模块化构造系统马达单元的制作方法
1.本发明涉及模块化构造系统和模块化构造系统马达单元。
背景技术:
2.这样的模块化构造系统在本领域中是已知的,模块化构造系统马达单元或简单马达单元也是已知的。模块化构造系统包括多个构造元件,例如构建砌块或砖块,当它们连接在一起时,可以组装形成各种不同的构建结构。马达单元可以被添加到这种模块化构造系统中,以便使这种系统的部件移动。
3.模块化构造系统是“模块化”的,在这种意义上,构成构造系统的构造元件的尺寸和形状被确定,并且包括允许它们相互连接的协作连接器件,使得模型/套件(例如人形机器人等)可以被构造。
4.学习系统、机器人构造套件和所谓的制造者工具包是已知的,其可以向用户提供各种功能。
5.从传统的模块化构造系统中已知的模块化构造元件(例如梁、板、砖块、栓、连接器、齿轮等)可以与功能性模块化构造元件(例如照明元件、马达/致动器、传感器)组合,但也可以与可编程处理器单元组合,可编程处理器单元也可以与外部设备数字连接,例如用于编程或远程控制。这种具有增强功能的模块化构造系统已经证明了它们在游戏和/或学习环境中的价值,尤其是因为它们有助于简单和功能性模块化构造元件之间的可靠且容易拆卸的机械连接,并且因为功能性模块化构造元件彼此适配以提供积极和刺激的用户体验。
6.用于这种模块化构造系统的马达单元通常包括动力输出盘,该动力输出盘包括适于连接例如轴等的连接器件。
7.在许多模块化构造组件的应用中,其中应用了功能性构造元件,诸如马达单元,希望能够精确地控制所构造的组件的运动。为此,模块化构造系统的马达单元可以包括编码器,例如具有360度分辨率的磁传感器,具有0点指示器的调节绝对位置马达。
8.在模块化构造系统中,为了保持低成本,马达单元通常包括壳体和其他部件,例如齿轮机构,包括由塑料形成的部件,并且它们因此可以容易地连接到也由塑料形成的其他构造元件。模块化构造系统的马达单元通常很小,但仍可用于构造很大的结构。因此,在使用过程中,可能会向马达单元的输出盘施加大的、有时不对称的负载。
9.当这种不对称负载施加到马达单元上时,这就变成了一个问题。有时,输出元件上的不对称负载给编码器提供不对称,从而导致编码器提供输出元件相对于马达单元壳体的旋转位置的不正确测量,并由此危及旋转的精确控制。
10.因此,当不对称负载施加到马达单元的动力输出元件时,需要一种模块化构造系统马达单元,其还具有可靠、精确的旋转感测机构。
技术实现要素:
11.因此,本发明的目的是缓解现有技术的问题
12.这是通过用于模块化构造系统的模块化构造系统马达单元来实现的,包括:
[0013]-壳体;
[0014]-安装在壳体中的电马达;
[0015]-动力输出元件,具有用于连接到构造元件的至少一个连接器,并且相对于所述壳体围绕旋转轴线可旋转地连接;
[0016]-设置在电马达和动力输出元件之间的齿轮机构;和
[0017]-旋转感测机构,被配置为感测动力输出元件相对于壳体的旋转位置,
[0018]
其中,旋转传感机构包括与动力输出元件一起旋转的盘元件和相对于壳体固定的传感器装置,其中盘元件经由固定地连接到盘元件的第一旋转传递部件和用于接收第一旋转传递部件的容纳部连接到动力输出元件或齿轮机构的齿轮,该容纳部形成在动力输出元件或齿轮机构的所述齿轮中,
[0019]
并且其中,容纳部和第一旋转传递部件具有配合形状和尺寸,配合形状和尺寸被构造成在第一旋转传递部件接合输出元件以与其一起旋转之前允许动力输出元件轻微旋转。
[0020]
在一个实施例中,容纳部和第一旋转传递部件的配合形状和尺寸被构造成使得在第一旋转传递部件接合输出元件以与其一起旋转之前,容纳部被允许旋转0.5
°
。
[0021]
在一个实施例中,盘元件经由第一轴连接到动力输出元件。
[0022]
在一个实施例中,盘元件相对于壳体布置在壳体的与动力输出元件相对的侧壁处。
[0023]
在一个实施例中,齿轮机构的一些齿轮被同轴地布置成围绕并支撑第一轴。
[0024]
在一个实施例中,第一旋转传递部件包括圆柱形主体部分和从其突出的第一臂,并且其中容纳部包括圆柱形主槽和从其延伸的第一臂槽。
