从压电梁的约束屈曲收集能量
从压电梁的约束屈曲收集能量
1.本技术为于2018年3月13日提交、申请号为201680053067.9、发明名称为“从压电梁的约束屈曲收集能量”的中国专利申请的分案申请。所述母案申请的国际申请日为2016年8月12日,国际申请号为pct/us2016/046807。
2.相关申请的交叉引用
3.本技术要求于2015年8月13日提交的美国临时申请第62/204,695号的权益。上述申请的全部公开内容通过引用并入本文。
技术领域
4.本公开内容涉及从压电梁的约束屈曲收集能量。
5.
背景技术:
和
技术实现要素:
6.本部分提供与本公开内容有关的背景信息,其不一定是现有技术。本部分提供本公开内容的概述,而不是本公开内容的全部范围或其全部特征的全面公开。
7.根据本教示,提供具有压电梁的压电振动能量收集器,以在经过的车辆或人群的重量下生成电力。当装置被踩踏或以其他方式按压时,压电梁屈曲至受控程度。能量收集器可以具有水平或竖直构造。水平构造更容易安装,并且可以被调整至低传递载荷。装置的移动元件是一个或更多个压电梁,例如均匀双晶片梁或分段梁。分段梁的端部是简单的弹簧钢或黄铜,而中心跨度是压电双晶片。
8.压电梁在水平构造中是水平的。在这种构造中,竖直交通工具载荷通过剪刀状机构被转换成水平屈曲力。该机构包括七个刚性链接。在竖直构造中,压电梁是竖直的,并且直接承受交通工具载荷。竖直(直接)构造被设计成在交通工具的载荷下屈曲。这引起压电件的显著变形并且产生大量的电力。如果梁的屈曲不受控制,则将引起梁的断裂。梁的屈曲变形通过限制其轴向变形来约束。
9.为了更好地控制屈曲梁的轴向变形,变形必须是明显的。这要求梁的长度很长。随着梁的长度增加,其轴向变形变得更加显著。为了降低本能量收集器的成本,针对屈曲部件而言,分段梁优于均匀梁。该选择使得能够在不需要更多使用昂贵的压电元件的情况下具有大轴向变形。
10.在本公开内容中,对能量收集器进行解析建模。机电耦合和几何非线性已经被包含在压电梁的模型中。对该装置的设计准则进行了讨论。已经证明,该装置可以利用常用的压电贴片来实现,并且可以产生数百毫瓦的功率。设计参数对所生成的功率和所需要的公差的影响进行了说明。
11.本装置可以在人行道上实施,从经过本装置的人的重量来产生能量。其他可能的应用是便携式智能电话充电器和鞋跟能量收集。俱乐部的舞场是使用该收集器的另一适用示例。竖直装置可以在道路上实施,利用经过的车辆的重量来产生电力。该装置不易共振,并且从经过的每个轮胎产生显著的电力量。因此,其可以用作自给式传感器以用于交通控制。
12.根据本文提供的描述,其他应用领域将变得明显。本发明内容中的描述和具体示
例意在仅用于说明的目的,而非意在限制本公开内容的范围。
附图说明
13.本文描述的附图仅用于选择的实施方式而非所有可能的实现的说明目的,而非意在限制本公开内容的范围。
14.图1是针对均匀梁的屈曲梁的示意图。
15.图2示出了针对均匀梁的能量收集装置的竖直构造。
16.图3示出了针对分段梁的能量收集装置的竖直构造。
17.图4a示出了屈曲之前的水平能量收集装置;图4b示出了屈曲之后的水平能量收集装置。
18.图5是矩阵b的行列式的对数与不同β的对数的关系的图。
19.图6是示出均匀梁(虚线)与中间具有两个压电层的分段梁的挠度的表。
20.图7示出了收集器的电路。
21.图8示出了第一临界屈曲力(下表面)与第二临界屈曲力。
22.图9是均匀梁处于屈曲位置的示意图。
23.图10a示出了梁的无量纲挠度;图10b绘制了跨800ω电阻负载的瞬时功率。
24.图11是竖直分段梁处于屈曲位置的示意图。
25.图12a示出了梁的无量纲挠度;以及图12b示出了跨17.5kω电阻负载的瞬时功率。
26.图13示出了平均输出功率与不同电阻的关系。
27.图14示出了具有支撑件的水平分段梁。
28.图15a示出了水平装置中的分段梁的无量纲位移;图15b示出了使用20.4kω电阻负载产生的最大功率。
29.图16示出了使用不同电阻的平均功率。
30.图17示出了在水平构造中θ角和横梁长度(l0)对间隙距离的影响。
31.图18示出了压电部件的厚度和长度对间隙距离的影响。
32.图19示出了具有厚压电层(t
s
=0.03英寸,t
p
=0.02英寸)的分段梁与均匀梁(虚线)的挠度。
33.图20示出了压电部件的厚度和长度(米)对平均生成功率(瓦特)的影响。
34.图21示出了本教示的具有单个压电梁的收集器的透视图。
35.图22示出了本教示的具有双压电梁的收集器的透视图。
36.图23是图22的收集器的侧视图。
37.图24是图22的收集器的放大侧视图。
38.贯穿附图的若干视图,对应的附图标记表示对应的部分。
具体实施方式
39.现在将参照附图更全面地描述示例实施方式。
