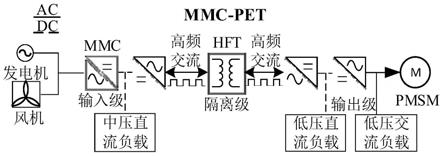
基于MMC-PET的永磁同步电机无源控制驱动系统
基于mmc
‑
pet的永磁同步电机无源控制驱动系统
技术领域
1.本发明涉及一种永磁同步电机驱动控制技术,特别涉及一种基于模块化多电平换流器(modular multilevel converter,mmc)
‑
电力电子变压器(power electronic transformer,pet)(也即mmc
‑
pet)的永磁同步电机(permanent magnet synchronous motor,pmsm)无源控制(passivity
‑
based control,pbc)驱动系统。
背景技术:
2.电力电子变压器是新兴的基于电力电子技术的新型智能电力变压器,能够完成灵活的变换电压和能量流动功能,和传统的变压器相比,具有体积小、功率密度高、噪声低、少污染等优点,在全世界都关注大力发展能源互联网的今天,其在配电网中广泛应用已成为不可避免的趋势。针对传统的pet拓扑已经提出许多结构,采用模块化多电平换流器型三级式结构具有改善电压质量、可进行有功功率交换以及增大适用范围的优势。永磁同步电机具有低惯性、结构简单、运行经济、效率高等优势,在列车牵引、风力发电等多个领域应用日益广泛。
技术实现要素:
3.为了进一步提高永磁同步电机控制性能,提出了一种基于mmc
‑
pet的永磁同步电机无源控制驱动系统,将mmc
‑
pet适用于高电压、大功率电力系统的优势与pmsm无源控制相结合,保证正常电压变换的同时,系统更稳定。
4.本发明的技术方案为:一种基于mmc
‑
pet的永磁同步电机无源控制驱动系统,采用输入级、中间级和输出级的3级式结构向无源网络供电;
5.输入级:高压电通过模块化多电平换流器mmc对三相交流进行整流;
6.中间级:采用串联输入、并联输出的双有源桥式变换器对输入级输出直流电进行隔离降压;
7.输出级:采用三相全桥逆变器,三相全桥逆变器输出连接永磁同步电机。
8.优选的,所述输入级的mmc由每相上、下2个桥臂三相共6个桥臂构成,每个桥臂都由n个子模块sm与桥臂电感l
s
和桥臂等值电阻r
s
相互串联而成;每一个sm都采用半桥的结构,包含2个反并联了二极管的igbt和1个并联在2个串联igbt两端的储能电容c。
9.优选的,所述输入级的mmc的控制方法:
10.根据mmc拓扑结构,根据kirchhoff定律,可得mmc换流器的数学模型为:
11.[0012][0013]
式中:u
sa
、u
sb
、u
sc
分别为输入高压端三相交流电压;i
sa
、i
sb
、i
sc
分别为输入mmc换流器的三相交流电流;l0、r0分别为三相高压端与mmc换流器每相连接线路电感和电阻;u
a
、u
b
、u
c
分别为mmc换流器输出三相直流电压;u
dc
为mmc换流器的输出直流电压;u
jp
、u
jn
分别为第j相上、下臂电压;i
jp
、i
jn
分别为第j相上、下臂电流;j=a、b、c三相;
[0014]
由上式得mmc交流侧电磁暂态方程为:
[0015][0016]
其中,
[0017][0018]
式中:i=1,2...,n;j=a,b,c;n为单个桥臂上子模块的数量;u
sj
、i
sj
分别为第j相三相交流电源电压、电流;r
eq
、l
eq
分别为mmc的等效电阻、等效电感;s
j
为第j相开关控制变量,与上下桥臂投入的sm数量有关,目的是控制mmc交流侧的输出电压;s
jpi
、s
jni
为第j相上、下桥臂第i个子模块的开关函数;
[0019]
由mmc换流器的数学模型可得直流侧在abc坐标系下的电磁暂态方程为:
[0020][0021]
式中:为直流侧电压的期待值;l
s
为桥臂电感;c
eq
为上、下桥臂的等效电容;i
dc
为直流侧电流;
[0022]
将mmc换流器的数学模型经过abc
‑
dq0变换,可得在dq旋转坐标系下的数学模型为:
[0023][0024]
式中:u
sd
、u
sq
和i
sd
、i
sq
为三相电压和电流在d、q轴上的分量;s
d
、s
q
为s
j
在d、q轴上的分量;ω为角速度;
[0025]
对直流侧在abc坐标系下的电磁暂态方程求导数运算,在将直流电流波动省去不计的前提下,即其中的直流侧电流的微分项求导量,可推得:
[0026][0027]
将上式变换到dq轴坐标系下可得:
[0028][0029]
将dq坐标系下的mmc换流器数学模型分电流内环、电压外环进行pid控制。
[0030]
优选的,所述中间级的双有源桥式变换器采用输入均压控制:双有源桥式变换器包括输入端dc
‑
ac变换器、ac
‑
ac变换器、输出端ac
‑
dc变换器3个子模块,u
inn
为串联侧各子模块输入电压,n=1,2,3;u
out
、u
out_ref
分别为直流侧输出电压测量值、参考值,两者的差值通过pi调节后输出各个子模块移向比参考值d
sh_ref
;u
in_av
为子模块输入电压平均值,各子模块输入电压u
inn
与输入电压平均值u
in_av
的差值通过pi调节后输出各子模块移相比修正量δd
shk
,k=1,2,3;各子模块移相比修正量δd
shk
和参考值d
sh_ref
的差值作为对每子模块的移相比的控制值。
[0031]
优选的,所述输出级连接的永磁同步电机建立基于耗散哈密尔顿pchd的pmsm模型,pmsm模型采用无源控制。
[0032]
优选的,所述基于耗散哈密尔顿pchd的pmsm模型无源控制设计方法:为使pmsm在平衡点x
*
达到稳定状态,利用反馈构建闭环期望的能量函数h
d
(x),令其在x
*
处取最小值,即在x
*
的一邻域内满足h
d
(x)>h
d
(x
*
),设计反馈控制律u=β(x),将闭环系统表示为:
[0033][0034]
式中:j
d
(x)、r
d
(x)为期望的互联矩阵、阻尼矩阵,它们满足下面关系:
[0035][0036]
若反馈律u=β(x),r
a
(x)、j
a
(x)和k(x)满足关系:
[0037][0038]
式中:r
a
(x)、j
a
(x)分别为决定系统性能的函数;当r
a
(x)、j
a
(x)取0时系统收敛速率不可控,系统性能不好;当j
a
(x)=0和r
a
(x)≠0时系统收敛速率由r
a
(x)控制,控制性能较好,因此本发明在设计无源控制器时选取j
a
(x)=0和r
a
(x)≠0的方案;且满足下面条件:
[0039][0040]
那么该闭环系统是pchd系统,x
*
是此闭环系统的一个局部渐进稳定的平衡点,
[0041]
式中:h
a
(x)为反馈注入该系统的待定能量函数。
[0042]
本发明的有益效果在于:本发明基于mmc
‑
pet的永磁同步电机无源控制驱动系统,
将mmc
‑
pet与pmsm驱动相结合,两者优势结合具有体积小、重量轻、变换效率高、系统性能佳等优势。
附图说明
[0043]
图1为本发明基于mmc
‑
pet的永磁同步电机无源控制驱动系统结构示意图;
[0044]
图2为本发明系统中mmc的结构框图;
[0045]
图3为本发明系统中输入均压的控制框图;
[0046]
图4为在电网平衡与不平衡状态下直流侧输出电压仿真图;
[0047]
图5为本发明实施例mmc输入级子模块电容电压仿真图;
[0048]
图6为本发明实施例输入模块电压仿真图;
[0049]
图7为本发明实施例中间级输出电压仿真图;
[0050]
图8为本发明实施例空载运行时电机转速仿真图;
[0051]
图9为本发明实施例空载运行时电机转矩仿真图;
[0052]
图10为本发明实施例空载运行时a相定子电流仿真图;
[0053]
图11为本发明实施例恒速运行时电机转速仿真图;
[0054]
图12为本发明实施例恒速运行时电机转矩仿真图;
[0055]
图13为本发明实施例恒速运行时a相定子电流仿真图;
[0056]
图14为本发明实施例变速运行时电机转速仿真图;
[0057]
图15为本发明实施例变速运行时电机转矩仿真图;
[0058]
图16为本发明实施例变速运行时a相定子电流仿真图;
[0059]
图17为本发明实施例变负载运行时电机转速仿真图;
[0060]
图18为本发明实施例变负载运行时电机转矩仿真图;
[0061]
图19为本发明实施例变负载运行时a相定子电流仿真图。
具体实施方式
[0062]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0063]
本发明涉及一种基于mmc
‑
pet的永磁同步电机无源控制驱动系统,下面对系统构成和控制方法一一阐述。
[0064]
1、向无源网络供电的mmc
‑
pet系统结构和工作原理为:
[0065]
图1为连接pmsm的mmc
‑
pet系统结构图。由图可见,pet系统采用输入级、中间级和输出级的3级式结构,其中:
①
输入式采用mmc结构的三相整流器,高压的发电机、风机等可连接到输入级;
②
中间级采用串联输入、并联输出的双有源桥式变换器;
③
输出级采用三相全桥逆变器,输出级连接永磁同步电机。
[0066]
图2为mmc的拓扑结构。由图2可见,mmc由每相上下2桥臂三相共6个桥臂构成,每个桥臂都由n个子模块(sub module,sm)与桥臂电感l
s
和桥臂等值电阻r
s
相互串联而成。每一个sm都采用半桥的结构,包含2个反并联了二极管的igbt(s
p
、s
n
)和1个并联在2个串联igbt两端的储能电容c。根据2个igbt的s
p
、s
n
开关状态的不同,在正常运行时,sm可呈现两种工作
状态,分别为投入状态和切除状态。当sm为投入状态时,s
p
(t1)导通,s
n
(t2)关断,此时子模块的输出电压为电容电压u
c
。当sm为切除状态时,s
p
(t1)关断,s
n
(t2)导通,此时子模块的输出电压为电容电压0。
[0067]
2、根据mmc拓扑结构,根据kirchhoff定律,可得mmc换流器的数学模型为:
[0068][0069][0070]
式中:u
sa
、u
sb
、u
sc
分别为输入高压端三相交流电压;i
sa
、i
sb
、i
sc
分别为输入mmc换流器的三相交流电流;l0、r0分别为三相高压端与mmc换流器每相连接线路电感和电阻;u
a
、u
b
、u
c
分别为mmc换流器输出三相直流电压;u
dc
为mmc换流器的输出直流电压;u
jp
、u
jn
分别为第j相上、下臂电压;;i
jp
、i
jn
分别为第j相上、下臂电流;j=a、b、c三相;
[0071]
由式(1)、式(2)得mmc交流侧电磁暂态方程为:
[0072][0073]
其中,
[0074][0075]
式中:i=1,2...,n;j=a,b,c;n为单个桥臂上子模块的数量;u
sj
、i
sj
分别为第j相三相交流电源电压、电流;r
eq
、l
eq
分别为mmc的等效电阻、等效电感;s
j
为第j相开关控制变量,与上下桥臂投入的sm数量有关,目的是控制mmc交流侧的输出电压;s
jpi
、s
jni
为第j相上、下桥臂第i个子模块的开关函数。
[0076]
由式(2)可得直流侧在abc坐标系下的电磁暂态方程为:
[0077][0078]
式中:为直流侧电压的期待值;l
s
为桥臂电感;c
eq
为上、下桥臂的等效电容;i
dc
为直流侧电流。
[0079]
3、三相静止坐标系
‑
两相旋转坐标系的转换:将mmc换流器的数学模型经过abc
‑
dq0变换,可得在dq旋转坐标系下的数学模型为:
[0080][0081]
式中:u
sd
、u
sq
和i
sd
、i
sq
为三相电压和电流在d、q轴上的分量;s
d
、s
q
为s
j
在d、q轴上的分量;ω为角速度。
[0082]
对式(4)求导数运算,在将直流电流波动省去不计的前提下,即忽略式(4)中的直流侧电流的微分项求导量,可推得:
[0083][0084]
将式(6)变换到dq轴坐标系下可得:
[0085][0086]
将dq坐标系下的mmc换流器数学模型分电流内环、电压外环进行pid控制。
[0087]
mmc采用双闭环控制,电压外环用定直流电压控制,内环用pid控制法,使直流电压维持稳定、有功功率维持稳定。其控制过程为:正负序分离系统将采集到的电压电流信号进行dq坐标转换,输出信号传送至电压外环控制器中,电流参考信号和其他量送入pid控制器中,构造出开关函数,配合环流抑制控制,将信号传送至载波移相调制模块中,以维持整流侧直流电压和有功功率。
[0088]
4、针对中间级dab采用输入均压控制。
[0089]
输入均压的控制结构框图如图3所示。图中,u
inn
(n=1,2,3)为串联侧各子模块(输入端dc
‑
ac变换器、ac
‑
ac变换器、输出端ac
‑
dc变换器)输入电压;u
out
、u
out_ref
分别为直流侧输出电压测量值、参考值,两者的差值通过pi调节后输出各个子模块移向比参考值d
sh_ref
;u
in_av
为子模块输入电压平均值,各子模块输入电压u
inn
与输入电压平均值u
in_av
的差值通过pi调节后输出各子模块移相比修正量δd
shk
(k=1,2,3);各子模块移相比修正量δd
shk
和参考值d
sh_ref