[0025]
第一旋转传递部件的第一臂优选垂直于第一旋转传递部件的圆柱形外表面延伸。对应地,容纳部的第一槽臂优选垂直于容纳部的圆柱形内表面延伸。
[0026]
应当理解,在优选实施例中,第一旋转传递部件的第一臂垂直于输出元件的旋转轴线延伸。对应地,容纳部的第一槽臂优选垂直于输出元件的旋转轴线延伸。
[0027]
在一个实施例中,第一旋转传递部件的第一臂具有第一宽度,并且容纳部的第一槽臂具有第二宽度,其中第一宽度比第二宽度小1-2mm。
[0028]
在第二方面,本发明的目的通过一种模块化构造系统来实现,其包括根据本发明第一方面的任一实施例的模块化构造系统马达单元和多个构造元件。
[0029]
应强调,在本说明书中使用术语“包括/包含”时,指定了所述特征、整数、步骤或部件的存在,但不排除一个或多个其他特征、整数、步骤、部件或其组合的存在或添加。
附图说明
[0030]
下面,将参照附图所示的实施例更详细地描述本发明。应当强调的是,所示的实施例仅用于示例目的,不应用于限制本发明的范围。在附图中:
[0031]
图1a以透视图显示了根据本发明一个方面的模块化构造系统马达单元和根据本
发明另一个方面的模块化构造系统;
[0032]
图1b在侧视图中示出了图1a的马达单元;图1c在俯视图中示出了图1a的马达单元;
[0033]
图2是图1a-c所示的马达单元的横截面侧视图;图3是马达单元的横截面端视图,如图1a-c所示;
[0034]
图4是分解图,示出了图1a-c、2和3中所示的马达单元的主要子单元;
[0035]
图5是分解图,示出了图1a-c、2、3和4中所示的马达单元的驱动子单元;
[0036]
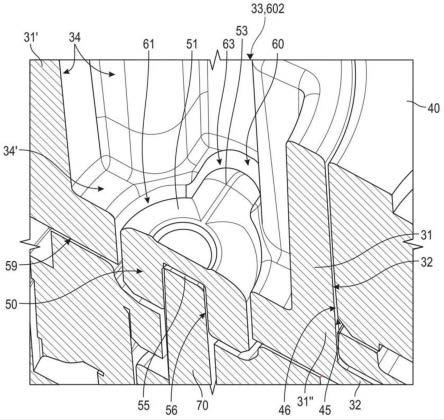
图6是截面透视图,示出了图1a-c、2、3和4中所示的马达单元的动力输出元件的细节;
[0037]
图7a是俯视图,示出了图6的动力输出元件的内部动力输出元件,以及其与第一旋转传递部件的连接;
[0038]
图7b是俯视图,示出了图7a的第一旋转传递部件;
[0039]
图7c是俯视图,示出了当没有连接到图7b的第一旋转传递部件时,图7a的内部动力输出元件;
[0040]
图8以透视图示出了根据本发明的一个方面的模块化构造系统,并且包括模块化构造系统马达单元、一组连接器元件和现有技术的构造元件(属于第一类型的构造元件),并且使用该组连接器元件将马达单元安装到第一构造元件上;
[0041]
图9是透视透视图,示出了属于第二类型的构造元件的现有技术构造元件,该构造元件具有形成在一个表面上的连接器旋钮和在相对表面上的连接器旋钮接收开口;
[0042]
图10以透视图的形式示出了用于模块化构造系统的现有技术的连接器元件,该连接器元件包括第二类型的构造元件,该第二类型的构造元件包括连接器开口,该连接器元件具有两个相对的端部,每个端部包括卡扣连接,该卡扣连接被配置为连接到第二类型的构造元件的连接器开口;和
[0043]
图11是透视图,示出了插入构造系统的一个构造元件的连接器开口中的如图9所示的两个连接器元件,以及具有另外的连接器开口的构造系统的另一构造元件。
具体实施方式
[0044]
图1a以透视图显示了根据本发明一个方面的模块化构造系统马达单元1和根据本发明另一个方面的模块化构造系统。模块化构造系统马达单元1可以简单地称为马达单元1。图1b示出了图1a的马达单元1的侧视图,图1c示出了图1a的马达单元1的俯视图。
[0045]
马达单元1包括壳体10和安装在壳体10内部的电马达150。电马达150未在图1a中示出,但在图2和5中可见。
[0046]
马达单元1还包括动力输出元件20,或简称为输出元件20,其从壳体10延伸,并且以输出元件20可以相对于壳体10旋转的方式连接到壳体10。
[0047]
输出元件20相对于壳体10围绕旋转轴线(未示出)旋转连接
[0048]
输出元件20连接到电马达150,使得当电马达150的输出轴151旋转时,参见图2和5,输出元件20也被迫旋转。输出元件20优选经由齿轮机构200连接到电马达150,例如如图3、4、5、6和7a-c所示。