40.提供示例实施方式以使得本公开内容将是详尽的,并且将向本领域技术人员充分地传达本公开内容的范围。阐述了许多具体细节,例如具体部件、装置和方法的示例,以提供对本公开内容的实施方式的全面理解。对于本领域的技术人员而言明显的是,不需要采
用具体细节,示例实施方式可以以许多不同的形式来实施,并且都不应当被解释为限制本公开内容的范围。在一些示例实施方式中,并未详细描述已知的过程、已知的装置结构和已知的技术。
41.本文使用的术语仅出于描述特定示例实施方式的目的,而非意在是限制性的。如本文所使用的,除非上下文另有明确指示,否则单数形式“一”、“一个”和“该”也可以意在包括复数形式。术语“包括”、“包括有”、“包含”和“具有”是包含性的,因此说明存在所述特征、整体、步骤、操作、元件和/或部件,但不排除存在或添加一个或更多个其他特征、整体、步骤、操作、元件、部件和/或其组。除非具体指定执行的顺序,否则本文中所描述的方法步骤、过程和操作不应被解释为必须要求它们以所讨论或示出的特定顺序来执行。还应当理解的是,可以采用附加步骤或替代性步骤。
42.当元件或层被称为“在
…
上”、“接合至”、“连接至”或“耦接至”另一元件或层时,该元件或层可以直接在另一元件或层上、接合至另一元件或层、连接至另一元件或层或者耦接至另一元件或层,或者可以存在中间元件或中间层。相反,当元件被称为“直接在
…
上”、“直接接合至”、“直接连接至”或“直接耦接至”另一元件或层时,可以不存在中间元件或中间层。应当以相似的方式来解释用于描述元件之间的关系的其他词语(例如,“在
…
之间”与“直接在
…
之间”、“相邻”与“直接相邻”等)。如本文中所使用的,术语“和/或”包括相关联的列出项目中的一个或更多个的任何及所有组合。
43.尽管可以在本文中使用术语第一、第二、第三等来描述各种元件、部件、区域、层和/或部段,但这些元件、部件、区域、层和/或部段不应当受限于这些术语。这些术语可以仅用于将一个元件、部件、区域、层或部段与另一区域、层或部段区分开来。术语例如“第一”、“第二”和其他数字术语在本文中使用时,除非由上下文明确指示,否则不暗含序列或顺序。因此,在不背离示例实施方式的教示的情况下,下面所讨论的第一元件、部件、区域、层或部段可以被称为第二元件、部件、区域、层或部段。
44.为了便于描述,在本文中可以使用与空间相关的术语,例如“内”、“外”、“下面”、“下方”、“下”、“上方”、“上”等,以对如图中所示的一个元件或特征与另一(些)元件或特征的关系进行描述。与空间相关的术语可以意在包括装置的除了图中描绘的取向之外在使用或操作时的不同的取向。例如,如果图中的装置被翻转,则被描述为在其他元件或特征的“下方”或“下面”的元件然后将会被定向成在其他元件或特征的“上方”。因此,示例术语“下方”可以包括上方和下方两种取向。装置可以以其他方式被定向(被旋转90度或以其他取向旋转),并且本文中使用的与空间相关的描述被相应地解释。
45.引言
46.近年来,能量收集装置已经引起了工业和制造业的极大兴趣。将环境能量转化成电能的独特能力已经引起若干学术和商业团体来分析和开发能量收集技术。通常,产生的电力被存储在电容器或电池中。r.anton等人已经对能量收集的领域及其创建自供电装置的现状进行了评述。振动是能量收集中的常见源中的一种。david p.arnold已研究了使用包括振动的不同能量源的紧凑型磁发电机。此外,zhongjie li对电磁能量收集器在振动能量收集器中的应用进行了建模和分析。将振动转换成电力的另一常用方法是通过使用压电材料。
47.许多团体已经研究了使用振动和压电效应。压电效应将机械应变转化成电流或电
压。压电材料在机械变形时均会产生小电压。在cook
‑
chennault及其团队的尝试中,研究了从压电材料收集能量。压电收集器能够实现各种应用:便携式充电器、战场装备的电源、自动上发条手表等。beeby和他的团队研究了包括压电材料的无线自供电的微系统的能量收集。在由roundy和wright进行的研究中,研究了用于无线传感器的基于振动的压电发电机。在他们的文章中,研究了压电振动至电力转换器的设计,并且他们的装置的目的是用作无线电子设备的电源。
48.压电梁使得可以从振动结构收集能量。用于能量收集的一种振动源是由经过的车辆引起的桥梁的振动。在该方法中,能量源于经过的交通工具,转至桥梁并且引起桥梁的振动。该振动通过压电能量收集器装置被转换成电能。当能量从交通工具转至桥梁时,能量分布在非常大的结构上。因此,由振动能量收集器吸收的能量是由交通工具浪费的能量的非常小的一部分。这是传统的桥梁振动能量收集方法的第一个缺点。常规装置的第二个缺点是,只有在常规装置被安装在桥梁上时才有用。道路的规则部分的振动没有大到足以产生显著的电能。振动能量收集器的第三个缺点是它们有限的频率带宽。这一问题近年来受到了极大的关注,目前仍在讨论中。
