基于放样机器人的线盒预埋方法与流程
1.本发明涉及机电安装施工领域,特别涉及一种基于放样机器人的线盒预埋方法。
背景技术:
2.在建筑主体施工阶段,机电安装的奠基工作就是水电系统管线的预留预埋。随着时代的发展,建筑市场越来越趋向于智能化、综合化,而相应的导致了建筑电气专业的功能变得更智能和复杂化。电气的预留预埋工作越来越受到重视,其预埋好坏直接影响后面机电的安装工作。目前的预留预埋基本是靠工人根据施工蓝图用经纬仪或弹线防线,配合卷尺测量进行定位预埋,不但效率低,而且极易出现错位、漏点、漏线的问题,导致后续安装时需要凿墙凿洞,不但增加造价,延误工期,还会影响主体结构的安全质量。
技术实现要素:
3.为了解决上述问题,本发明提供了一种基于放样机器人的线盒预埋方法,能够精确定位线盒安装位置,解决了传统线盒预埋方法造成的错位、漏电、漏线的问题,提升了线盒品质,降低了安装成本,缩短了施工工期。
4.本发明通过如下方案来实现:一种基于放样机器人的线盒预埋方法,包括步骤:
5.建立待预埋线盒建筑的bim模型;
6.于所述bim模型上设置线盒点位,导出线盒类型及工程量,同时导出线盒点位信息至放样机器人;
7.利用所述放样机器人根据所述线盒点位信息进行现场放样;
8.根据所述线盒类型及工程量对线盒进行预制;
9.将预制的线盒安装至对应的线盒放样点位处。
10.本发明通过bim技术和智能放样机器人测量技术的结合,可以快速实现对线盒安装位置的精确定位,解决了传统线盒预埋方法造成的错位、漏电、漏线的问题。另外,可以对线盒类型及工程量进行快速统计和导出,便于提前对线盒进行预制,提升了线盒品质,降低了安装成本,缩短了施工工期。
11.本发明基于放样机器人的线盒预埋方法的进一步改进在于,在进行现场放样之前,于所述bim模型上设置控制点,并将所述放样机器人置于现场对应于所述控制点的位置处。
12.本发明基于放样机器人的线盒预埋方法的进一步改进在于,在于所述bim模型上设置控制点时,采用后方交汇设站法根据现场测量基准点在所述bim模型的对应位置上设置所述控制点。
13.本发明基于放样机器人的线盒预埋方法的进一步改进在于,在进行现场放样的过程中,利用快速标记装置于每个线盒放样点位处进行标记。
14.本发明基于放样机器人的线盒预埋方法的进一步改进在于,所述快速标记装置的外框尺寸与所述线盒的外框尺寸相同。
15.本发明基于放样机器人的线盒预埋方法的进一步改进在于,采用激光放样模式或棱镜放样模式进行现场放样。
16.本发明基于放样机器人的线盒预埋方法的进一步改进在于,在对线盒进行预制的过程中,完成线盒杯梳的安装和密封。
附图说明
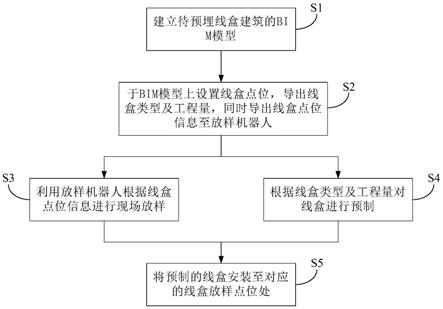
17.图1示出了本发明基于放样机器人的线盒预埋方法的流程图。
18.图2示出了快速标记装置的立体示意图。
19.图3示出了利用快速标记装置进行标记的效果示意图。
具体实施方式
20.本发明提供了一种基于放样机器人的线盒预埋方法,能够精确定位线盒安装位置,解决了传统线盒预埋方法造成的错位、漏电、漏线的问题,提升了线盒品质,降低了安装成本,缩短了施工工期。
21.下面以具体实施例结合附图对该基于放样机器人的线盒预埋方法作进一步说明。
22.参阅图1,图1示出了本发明基于放样机器人的线盒预埋方法的流程图。一种基于放样机器人的线盒预埋方法,包括步骤:
23.步骤s1、建立待预埋线盒建筑的bim模型。具体地,利用bim软件根据施工建筑、结构和机电蓝图等信息建立待预埋线盒建筑(如楼板等)的bim模型。
24.步骤s2、于该bim模型上设置线盒点位,导出线盒类型及工程量,同时导出线盒点位信息至放样机器人。具体地,将该线盒点位信息导出为能够被该放样机器人识别的格式(如rvt格式)的文件并导入放样机器人手簿。
25.步骤s3、利用该放样机器人根据该线盒点位信息进行现场放样。具体地,在进行现场放样之前,采用后方交汇设站法根据现场测量基准点在该bim模型的对应位置上设置控制点,并将该放样机器人置于现场对应于该控制点的位置处,在进行现场放样时,根据现场环境选择激光放样模式或棱镜放样模式,点击预设好的线盒放样点位,遥控进行放样。