[0049]
输出元件20设置有至少一个连接器600,用于将马达单元1连接到模块化构造系统
的构造元件510、520。
[0050]
在图1中,输出元件20包括五个这样的连接器600。
[0051]
在输出元件20的中心,示出了一个连接器600,即第一连接器601。第一连接器601采取进入输出元件20中的凹部的形式,其具有x形(十字形)横截面(垂直于输出元件20的旋转轴线截取的横截面)。如图8所示,第一连接器被配置用于接收轴524,轴524具有对应于第一连接器601的横截面形状的横截面形状(垂直于轴524的纵向轴线截取),即轴具有x形(十字形)横截面。如上所述,属于模块化构造系统500的第一连接器601和轴524的尺寸被设计成使得第一连接器601和轴可以在它们之间形成摩擦配合。
[0052]
沿着输出元件20的外围,示出了四个相同的连接器600、第二连接器602。第二连接器形成为进入并穿过输出元件20的凹部。第二连接器优选为连接器开口640,这将在下面结合图8、10和11进行描述。
[0053]
应当理解,在其他未示出的实施例中,输出元件20可以仅具有位于中心的连接器600,例如第一连接器,并且在外围没有连接器。
[0054]
还应当理解,在其他未示出的实施例中,输出元件20可以仅在外围具有连接器,例如上述第二连接器602,而没有中心的第一连接器601。
[0055]
还应当理解,在其他未示出的实施例中,连接器600的数量、形式和位置(在输出元件20上)可以不同于图1a所示。优选地,一个或多个连接器600被配置为与模块化构造系统的各种类型的构造元件协作并连接,例如如下所述。
[0056]
马达单元1的壳体10还具有形成在其中的多个连接器开口640,这将在下面结合图8、10和11进行描述,以便允许马达单元1连接到模块化构造系统500的其他构造元件。再次应当理解,其他类型的连接器件可以形成在壳体10上。
[0057]
如上所述,根据本发明的马达单元1可以形成包括多个构造元件的模块化构造系统500的一部分。在下文中,在返回到马达单元1之前,将更详细地描述这种模块化构造系统500和示例性构造元件。
[0058]
图9在透视透视图中示出了属于第一类型构造元件510的现有技术构造元件511。这种第一类型的构造元件510至少包括连接器旋钮610,该连接器旋钮610被配置为连接到具有旋钮接收开口620的类似的但不同形状的第一类型510的其他构造元件。图9所示的结构元件501具有形成在其上表面上的连接器旋钮610和形成在其相对表面上的旋钮接收开口620。应当理解,例如,如图10所示的两个构造元件501可以通过将一个构造元件501的连接器旋钮610连接到第二构造元件501的对应数量的连接器开口620而彼此连接。连接器旋钮610和旋钮接收开口620通过圆柱形连接器旋钮610的外直径与旋钮接收开口620的一个或多个表面的尺寸紧密适配而形成摩擦配合/摩擦连接。
[0059]
图9所示的构造元件502具有八个连接器旋钮610和八个旋钮接收开口620。连接器旋钮610布置成规则的二维网格,在这种情况下为2
×
4网格。类似地,旋钮接收开口620布置成规则的二维网格,在这种情况下为2
×
4网格。图9中所示的构造元件502被成形为砖块。
[0060]
第一类型的构造元件510的另一构造元件512如图8所示。图8中示出的构造元件512形成为板,并且包括形成为6
×
6网格的36个连接器旋钮610,以及36个旋钮接收开口旋钮620(未示出),也布置为6
×
6网格,相对于连接器旋钮610在板的相对侧。
[0061]
第一类型构造元件510的构造元件在此被定义为具有连接器旋钮610或旋钮接收
开口620,或两者。第一类型构造系统在此被定义为包括两个或更多个第一类型构造元件510的构造元件系统,其中至少一个构造元件具有以规则二维nxn网格布置的连接器旋钮610,其中n》2。第一类型的构造系统是本领域已知的,例如由lego a/s销售的商品名为“lego system”的系统。
[0062]