的差值作为对每子模块的移相比的控制值。控制器最终输出各子模块实际移相比。此控制方法控制简单有效,能达到较好的均压效果。
[0090]
5、对于输出级连接的永磁同步电机pmsm,基于耗散哈密尔顿模型(port controlled hamiltonian with dissipation modeling,pchd)建立pmsm模型。
[0091]
永磁同步电机状态方程形式下的pchd模型为:
[0092][0093]
式中:x为状态变量,x∈r
n
;u、y为输入、输出变量,u、y∈r
m
;r(x)为端口阻尼矩阵,r(x)=
‑
r
t
(x)≥0;j(x)为系统内部互联矩阵,j(x)=
‑
j
t
(x);h(x)、f(x)、g(x)分别为能量存储、状态变量、输入变量系数函数。
[0094]
三相abc静止坐标系下的pmsm电压方程为:
[0095][0096]
pmsm磁链方程为:
[0097][0098]
式中:下标3s表示三相abc静止坐标系;u
3s
为三相绕组相电压;r为电机电阻;i
3s
为电机电流;ψ
3s
、l
3s
、f
3s
(θ
e
)分别为绕组磁链、电感和磁动势;θ
e
、分别为转子电气位置角、定子磁链。上述变量可表示为:
[0099][0100]
式中:l
m3
、l
l3
分别为定子的互感、漏感。
[0101]
电磁转矩及运动方程的表达式为:
[0102][0103][0104]
式中:ω
r
、n
p
和θ
m
分别为转子机械转速、极对数和机械位置角;j、b分别为转动惯量、阻尼系数,其中b较小,可作忽略处理。
[0105]
将模型转换至dq旋转坐标系的变换矩阵p为:
[0106][0107]
通过park变换可得到dq坐标系下pmsm的数学模型为:
[0108][0109]
式中:u
d
、u
q
为定子电压d、q轴分量;i
d
、i
q
为定子电流d、q轴分量;为定子磁链d、q轴分量;r为定子电阻。
[0110]
定子磁链方程为:
[0111][0112]
将式(15)代入式(14),可得dq坐标系下电压方程为:
[0113][0114]
式中:l
d
、l
q
分别为d、q坐标系下的定子电感。
[0115]
电磁转矩方程为:
[0116][0117]
阻尼系数b省略不计,可推出机械方程为:
[0118][0119]
式中:t
e
、t
l
分别为电磁转矩、负载转矩。
[0120]
pmsm的状态变量x、输入变量u、输出变量y分别定义为:
[0121][0122][0123]
式中:d为对角矩阵,d=diag{l
d
,l
q
,j}。
[0124]
pmsm能量存储函数h(x)表达式为:
[0125][0126]
pmsm的dq数学模型用式(8)表示成pchd模型形式为:
[0127][0128][0129]
其中,
[0130][0131]
6、针对基于pchd模型的pmsm进行无源控制设计。
[0132]
为使pmsm系统在平衡点x
*
达到稳定状态,利用反馈构建闭环期望的能量函数h
d
(x),令其在x
*
处取最小值,即在x
*
的一邻域内满足h
d
(x)>h
d
(x
*
)。设计反馈控制律u=β(x),将闭环系统表示为:
[0133][0134]
式中:j
d
(x)、r
d
(x)为期望的互联矩阵、阻尼矩阵。它们满足下面关系:
[0135][0136]
若反馈律u=β(x),r
a
(x)、j
a
(x)和k(x)满足关系:
[0137][0138]
式中:r
a
(x)、j
a
(x)分别为决定系统性能的函数,本发明中取r
a
(x)≠0,j
a
(x)=0。
[0139]
且满足下面条件:
[0140][0141]
那么该闭环系统是pchd系统,x
*
是此闭环系统的一个局部渐进稳定的平衡点。
[0142][0143]
式中:h
a
(x)为反馈注入该系统的待定能量函数。
[0144]
7、为验证本发明方法的优势,本实施例依照连接pmsm的mmc
‑
pet系统,基于matlab/simulink搭建仿真模型进行了仿真对比实验。模型的pmsm和mmc
‑
pet参数如下:
[0145]
表1
[0146][0147][0148]
具体仿真效果为:
[0149]
按照系统设定值,输入级高压侧连接20kv交流系统,设置电网平衡状态、电网a相电压降至18kv的不平衡状态,在这两种状态下直流母线输出电压如图4所示。由图4可见,无论网侧电压是否出现不平衡状态,直流侧输出电压都基本稳定在20kv,为后续中间级进行dc/dc变换提供了条件。其中mmc输入级的子模块电压如图5所示,它稳定于4.0kv,子模块数量为10。