49.为了避免这种现象,我们可以直接使用经过的车辆或人群的力来产生电力。根据本教示的一些实施方式,提供了通过均匀梁的压电贴片从经过的车辆的振动收集能量。
50.根据本原理,公开了竖直构造和水平构造。在一些实施方式中,如图1至图3所示,竖直放置的压电梁被用于利用道路上经过的交通工具的载荷来直接产生电力。通常,压电陶瓷在受到集中应力时易碎并且容易断裂。为了避免低周疲劳,压电贴片被结合至硬质材料例如金属或碳纤维复合材料。虽然这种方法防止了贴片的断裂,但是会降低电力生成。在本装置中,梁的屈曲量被限制和控制,因此低周疲劳不会成为本装置的一个问题。
51.本装置是可伸缩的并且可以被设计成适合鞋跟。这将使得可以利用人的每一步产生电力。电力可以用于对智能电话、播放器或运动传感器进行充电。传感器可以在没有电池的情况下进行操作,并且传感器的尺寸将会减小。在一些实施方式中,收集器可以用作自行车中的悬挂机构,并且利用自行车的振动以产生电力。
52.在本公开内容中,首先对两种设计构造(竖直构造和水平构造)进行说明。对水平构造和竖直构造二者均进行建模,并且呈现了装置的振动和能量收集特性的机电模型。对所述模型进行数值求解以预测装置的性能。最后,还讨论了活动层的长度和厚度对所生成的功率的影响。
53.装置构造
54.首先,我们研究能量收集器装置10的竖直构造,这是更平常的情况。能量收集器装置10可以包括安装在第一锚定点14与第二锚定点16之间的竖直梁12。第一锚定点14可以被配置成是静止的(例如地面),或者可以被配置成能够沿一定方向移动以引起竖直梁12的挠曲。第二锚定点16可以耦接至可移动构件18例如被形成为被向上驱动的板,这引起第二锚定点16的竖直挠曲和竖直梁12的相应的弯曲移动或挠曲。在一些实施方式中,竖直梁12可以包括被布置在中心的钢或黄铜层18,所述钢或黄铜层18具有安装至其以与其一起移动的两个压电层20、22。然而,应该理解,可以仅使用一个压电层20。竖直梁12特别是钢或黄铜层18和压电层20、22的弯曲移动或挠曲致使由于压电层20、22的变形而产生电力。装置的竖直构造(图1)特别适合安装在路面上。然而,其可以用在存在竖直脉冲的任何应用中。
55.如图2所示,本装置10被安装在道路的表面上,使得交通工具直接经过本装置10。因此,将机械振动转换成电能的换能元件是竖直压电双晶片12(18、20、22)。在该设计中探寻两个关键目标。第一个目标是拥有一个鲁棒的能量收集装置,即从每个经过的轮胎产生能量。第二个目标是使能量的量最大化,并且在压电层20、22中引起最大量的应力。第三个目标是拥有耐用的装置。因此,期望将压电层20、22中的最大应力限制为用于高周疲劳的允许应力水平。通过实施止动构件24,我们确保屈曲量是受控的,并且压电梁将不会由于过度的应力而损坏。
56.图3示出了竖直构造中的分段梁。压电梁的轴向变形应该在毫米范围内以产生可行的δ间隙。该轴向变形随着梁的长度而显著增加。在毫米范围内的轴向变形要求梁的长度为数十厘米的级别。为了在不显著增加梁的成本的情况下增加梁的长度,我们需要使用压电陶瓷仅覆盖梁的一部分。使用压电陶瓷覆盖的部分是梁的处于最大弯曲应力下的部分。对于销钉梁,该部分将是梁的中间部段。如图3所示,该梁由三个不同的部分或部段30、32、34构成。梁的第一部分30和第三部分34仅是简单的弹簧钢层,而中间部分32是具有表面上的两个活动层20、22和两个活动层20、22之间的一个弹簧钢或黄铜层18的双晶片压电梁。压电层在屈曲时以及在力被移除时产生电力。当力被移除时,梁倾赴于回到其未变形的位置。
57.在一些实施方式中,提供能量收集器装置40的水平构造。如图4a和图4b所示,能量收集器装置40可以包括通过枢轴关节彼此连接的七个梁。更特别地,上水平梁42和下水平梁44以平行布置来设置。在一些实施方式中,上水平梁42和下水平梁44由钢制成。然而,应该理解,上水平梁42和下水平梁44可以由足以传送施加的力的任何期望材料制成。此外,上水平梁42和下水平梁44可以与周围结构例如街道、道路、人行道、鞋底和其他结构合并并且形成整体。中间梁46布置在上水平梁42与下水平梁44之间,并且可以由一个或更多个压电梁(例如分段双晶片压电梁)构成。在一些实施方式中,中间梁46具有在中间梁46的表面上的两个活动压电层48、50以及布置在两个活动压电层48、50之间的一个弹簧钢或黄铜层52。应该再次理解,在一些实施方式中,可以使用单个压电层48。收集器装置40还包括将上水平梁42的端部与中间梁46的端部互连并且同样将下水平梁44的端部与中间梁46的端部互连的相对斜梁54、56、58、60。斜梁54、56、58、60可以倾斜,使得它们指向内部并且响应于正在竖直施加的力f而产生被施加在中间梁46上的压缩载荷。该装置的第一个目标是将机械力转化成电力。
58.书写静态控制方程:
[0059][0060]
其中,f是装置顶部上的力,p是活动梁两端上的力,并且θ是顶部梁与斜梁(l0)之间的角度。δ是间隙距离,并且δ是在梁46屈曲之后分段梁46中的缩短。如在式(1)中所看到的,如果角度小于45度,则p将大于f。这意味着机构放大了竖直力。在这种情况下,水平构造在活动梁上产生较大的力,而在收集器上方仅产生非常小的力(f)。该特征使得该收集器对于便携式装置和无法使用大的力的应用而言是理想的。收集器40的特殊设计使其容易放置
在人行道中或放置在跑步机下方,其中,装置上方的力不大。具有小于45度的角度的另一优点是间隙距离(δ)的增加。如式(1)所示,在δ的量相同的情况下,当角度减小时,间隙距离增加,这使得装置的构建更容易并且更实用。如果角度大于45度,则p将小于f,这使得该配置适合安装在道路上以及安装在大的力下。通过增加角度,我们确保在分段梁上施加的力将不会超过允许的量,并且将不会引起梁的损坏。
[0061]
建模和控制方程
[0062]
通过结合屈曲梁和压电能量收集双晶片的偏微分方程来推导出控制压电梁的振动的偏微分方程。机械控制方程是:
[0063][0064]
其中,m是梁的每单位长度的总质量,w(x,t)是沿y轴(图1)的挠度。ei是组合梁的等效弯曲刚度,p是轴向力,k
eq
是活动梁的等效刚度,α是压电耦合系数,并且v是跨并联连接的压电元件的电压。梁的宽度由b表示,衬底的厚度为t
s
,并且压电层的厚度为t
p
。δ(x)是满足下式的狄拉克δ(dirac delta)函数:
[0065][0066]
并联连接的耦合项α可以书写为:
[0067][0068]
其中,e
13
是压电系数。如果力超过临界屈曲力,则梁屈曲。在本公开内容中,我们假定力大于第一临界载荷并且小于较高模态的临界载荷。所以,我们只需要在我们的计算中考虑一阶屈曲振型。对于屈曲和未屈曲情况二者,自由振动振型被认为是振型。梁的自由振动方程可以表示为:
[0069][0070]
自由振动的解可以被表示为梁的所有自然运动的线性组合(部分11):
[0071][0072]
其中,φ
j
是第j阶自然振型,并且t
j
是时间函数。将式(6)代入式(5)中,分段梁的通解可以用以下形式建立:
[0073][0074]
其中,i是第i个梁截面,并且j表示第j阶振型,a
i1
、a
i2
、a
i3
、a
i4
和β
j
根据边界条件来计算,并且c
i
为:
[0075][0076]
在均匀简支梁的情况下,式(7)简化为:
[0077][0078]
由于分段梁的振动振型不会像均匀梁一样保持一致,所以针对每个部分考虑梁的
自由振动的一般形式(式(7))。梁有三段;因此,每个部分的挠曲形状均不相同。所以,总共有12个未知系数(α
11
,α
12
,
…
,α
34
)。在两端处存在四个边界条件。挠度(φ)和弯矩(eiφ
″
)为零。
[0079]
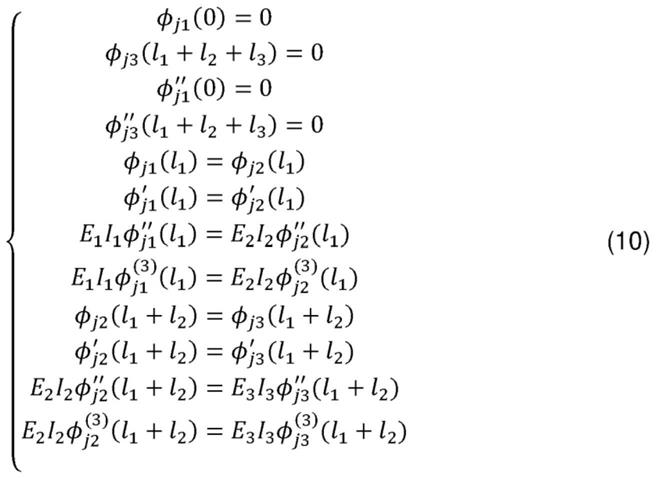
由于连续性和平衡条件,我们在每个界面处有四个条件。换言之,在这些点处,两侧应该具有相同的挠度、斜率、剪切力和弯矩。两端处的四个边界条件和两个界面处的八个等式形成以下12个等式:
[0080][0081]
其中,φ
j1
是第一部分的挠度,φ
j2
是梁的中间部分的挠度,φ
j3
是梁的第三部分的挠度。e和i是弹性模量和惯性矩。φ
′
ji
表示每个部分的斜率,e
i
i
i
φ
″
ji
是梁的弯矩,并且是梁的剪切力。找到这些系数的一种方式是得到12个等式并且将其以矩阵形式书写:
[0082]
ba=0
ꢀꢀ
(11)
[0083]
其中,b是12x12矩阵,并且a被定义为:
[0084]
a=[a
11 a
12 a
13 a
14 a
21 a
22 a
23 a
24 a
31 a
32 a
33 a
34
]
t
ꢀꢀꢀ
(12)
[0085]
非平凡解仅在矩阵b的行列式为零的情况下才存在。为了找到使行列式为零的β,我们根据不同的β来绘制矩阵b的行列式的对数。图5的曲线图中的第一个下降与一阶振型的频率相关联。为了找到精确的频率,我们使用将该频率用作初始推测的newton
‑
raphson方法。曲线图中的第二个下降是二阶振型的频率,并且下一个下降与下一个固有频率相关联。在本文中,我们仅需要前两个频率以便找到前两阶振型和它们的临界屈曲力。
[0086]
如果b矩阵的行列式为零,则该方程组不存在唯一的解答。所以为了求解该方程组,应该消除一个等式。接下来,假定向量a的分量中的一个分量的值,并且基于该分量找到其他11个剩余系数。我们需要检查来查看任意分量的选择是否恰当。在一些情况下,系数向量中的该假设分量为零。这意味着我们的第一个假设是不正确的,并且我们需要将另一元素作为假设分量。为了检查以查看假设是否正确,我们移除了矩阵b的一行和一列。该列是与该假设系数相关联的列。在移除一行和所述列之后,我们检查了剩余方阵的秩。如果在这种情况下秩是n