图10示出了具有两个圆柱形连接器部分630的第二类型构造元件521,这两个圆柱形连接器部分630沿着公共轴线形成并且彼此背离。第二类型构造元件520可以附加地或替代地包括圆柱形连接器开口640,其被配置为与具有突出的圆柱形连接器部分630的其他第二类型构造元件520协作,例如图10所示的第二类型构造元件521。
[0063]
图11示出了第二类型构造系统520的示例,其包括具有各种形状和形式以及各种连接方式的第二类型构造元件521、522、523、524、525。
[0064]
图10中所示的第二类型构造元件510、511包括两个圆柱形连接器部分630或弹性连接器栓,每个被构造成与形成在另一第二类型构造元件520上的连接器开口640形成卡扣连接。
[0065]
图11示出了另外两个第二类型构造元件520、522、523。
[0066]
图中右侧所示的第二类型构造元件522被成形为梁,该梁具有穿过其形成的三个圆柱形连接器开口640。在这些圆柱形连接器开口640中的两个中,如图10所示的第二类型构造元件521的一端已经被插入,并且已经以卡扣连接的方式可释放地锁定在其中。
[0067]
图中左侧所示的第二类型构造元件523被成形为由形成在公共平面中的四个梁形成的矩形框架。这些梁中的两个具有三个连接器开口640,形成有平行于框架平面的纵向轴线。应当理解,这些连接器开口640中的每一个都可以接收第二类型构造元件521的圆柱形连接器部分630,如图10所示。然而,还应当理解,连接器开口也可以形成用于例如轴524的轴承,如图所示。如图11所示,轴524具有十字形截面形状。
[0068]
图11中的垂直于上述两个梁形成的框架形第二类型构造元件523的两个梁,每个具有在框架平面中穿透形成的三个圆柱形连接器开口640和穿过梁形成的四个圆柱形连接器开口640,开口的纵向轴线垂直于框架平面。再次,将理解,这些连接器开口640中的每一个可以接收第二类型构造元件521的圆柱形连接器部分630,如图10所示。
[0069]
图10所示的包括两个相对的圆柱形连接器部分630的第二类型构造元件521可用于可释放地连接两个其他第二类型构造元件,例如图11所示的第二类型构造元件522、523。在未示出的变型中,第二类型构造元件可以包括一个或多个圆柱形连接器开口640和一个或多个圆柱形连接器部分630。
[0070]
圆柱形连接器部分630和圆柱形连接器开口640之间的卡扣连接由圆柱形连接器部分630和圆柱形连接器部分630的弹性提供,圆柱形连接器部分630设置有布置在圆柱形连接器部分630的自由端的周向布置的卷边631。这种弹性可以由在圆柱形连接器部分630的纵向方向上形成的一个或多个狭缝632提供。在图10的变型中,示出了两个这样的狭缝632。卷边631的直径略大于圆柱形连接器部分630的主体的直径。
[0071]
圆柱形连接器部分630的长度对应于圆柱形连接器开口640的长度。圆柱形连接器部分630的直径对应于圆柱形连接器开口640的尺寸。
[0072]
圆柱形连接器开口640的每一端设置有直径扩大的环形开口(未示出),其被构造成与形成在圆柱形连接器部分630上的卷边631配合。
[0073]
当圆柱形连接器部分630被使用者按压穿过圆柱形连接器开口640时,圆柱形连接器部分630的弹性允许卷边631被按压穿过圆柱形连接器开口640的主要部分,并且当卷边到达圆柱形连接器开口640的相对端处的直径扩大的环形开口时,圆柱形连接器部分630的主体的弹性允许卷边631与直径扩大的环形开口接合,从而在圆柱形连接器部分630和圆柱形连接器开口640之间形成卡扣连接。
[0074]
这种卡扣连接在本领域中是已知的
[0075]
第二类型构造元件520的构造元件在此被定义为具有至少圆柱形连接器开口640,其被配置为如上所述与圆柱形连接器部分630(弹性连接器栓270)进行卡扣连接。第二类型构造元件200也可以包括具有一个或多个圆柱形连接器部分630的构造元件。第二类型构造元件520也可以包括具有一个或多个圆柱形连接器部分630和一个或多个圆柱形连接器开口640的构造元件。
[0076]