[0150]
经过输入均压控制,稳态时单个dc
‑
dc变换器直流侧电压波形如图6所示。由图6可见,3个串联输入、并联输出的子模块电压均分布在6666.66v~6666.68v之间,波动幅度<1%,输入均压效果理想。
[0151]
中间级输出电压如图7所示。由图7可见,dc
‑
dc隔离级将低压侧直流电压稳定在700v,为后面输出级的逆变提供了条件。
[0152]
8、为了验证pmsm在各种运行条件下均能稳定运行,设置电机空载运行、恒速运行、变速运行、变负载运行4种工况下将基于mmc
‑
pet的pmsm的无源控制(pbc)驱动与pid控制驱动分别进行仿真比较。
[0153]
(1)空载运行
[0154]
经过mmc
‑
pet的电压变换,输出级电压稳定于700v,在负载转矩t
l
=0n
·
m(空载)、转速n=1000r/min的情况下对整体系统进行仿真。空载运行时电机转速、转矩、a相定子电流的仿真曲线如图8~10所示。
[0155]
由图8可见,与pid控制相比,无源控制下pmsm的转速超调量明显降低,几乎接近于
零,稳定时间缩短,后者比前者提速0.002s;由图9可见,与pid控制相比,无源控制下pmsm转矩波动较小、波形更为平滑,具有更好的动态性能;由图10可见,无源控制下a相定子电流波形平滑,0.015s后即稳定在0a。
[0156]
(2)恒速运行
[0157]
设定系统0.7s投入负载转矩t
l
=10n
·
m、转速设定为n=1000r/min的情况下对整体系统进行仿真。此时电机转速、转矩、a相定子电流的仿真曲线如图11~13所示。
[0158]
由图11可见,与pid控制相比,无源控制下pmsm的转速超调量明显降低,几乎为零,稳定时间明显缩短,后者比前者提速0.03s;由图12可见,与pid控制相比,无源控制下pmsm转矩几乎无波动,稳定时间更短,具有更好的动态性能;由图13可见,无源控制下a相定子电流波形平滑,0.01s后即稳定于设定电流值。
[0159]
(3)变速运行
[0160]
设定系统恒负载转矩t
l
=10n
·
m、转速在1.0s由n=1000r/min降为n=800r/min的情况下对整体系统进行仿真,此时电机转速、转矩、a相定子电流的仿真曲线如图14~16所示。
[0161]
由图14可见,与pid控制相比,无源控制下pmsm的转速超调量明显降低,几乎为零,抗干扰能力更强,稳定时间明显缩短,后者比前者提速0.025s;由图15可见,与pid控制相比,无源控制下pmsm转矩波动明显减小,超调量更低,具有更好的动态性能;由图16可见,无源控制下a相定子电流波形较为平滑,0.004s后即稳定于设定电流值。
[0162]
(4)变负载运行
[0163]
设定系统负载转矩在1.1s时由t
l
=10n
·
m增加为t
l
=15n
·
m、转速恒为1000r/min的情况下对整体系统进行仿真,此时电机转速、转矩、a相定子电流的仿真曲线如图17~19所示。
[0164]
由图17可见,与pid控制相比,无源控制下pmsm的转速超调量明显降低,几乎为零,抗干扰能力更强,稳定时间明显缩短,后者比前者提速0.03s;由图18可见,与pid控制相比,无源控制下pmsm转矩波动较小几乎没有、稳定时间更短,具有更好的动态性能;由图19可见,无源控制下a相定子电流波形无抖动,可达到平滑切换的效果。
[0165]
综上所述,本发明提出了一种基于mmc
‑
pet永磁同步电机的无源控制驱动系统,将mmc
‑
pet适用于高电压、大功率电力系统的优势与pmsm无源控制相结合,并从理论上证明了该控制系统的稳定性。最后在matlab/simulink仿真平台分为空载运行、恒速运行、变速运行、变负载运行4种不同工况进行了仿真验证,通过理论与实验分析得到下述结论:
[0166]
1)3级式mmc
‑
pet系统在完成基本电压变换的同时适用于高电压、大功率场合,适用范围更广,与pmsm的结合可为更高电压场合提供了应用前景。
[0167]
2)与pid控制相比,本发明所提出的无源控制策略具有更加优良的动、静态性能,且参数选择更为简便。
[0168]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1