–
1、11,则这意味着我们的假设是正确的,并且我们可以继续。但是,如果秩
小于n
‑
1,则这意味着我们需要移除另一行而不是被移除的一行,并且再次检查秩。如果在移除一行之后形成的所有这些矩阵均不具有n
‑
1的秩,则这意味着我们的第一个假设不恰当,并且我们需要将另一元素作为假设分量。
[0087]
找到系数的第二种方法是使用变换矩阵来减小12
×
12矩阵。在本文中,每当我们想指代使用减小初始矩阵的大小的这种方式时,我们将其命名为变换矩阵方法。通过使用该方法,我们应该计算4
×
4矩阵的行列式,而不是12
×
12矩阵。当我们具有大矩阵时,该方法将会显示计算时间的显著差异。虽然在我们的例子中,第一矩阵(12
×
12)不是很大,但是由于用于优化装置的数值计算的量很大,我们使用变换矩阵方法。当进行优化部分时,该方法非常有用并且节省时间。为了找到梁的最优厚度或长度,我们需要针对每种构造进行新的数值计算。考虑到不同构造的数量,使用该方法显著减少了总的计算时间。
[0088]
如前面所提到的,我们在梁的每个端部处具有两个边界条件,总共四个条件。考虑到在梁的两端处的这些边界条件,我们有:
[0089][0090]
其中,b
c0
和b
ce
基于式(10)来书写:
[0091][0092][0093]
x
*
是l1+l2+l3。此外,存在四个等式将第一部分与第二部分相关联,并且存在超过四个等式将梁的第二部分与第三部分相关联(梁的变形是连续的)。
[0094][0095]
其中
[0096][0097]
[0098]
其中
[0099][0100]
x
*
是l1还是l1+l2取决于我们是在第一段与第二段的交叉处书写连续性和平衡方程还是我们是否在第二段与第三段的交叉处书写连续性和平衡方程。最后我们有:
[0101][0102]
以及:
[0103][0104]
如果我们结合式(19)和式(20),则我们会得到:
[0105][0106]
因此,矩阵b被定义为:
[0107][0108]
我们接下来找到使得矩阵b的行列式等于零的β的值。对式(10)中的等式的数量和式(22)中的矩阵的大小进行比较,表明初始系数矩阵的大小(12
×
12)减小至4
×
4矩阵。如前面所提到的,使用变换矩阵方法的主要优点是减小矩阵的大小,这显著减少了数值计算。当初始矩阵的大小增加时,总的计算时间的减少是相当大的。此外,该公式的另一优点是避免了可能导致数值错误的行列式的极大值。
[0109]
在我们的计算中,我们使用质量归一化振型,使得它们满足由下式给出的条件:
[0110][0111]
图6对在轴向力作用下分段挠曲梁的变形形状和均匀梁的变形形状进行了比较。为了验证所述方法,我们考虑特殊情况:我们假设中间部段的压电层的厚度为零。如所预期的,挠曲形状与均匀梁的挠曲形状相同。针对两种情况均检查临界屈曲力,并且临界屈曲力也是相同的。
[0112]
在找到梁的挠度之后,我们在式2中用替换w(x,t),并且我们使该式预先乘以振型。如果我们对该表达式从零至梁的长度进行积分:
[0113][0114]
由于振型的正交,该式被解耦:
[0115][0116]
其中,m
k
是第k阶模态的模态质量。如前面所提到的,我们考虑质量归一化振型;c是阻尼比,k代表线性刚度,由于轴向力而引起的刚度系数的降低为p,n是非线性系数,并且耦合系数为β。针对均匀梁的这些积分进行了解析计算:
[0117][0118]
对式(26)中的积分进行数值计算。梁的临界屈曲力是使p等于k的轴向力p的量。
[0119]
图7示出了能量收集器的等效电路。使用基尔霍夫定律的控制方程是:
[0120][0121]
其中,r
l
为负载电阻,并且压电件的电容为其中,n为压电层的数量(在本装置中为2)。在止动件被接合之前的控制方程是:
[0122][0123]
如果轴向力小于临界载荷,则零挠度将是稳定的平衡点。当轴向力超过第一临界载荷时,代表非线性平衡点的模态坐标是:
[0124][0125]
式(2)中的控制微分方程在止动件被接合之前有效。当支撑件被接合时,轮胎力被施加至支撑件,并且式(28)无效。在那种情况下,梁的轴向位移被固定在设计的凹槽处(图2)。在这种情况下,问题从固定轴向受力问题改变为固定轴向位移问题。轴向位移梁的振动的控制方程被表示为:
[0126][0127]
式(30)中显示的模型暗含轴向固定位移δ的作用与轴向力k
eq
δ的作用相同。不幸的是,该模型似乎并不正确。式(3)的第一个不正确结果是关于梁的静态轴向变形。在静态情况下,梁的轴向变形必须等于δ。梁的轴向变形由下式给出:
[0128][0129]
对于均匀梁,从式(30)和式(31)得到的轴向变形是这与边界条件相矛盾。我们建议正确的等效轴力应该为其中,p