第二类型构造系统在此被定义为包括两个或更多个第二类型构造元件520的构造元件系统,其中至少一个构造元件具有至少一个连接器开口640。第二类型的构造系统2000的一个例子是本领域已知的,例如由lego a/s销售的商品名为“lego system”的系统。
[0077]
应当理解,一些第二类型构造元件520和第二类型构造系统的一些构造元件还可以具有连接器旋钮610和/或旋钮接收开口620,从而形成混合结构。
[0078]
图8的右手侧示出了根据本发明实施例的马达单元1,其安装在第一类型构造元件510的板状构造元件512上。为此,模块化构造系统还包括连接器元件550。
[0079]
连接器元件530在图8左手侧的透视图中示出。连接器元件530被配置成用于连接属于第一类型构造元件510的构造元件和属于如上定义的第二类型构造元件520的构造元件。一个或多个连接器元件530可以进一步形成构造系统500的一部分,构造系统500包括马达单元1,并且还包括一个或多个第一类型构造元件510和/或一个或多个第二类型构造元件520。连接器元件530在一端包括圆柱形连接器部分630,允许如上所述连接到圆柱形连接器开口640。在另一端,连接器元件530包括旋钮接收开口620,允许连接器元件530连接到旋钮610。旋钮接收开口620设置在连接器元件530的圆柱形部分上,连接器元件530的尺寸和形状被配置为连接在第一类型构造元件510的四个连接器旋钮610之间,例如图8所示的板形第一类型构造元件512。
[0080]
电马达单元1具有圆柱形连接器开口640,因此可以连接到具有圆柱形连接器部分630的第二类型构造元件520,或者连接到连接器元件530,如图8所示。
[0081]
在图8中,电马达单元1经由四个连接器元件530连接到板512,每个连接器元件具有插入电马达单元1上的圆柱形连接器开口640中的圆柱形连接器部分630,并且其相对布置的圆柱形部分连接在板104上的四个相邻连接器旋钮150之间。
[0082]
现在,回到马达单元1本身,如上所述,马达单元1的壳体10(如图1a-c所示)包括多个连接器开口640形式的连接器件。然而,在未示出的实施例中,壳体可以替代地或附加地设置有其他类型的连接器件,例如上述连接器旋钮610、旋钮接收开口620和/或圆柱形连接器部分630,或者在其他实施例中,适合于其他类型的模块化构造系统的连接器器件。
[0083]
如上所述,如图2和3所示,动力输出元件20经由设置在电马达150和动力输出元件20之间的齿轮机构200连接到电马达150。下面将进一步详细描述示例性齿轮机构。
[0084]
然而,也如图2和3所示,马达单元1还包括旋转感测机构。旋转感测机构被配置为
感测动力输出元件20相对于壳体10的旋转位置,为此,旋转感测机构包括盘元件99,例如永磁体。盘元件99连接到动力输出元件20或齿轮机构的齿轮,使得盘元件99和动力输出元件20一起旋转,或至少成比例地旋转。盘元件99和动力输出元件20之间的示例性连接将在下面进一步详细描述。然而,从图2和3可以理解,盘元件99通过第一轴70连接到动力输出元件20。
[0085]
旋转感测机构还包括相对于壳体固定的传感器装置399。
[0086]
如图2和3所示,传感器装置399固定到印刷电路板(pcb)310上,形成控制子单元300的一部分,控制子单元300构成马达单元1的控制机构。印刷电路板(pcb)310相对于壳体10固定,由此传感器装置399相对于壳体10固定。
[0087]
传感器装置399是编码器/旋转传感器,例如能够光学记录盘元件99的旋转的光学传感器,或者当盘元件99是磁体时的磁场传感器,或者具有磁性特性的元件。
[0088]
在图2、3、5、6和7所示的实施例中,盘元件99通过第一旋转传递部件50连接到动力输出元件20,第一旋转传递部件50固定地连接到盘元件99和用于接收第一旋转传递部件50的容纳部60,该容纳部60形成在动力输出元件20中。
[0089]