26.步骤s4、根据该线盒类型及工程量对线盒进行预制。具体地,根据线盒类型及工程量结合项目需求按照预制线盒分类标准表进行预制和分类备用,其分类标准依据所需线盒杯梳的安装方向和数量指定。在对线盒进行预制的过程中,完成相应线盒杯梳的安装和密封,在安装完线盒杯梳后进行线盒密封,在线盒中填充木屑或泡沫等填充物,再用塑胶袋进行线盒盒口的密封。
27.步骤s5、将预制的线盒安装至对应的线盒放样点位处。具体地,在预制的线盒安装完成后,利用热缩管进行线盒杯梳与线管的连接处、以及线管与线管的连接处的密封,同时保证线盒与线管、线管与线管接驳处的接地。选择热缩管配合热风枪进行该密封施工,利用快速收缩的物理性能,使得连接处能紧密贴合,保证了密封的严密性。
28.本发明通过bim技术和智能放样机器人测量技术的结合,可以快速实现对线盒安装位置的精确定位,解决了传统线盒预埋方法造成的错位、漏电、漏线的问题。另外,可以对线盒类型及工程量进行快速统计和导出,便于提前对线盒进行预制,也就是说,上述步骤s3和步骤s4可以同时进行,不但提升了线盒品质,还降低了安装成本,缩短了施工工期。
29.作为一较佳实施方式,配合图2和图3,图2示出了快速标记装置的立体示意图,图3示出了利用快速标记装置进行标记的效果示意图。在进行现场放样的过程中,利用快速标记装置1于每个线盒放样点位处进行标记。具体地,在利用放样机器人进行放样时,于每个线盒放样点位处按照对角放样处两个放样点2,然后采用外框尺寸与线盒的外框尺寸相同的快速标记装置1(如图2所示)进行标记(标记效果如图3所示)。随着不同线盒放样点位处线盒规格的变化,选择对应规格的快速标记装置1。
30.通过上述改进,使得在现场安装线盒时,可以快速且精确地定位安装位置,避免了错位、漏电、漏线等问题,保证了机电安装质量。
31.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
技术特征:
1.一种基于放样机器人的线盒预埋方法,其特征在于,包括步骤:建立待预埋线盒建筑的bim模型;于所述bim模型上设置线盒点位,导出线盒类型及工程量,同时导出线盒点位信息至放样机器人;利用所述放样机器人根据所述线盒点位信息进行现场放样;根据所述线盒类型及工程量对线盒进行预制;将预制的线盒安装至对应的线盒放样点位处。2.如权利要求1所述的基于放样机器人的线盒预埋方法,其特征在于,在进行现场放样之前,于所述bim模型上设置控制点,并将所述放样机器人置于现场对应于所述控制点的位置处。3.如权利要求2所述的基于放样机器人的线盒预埋方法,其特征在于,在于所述bim模型上设置控制点时,采用后方交汇设站法根据现场测量基准点在所述bim模型的对应位置上设置所述控制点。4.如权利要求1所述的基于放样机器人的线盒预埋方法,其特征在于,在进行现场放样的过程中,利用快速标记装置于每个线盒放样点位处进行标记。5.如权利要求4所述的基于放样机器人的线盒预埋方法,其特征在于,所述快速标记装置的外框尺寸与所述线盒的外框尺寸相同。6.如权利要求1所述的基于放样机器人的线盒预埋方法,其特征在于,采用激光放样模式或棱镜放样模式进行现场放样。7.如权利要求1所述的基于放样机器人的线盒预埋方法,其特征在于,在对线盒进行预制的过程中,完成线盒杯梳的安装和密封。
技术总结
本发明涉及一种基于放样机器人的线盒预埋方法,包括步骤:建立待预埋线盒建筑的BIM模型;于所述BIM模型上设置线盒点位,导出线盒类型及工程量,同时导出线盒点位信息至放样机器人;利用所述放样机器人根据所述线盒点位信息进行现场放样;根据所述线盒类型及工程量对线盒进行预制;将预制的线盒安装至对应的线盒放样点位处。本发明的线盒预埋方法,能够精确定位线盒安装位置,解决了传统线盒预埋方法造成的错位、漏电、漏线的问题,提升了线盒品质,降低了安装成本,缩短了施工工期。缩短了施工工期。缩短了施工工期。
技术研发人员:韩杰 郑修文 方速昌 张海荣 杜佐龙 张世宏 崔喜莹 陈奕才 许建文
受保护的技术使用者:中国建筑第八工程局有限公司
技术研发日:2021.05.28
技术公布日:2021/9/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1