c
是临界载荷。该值与d=δ一致。在以下思维实验中,两个值之间的差异变得明显。假定铰接件之间的距离是比原始长度短的较小量(ε)。由于中性轴的缩短可以忽略,所以梁必须屈曲以适应边界条件。因此,等效轴向力应该大于临界屈曲载荷。该条件由我们修正的等效载荷来满足,但与现有技术中的表达式相矛盾(参见附录a中的参考文献34)。因此,我们建议正确的公式是:
[0130][0131]
因此,在止动件被接合之后,代替式(28),控制方程是:
[0132][0133]
参数定义与式(28)中的参数定义类似。唯一的区别是由于轴向力而引起的刚度系数的降低:
[0134][0135]
在该式中,p
c
是屈曲的第一临界载荷,并且p
stp
是当止动件被撞击时来自梁的反作用力。对于分段构造,我们有:
[0136]
p
stp
=k
eq
d
max
ꢀꢀ
(35)
[0137]
其中,d
max
是当止动件被撞击时梁的缩短,并且k
eq
是分段梁的等效刚度。
[0138][0139]
如所提到的,屈曲的临界力被定义为使式(28)的线性部分为零(p=k)的力的量。因此,临界力是:
[0140][0141]
对于均匀梁,p
e
和p
c
的值等于:
[0142]
[0143][0144]
其中,n是屈曲模态的编号。对于竖直构造,梁的最大缩短(d
max
)等于装置与支撑件之间的间隙(δ)。基于式(1),对于水平构造,与这两个值相关的等式为:
[0145]
δ=d
max cot(θ)
ꢀꢀ
(39)
[0146]
设计
[0147]
当装置上方存在力时,梁会屈曲。这种屈曲引起瞬时振动,其产生电力。屈曲继续,直到止动件被撞击为止。基于梁的缩短公式(式(31)),梁的最大缩短量(d
max
)与梁内的最大允许应变的二次方(∈
max2
)成比例:
[0148]
d
max
∝
∈
max2
ꢀꢀ
(40)
[0149]
允许应变与允许应力的关系如下:
[0150][0151]
σ
yp
、σ
ys
是钢和压电件的屈服应力,并且e
p
、e
s
是压电材料和衬底的弹性模量。对于分段梁,我们没有将d
max
与∈
max
相关联的精确方程。为了找到d
max
,首先计算梁的缩短、d0以及∈0。∈0是基于梁的变形的梁内的最大应变。应该注意,该值不同于根据式(41)计算的梁内的最大允许应变(∈
max
)。
[0152][0153][0154]
注意,对于均匀梁,最大应变出现在梁的中间处。在下一步中,基于式(40)和式(42),我们可以找到梁的最大允许缩短(d
max
)。为了找到d
max
,我们应该针对衬底和压电层二者计算该值:
[0155][0156]
这些值中的每一个均较小,应该被认为是梁的最大缩短。使用最大缩短,我们可以找到δ的值。应该调整由间隙δ标识的支撑件位置以防止梁的断裂。在设计装置时,我们应该注意的其他事情是该系统被设计成具有低阻尼系数以增强电力生成。结果是,梁的屈曲可能超过静态屈曲。因此,在定义间隙值时应该格外小心,以避免压电梁的断裂。
[0157]
该解决方案被划分成不同的部分:第一部分是,力在装置上方并且梁向下移动直到梁撞击支撑件为止的情况。在该部分中,式(2)是压电梁的振动的控制方程。在梁屈曲之后,支撑件被接合,式(32)是系统的控制方程。当力被移除时,压电梁赴于弹回,并且式(2)给出了系统的解。由于在这种情况下在收集器上方不存在力,所以在式中p等于零。由于式(2)和式(32)均是非线性的,因此我们使用数值积分来对模型进行求解,并且预测由能量收集装置产生的电力。
[0158]
为了设计该装置,我们需要确保轴向应力小于梁的压电部分和衬底部分的屈服应力。如果力超过该限制,则轴向应力将会损坏收集器。水平构造可以在跑步机或人行道上实施,利用收集器上方经过的人群的载荷。因此,我们期望上梁上的力的量大约是人的重量。
由于在装置上方跳跃或奔跑的情况下该力将变得较大,因此在我们的设计中我们考虑安全因数。与水平设计相同,对于可以在道路上实施以使用经过的车辆的力来产生电力的竖直构造,我们考虑安全因数以确保装置不会在车辆的重量下损坏。下一步是检查该力是否大于梁屈曲的第一临界载荷。临界屈曲力基于式(37)来计算。为了计算第一临界屈曲力,一阶振型需要作为式(37)中的φ(x)的替换,并且为了计算第二临界屈曲力,二阶振型需要作为式(37)中的φ(x)的替换。类似地,为了计算第n屈曲临界力,式(37)中的φ(x)由第n阶振型替换。由于通常存在与较高模态相关联的电荷消除,因此在我们的设计中我们仅利用一阶屈曲振型。因此,压电梁上的力必须大于第一临界载荷并且小于第二临界载荷。针对压电层的不同厚度和长度示出了第一临界屈曲力和第二临界屈曲力。对于均匀简支梁,使用式(38)来计算临界屈曲力。如式所示,均匀梁中的第二临界屈曲力是第一临界屈曲力的四倍。关于分段梁的有趣结果是,第二临界屈曲力与第一临界屈曲力的比率随着中间部分的长度和厚度而变化。图8示出了竖直构造中的分段梁的第一临界屈曲力和第二临界屈曲力。随着中间部分的长度减小,临界力及其比率二者均增加。针对我们的设计,分段梁上方的期望的力应该保持在曲线图中示出的这两个表面之间。
