
18.对超声电机温度进行采集,并利用已知的超声电机谐振频率与温度的变化关系曲线,获得当前温度相对于温度变化对应的频率变化δf,参考当前温度状态对超声电机驱动频率进行补偿:
19.温度补偿如下:
20.f
驱动频率
=f
常温下驱动频率
+δf
21.其中,f
驱动频率
为补偿后的驱动频率,f
常温下驱动频率
为补偿前的驱动频率。
22.优选地,所述超声电机谐振频率与温度的变化关系曲线由标定获取。
23.优选地,所述预设门限为0.1
°
~0.2
°
。所述转速门限为1
°
/sˉ3
°
/s。
24.本发明与现有技术相比的有益效果是:
25.(1)、本发明由于采用分段式多变量协调复合控制方法,在不同的误差情况下采用不同的控制方法和控制参数,有效提升粗指向机构的位置跟踪精度;
26.(2)、本发明采用温度补偿控制策略,降低空间环境温度变化对基于超声电机cpa的控制性能影响,保证在不同温度环境下,相同频率、相同控制方法性能的一致性,为基于超声电机cpa在空间环境的应用带来了极大便利;
27.(3)、本发明控制方法在大误差采用位置
‑
速度控制模式,速度环在高速段 (大于2
°
/s)利用连续模式调频控制无微振动和噪声的特点,有效降低粗指向机构在较高转速时的微振动;
28.(4)、本发明控制方法在启动过程中采用变频启动,克服超声电机静止难以启动的问题,提高了启动可靠性。
29.(5)、在实现极高跟踪精度(5urad以内)的同时,使微振动和噪声有效降低,使基于超声电机的激光终端的性能得到了大幅提升。
附图说明
30.图1为本发明实施例的位置
‑
速度控制方法框图;
31.图2为本发明实施例控制系统框图;
32.图3(a)为采用常规pid的激光粗指向机构对正弦指令的跟踪曲线 (0.23hz,0.2443
°
/s);
33.图3(b)为采用本发明控制方法的激光粗指向机构对正弦指令的跟踪曲线(0.23hz,0.2443
°
/s);
34.图3(c)为采用常规pid的激光粗指向机构对正弦指令的跟踪误差曲线 (0.23hz,0.2443
°
/s);
35.图3(d)为采用本发明的控制方法的激光粗指向机构对正弦指令的跟踪误差曲线(0.23hz,0.2443
°
/s);
36.图4(a)为采用本发明的控制方法粗指向机构的微振动图(跟踪指令为 0.23hz,0.2443
°
/s);
37.图4(b)为采用常规控制方法之间粗指向机构的微振动图(跟踪指令为 0.23hz,0.2443
°
/s)。
具体实施方式
38.下面结合实施例对本发明作进一步阐述。
39.如图1所示,激光终端粗指向机构是激光终端粗指向机构采用常用的经纬仪式的结构,驱动源采用行波式超声电机,反馈采用26位反射式光栅。
40.位置环
‑
速度环控制方式是一种常用的位置控制方式,采用速度环闭环控制作为内环,位置环为外环,如图1所示。此方法将位置指令与实际位置的误差作为输入,使用pid控制得到速度控制指令,再将速度控制指令与实际速度之间的误差通过速度控制器得到电机控制量控制电机。
41.超声电机控制主要分为连续模式和微步进模式,其中,连续模式为以频率为控制变量,实现转速和位置控制,微步进模式为以脉冲数、频率等变量,以“步进式”的形式实现电机的实现转速和位置控制。
42.本发明放弃速度环的控制,提出了一种基于行波超声电机激光终端粗指向机构的位置控制方法,控制框图如图2所示,其复合控制方法如下:
43.(1)、在基于超声电机的激光终端粗指向机构启动过程中采用连续模式驱动(以频率为控制变量,实现转速和位置控制),驱动频率不断降低的变频启动方式(驱动频率距离超声电机谐振频率越近力矩越大),不断增加启动力矩,直至电机启动为止,解决由超声电机长时间放置导致的难以启动的问题,实现超声电机的高可靠启动。
44.(2)、当激光终端粗指向机构的指向角度误差大于等于预设门限时,所述门限为0.1
°
,采用位置环
‑
速度环联合控制方式驱动激光终端粗指向机构,实现激光终端双轴对目标的平稳控制,防止大误差下位置环控制带来的步进振荡。其中,当激光终端粗指向终端转
轴的工作转速处于高速段(大于或等于2
°
/s) 时,速度环控制器采用连续控制模式(仅以频率为控制量)进行位置控制;当激光终端粗指向终端转轴的工作转速处于低速段(2
°
/s以下)时,采用微步进模式(以频率、脉冲数等为控制变量微幅步进运动)进行位置控制,弥补连续模式无法进行低速控制的缺陷。
45.速度控制方式如下:
[0046][0047]
激光终端粗指向终端的方位轴和俯仰轴的工作转速均为0.001
°
/sˉ5
°ꢀ
/s,故将2
°
/s以下划分为低速段,2
°
/s以上划分为高速段。
[0048]
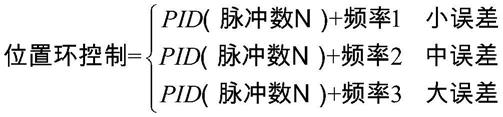
(3)、当激光终端粗指向机构的指向角度误差小于预设门限时,仅采用位置环控制方式驱动激光终端粗指向机构,控制模式为微步进控制,解决超声电机无法进行精确位置控制的缺陷(在超声电机中,频率和脉冲数与位置不是完全的线性关系)。控制方式如下:通过误差大小范围采用不同频率段不同脉冲数控制超声电机微步进模式步距角的大小,有效提升粗指向机构的位置跟踪精度,具体如下:
[0049][0050]
本发明实一具体施例中,当大误差(大于500urad),采用35.2khz驱动频率,pid控制脉冲范围为4~40;
[0051]
当中误差(大于200urad),采用35.6khz驱动频率,pid控制脉冲范围为 4~40;
[0052]
当小误差(大于50urad),采用36khz驱动频率,pid控制脉冲范围为4~40。
[0053]
本发明在低速段通过对频率和脉冲数的协调控制,有效提升粗指向机构的位置跟踪精度;在高速段利用连续模式调频控制连续性,有效降低粗指向机构在较高转速时的微振动,实现了位置跟踪精度和微振动的均衡控制。
[0054]
(4)、为了弥补超声电机自身温度变化对超声电机动态性能的影响,采用热敏电阻和ad对超声电机温度进行采集,并利用超声电机谐振频率变化与温度之间的关系,参考当前温度状态对超声电机驱动频率进行补偿,降低温度变化对超声电机的影响,保证在不同温度下采用相同频率的超声电机驱动力矩的恒定。温度补偿如下:
[0055]
f
驱动频率
=f
常温下驱动频率
+δf
[0056]
其中,δf由超声电机谐振频率与温度的变化关系曲线获得,由标定可获取;谐振频率变化相应的驱动频率也要有相应的变化,故δf施加到驱动频率即可实现补偿。
[0057]
为了验证本发明控制方法的有效性,分别对传统的位置控制方法和本发明控制方法进行了试验结果对比。由图3(a)~(d)和图4(a)~(b)中可以看出,与传统的控制方法相比,采用本发明控制方法的激光终端粗指向终端的方位轴和俯仰轴的跟踪精度由原先的60μrad降到了10μrad,微振动幅值也降低了约60%(跟踪精度和微振动对比结果如下图所示),同时控制噪声由原先 68.8db降低到48.5db(采用专业的声学测量仪器测量得到的结果)。
[0058]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域
技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1