[0159]
结果
[0160]
在本部分中,我们研究三种不同的情况。第一种是竖直(直接)构造中的均匀梁。第二种情况是具有分段梁的竖直构造。在这两种情况下,装置上方的力均被认为是车辆的重量。最后一种情况是水平(间接)构造中的分段梁。该装置被设计成利用人的重量产生电力。针对所有三种情况计算输出功率和间隙尺寸,并且最终研究设计参数对输出功率和间隙尺寸的影响。
[0161]
作为第一种情况,我们研究使用均匀梁的直接构造的案例研究(图9)。具有0.02英寸(254μm)厚的钢衬底和0.01英寸pzt
‑
5a压电贴片的2英寸(50.8mm)长并且1英寸(25.4mm)宽的压电双晶片满足用作振动能量收集器中的弯曲元素的所有上述要求。使用由mide'生产的商业quickpack作为压电元件。
[0162]
图10a示出了梁的无量纲挠度。量纲挠度示出了振荡的幅度(w)除以在梁中产生屈服应力的幅度。当无量纲挠度等于一时,梁在边界处。如果该值超过一,则意味着梁被损坏,并且我们需要改变设计。如果轴向力增加,则自由振荡的幅度增加,并且量纲挠度曲线图中的峰值变大。这增加了输出功率的量。此外,如果力被施加至装置的时间增加,则振动幅度减小直到其达到零。随着该时间增加,平均输出功率减少。可以得出结论:如果在很短的时间内在收集器上方存在大的力(类似于撞击),则实现最佳功率输出。还感兴趣的是,在安全止动件被接合之后,梁继续振荡。换言之,梁的运动在几乎每一时刻处均是完全动态和振荡的。
[0163]
在图10b中绘制了跨800ω电阻负载的瞬时功率,当压电层在无轴向力下以其基本自然频率振荡时,电阻负载的值与压电层的阻抗匹配(式(44))。图10b中的用于生成电力的平均功率是52mw。间隙距离为1.38μm,与装置的尺寸相比较,间隙距离太小。该间隙尺寸使得这种设计在道路上实施是不切实际的。
[0164]
接下来,我们使用分段梁而不是均匀梁来研究两种构造(图11)。对于直接构造,来自piezo systems公司的psi
‑
5a4e压电片可以被用作压电元件。我们可以使用具有0.05英寸厚的钢衬底和0.04英寸厚的psi
‑
5a4e(压电材料)压电贴片的长2.85英寸并且宽1.00英
寸的压电双晶片梁。梁的第一部分和第三部分的长度是1.425英寸,并且中间部分的长度是2.85英寸。
[0165]
图12a示出了梁的无量纲挠度,并且图12b示出了跨17.5kω电阻负载的瞬时功率。
[0166]
如曲线图所示,大部分电力是在力被移除之后产生的。为了确保使用最优电阻,针对不同电阻来计算平均功率在图13中示出存在用于产生最大功率的电阻。当电阻等于16kω时,我们具有最大的生成功率。大多数时间,该电阻接近如下计算的电阻:
[0167][0168]
其中,c是压电层的电容,并且w是梁的自然频率。力被施加至收集器的持续时间假定为0.1秒。在力被移除之后,梁弹回。图12b中的用于产生电力的平均功率是176.3mw。
[0169]
对于间接构造(图14),我们可以使用具有0.07英寸厚的钢衬底和0.04厚的压电贴片(来自piezo system公司的psi
‑
5a4e)的长2.85英寸并且宽2.85英寸的压电双晶片梁。通过在我们的装置中使用该梁,我们确保力大于第一临界载荷并且还小于第二临界载荷。斜梁(图4中的l0)的长度是3英寸,并且上梁与斜梁之间的角度(图4中的θ)是利用该角度,我们确保存在用于使梁屈曲的足够的力。如果我们减小角度,则使装置屈曲所需要的力将会更小,但是具有非常小的西塔(theta)角使得装置的构建不切实际,并且总是存在应当考虑的构建限制。轴向载荷的安全系数为13.6,并且衬底和压电层的安全系数为2(针对这些层,屈服应力假定为40mpa和250mpa)。由于即使在止动件被撞击之后梁的运动也是振荡的,所以在设计的最后步骤中考虑其他安全系数。该装置相对于竖直构造的主要优点在于,顶部梁与支撑件之间的间隙增加。更大的间隙将会使得该装置的构建和实施更容易。
[0170]
图15a示出了水平装置中的分段梁的无量纲位移。力被施加至收集器的持续时间假定为0.5秒。由于水平装置上方的力被假定为人的重量,因此力的持续时间(其是每一步的持续时间)比竖直情况大。与竖直构造相同,在力被移除之后,梁弹回至零平衡位置。生成的平均功率为14.4mw。考虑到我们使用人的重量来在收集器中产生电力的事实,产生的电力是显著的。图16示出了使用不同电阻的平均功率。使用20.4kω的电阻负载生成最大功率(图15b)。其他小的力(例如通过手施加的力)也可以被使用在该装置上。
[0171]
如前面所提到的,相对于均匀梁使用分段梁的最重要的优点在于,放置支撑件的间隙距离的增加。在使用水平构造的情况下,该间隙距离甚至会增加更多。水平装置的案例研究的间隙距离为0.8mm,其大于竖直构造(约10倍),并且远大于均匀梁(超过500倍)。
[0172]
在装置的水平构造中,通过增加西塔(theta)角,间隙距离也增加。在减小西塔(theta)角以具有更大的间隙尺寸之前,应该考虑构建限制。横梁的长度不会显著影响该距离(图17)。因此,可以得出结论:施加至分段梁的力以及水平装置中的间隙距离中的一个非常重要的参数是θ角。
[0173]
在图18中还示出了水平装置中压电层的长度及其厚度的影响。如图中所示,随着压电层的长度(梁的中间部分)增加,delta(放置止动件的距离)增加。
[0174]
通过增加压电层的厚度,起初间隙距离增加,但是在某点之后间隙距离开始减小。原因是因为在某点之后,压电件的厚度不是使梁损坏的决定性因素。对于薄的压电层,衬底将损坏而不是压电层。因此,确保压电层和衬底二者的安全性很重要。在图19中示出了具有
厚压电层和薄钢层的梁的挠曲形状。因为梁在中部厚得多,所以连接至梁的中间部分的第一部分或第三部分更容易受到损坏。
[0175]
在图20中示出了活动层(压电层)的厚度以及梁的中间部分的长度的增加对竖直装置的输出功率的影响。通过增加中间部分的长度,装置所生成的功率也增加。随着长度增加,梁的总刚度降低,这引起梁的更大振动。当振动增加时,输出功率也增加。如前面所提到的,梁的输出功率随着压电层的厚度增加至一定的极限。除此之外,梁的中间部分的刚度增加,并且实际上中间部分不会振动如此多,并且结果是,所生成的功率降低。
[0176]
替选构造
[0177]
在使用由四个压电贴片覆盖的较短的单个弹簧钢梁的情况下,对鞋能量收集器(l=11.00”,w=3”,h=1.87”)进行的测试产生32.89mw的最大功率输出。该输出表明从利用较长的黄铜衬底的先前原型的项目(l=15.75”,w=3”,h=2”)的大幅增加。这些结果证明弹簧钢衬底值得研究,因为其功率输出超过任何其他原型的功率输出。该功率是在不使用止动机构的情况下产生的,并且建议在具有内置止动机构的双梁构造中使用弹簧钢。预测在使用双梁而不是单梁的情况下功率输出会增加。
[0178]
如本文所描述的,本发明在其水平构造中可以包括单
‑
双晶片梁装置(参见图4a、图4b、图14、图21)或双梁设计(图22至图24)。由于增加了压电元件,所以双梁设计提供增加的电输出。应该理解,在一些实施方式中,可以使用任何数量的压电梁。
[0179]
在一些实施方式中,如图24中所示的止动构件70可以用于提供机械止动件,以防止中间梁46的进一步机械挠曲。为此,止动构件70可以包括具有足以防止中间梁46的过度挠曲的尺寸的块构件,中间梁46的过度挠曲可能导致其损坏。
[0180]
结论
[0181]
在本文中,研究了从均匀压电梁和分段压电梁产生电力。计算了梁的振型,并且针对竖直构造和引入的水平构造对电机械方程进行了求解。收集器上的载荷引起压电梁的屈曲。这种转变引起压电梁的振荡,并且致使电力生成。在力被移除(人进行另一步或者车辆已经经过)之后,梁弹回至非屈曲形状,并且产生更多电力。为了防止梁断裂或损坏,放置机械止动件来限制梁的变形。竖直设计可以在道路上实施,利用经过的车辆的重量来产生电力。通过使用分段梁而不是均匀梁,间隙距离增加,这使得该设计在制造方面更加实用。装置的其他构造(水平)使其易于在跑步机、购物中心地板或舞场中实施,并且还使得可以使用人体的重量作为向装置施加力并且产生电力的来源。这种新构造的间隙距离也较大。结果表明,与使用均匀梁的竖直构造相比较,该距离增加了大约500倍。针对不同西塔(theta)角和不同横梁讨论了间隙距离,并且表明西塔(theta)角是设计水平装置中的关键参数。针对两种情况(在止动件接合之前和接合之后)推导了系统的控制方程。对梁的瞬时振动已进行了解析建模。已经考虑了梁的几何非线性。针对两个案例研究,计算和研究了装置的挠度和输出功率。结果表明,针对每个设计均存在产生最大平均功率输出的最优电阻。最后,研究了压电层的长度和厚度对输出功率以及间隙距离的影响。
[0182]
出于说明和描述的目的,已经提供了对实施方式的前述描述。并非意在穷举或限制本公开内容。虽然未具体示出或描述,但是特定实施方式的单个元件或特征通常不限于该特定实施方式,而是在适用的情况下可互换,并且可以用在选择的实施方式中。也可以以许多方式对特定实施方式的单个元件或特征进行改变。这样的变化不被认为是背离本公开
内容,并且所有这样的修改意在被包括在本公开内容的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1