然而,替代地,盘元件99可以通过类似于图中所示的第一旋转传递部件50连接到齿轮机构200的齿轮。这在图中没有显示。然而,同样在这种情况下,第一旋转传递部件50将固定地连接到盘元件99。第一旋转传递部件50将通过用于接收第一旋转传递部件50的容纳部60连接到齿轮机构200的所述齿轮,例如图2、3和5中所示的最下面的齿轮220,然后容纳部60将形成在齿轮机构200的齿轮中。
[0090]
在任一种情况下,容纳部60和第一旋转传递部件50具有配合形状和尺寸,配合形状和尺寸被构造成在第一旋转传递部件50与输出元件20接合以与其一起旋转之前允许输出元件20轻微旋转。
[0091]
如上所述,在优选实施例中,如图所示,容纳部60可以设置在动力输出元件20中,这将在下面进一步详细描述。然而,应当理解,下面描述的容纳部60和第一旋转传递部件50之间的协作也可以应用于容纳部60形成在齿轮中的实施例。
[0092]
如图4所示,马达单元1的壳体10可以包括三个部分:顶部11、底部12和端部13。壳体10的部分保护内部部件(电马达150、齿轮机构200、控制子单元300等)免受损坏,并通过形成用于安装内部部件的支撑件来确保它们的相互关系/布置。
[0093]
三个部分11、12、13允许内部部件的组装,并且可以通过卡扣连接、螺钉或本领域已知的任何其他方式彼此连接。在一些实施例中,壳体10可以被拆卸以允许马达单元1的维护,例如部件的更换。在其他实施例中,部件可以被连接,从而至少防止未授权的拆卸。
[0094]
壳体10包括开口15,这里显示在顶部11中,该开口15形成动力输出元件20的一部分的支承件。壳体中的开口15具有第一直径。
[0095]
在一些实施例中,如图所示,动力输出元件20由两部分形成,内部动力输出元件30和外部动力输出元件40。上述第一连接器600、601形成在内部动力输出元件30中,第二连接器600、602形成在外部动力输出元件40中。内部动力输出元件30和外部动力输出元件40通过形成在外部动力输出元件40的面向内的表面/内表面46中的细长突起47以防止旋转的方式(相对于彼此)彼此连接,该细长突起47与形成为内部动力输出元件30的顶部31的外表面32中的凹部的凹口32’配合。
[0096]
参见例如图5,内部动力输出元件30包括顶部31和底部35。顶部31是圆柱形的,并且具有第二直径。顶部被配置成延伸穿过壳体10中的开口15。顶部31的直径,即第二直径被配置成允许内部动力输出元件30相对于壳体10旋转。底部35也是圆柱形的,并且具有第三直径,该第三直径大于顶部31的直径,使得当内部动力输出元件30插入壳体10的开口15中时,底部35的面向上的表面可以与壳体10的面向内的表面相互作用,围绕开口15,防止内部动力输出元件30在一个轴向方向上的轴向运动。如图4的分解图所示,相对于内部动力输出元件30的底部35,外部动力输出元件40在壳体10的相对侧连接到内部动力输出元件30的顶部31。内部动力输出元件30的底部35布置在壳体10的内侧,而内部动力输出元件30的顶部31穿过开口15延伸穿过壳体10,并且外部动力输出元件40在壳体10外侧连接到内部动力输出元件30的顶部31。因此,防止了内部动力输出元件30在另一轴向方向上的轴向运动。
[0097]
参见图3和4,外部动力输出元件40包括主体41,主体41具有上表面42和下表面43以及外表面44。开口45布置成从上表面42到下表面43穿过外部动力输出元件40的主体41,开口45构造成用于接收内部动力输出元件30的顶部31的一部分。穿过外部动力输出元件40的主体41的开口45包括面向内的表面,即内表面46。突起47形成在外部动力输出元件40的内表面46上并从该内表面向内延伸。
[0098]
参见图4,内部动力输出元件30的顶部31包括外端31’和内端31’,并且具有外表面32。
[0099]
内部动力输出元件30的底部35包括外端和内端以及外表面35。底部35的外端连接到内部动力输出元件30的顶部31的内端31”,例如参见图4。优选地,内部动力输出元件30的顶部31和底部35作为一个整体部件形成为一个件。
[0100]
同样如上所述,细长凹口32’形成为内部动力输出元件30的顶部的外表面32的轴向方向上的细长凹部,并且被构造成与形成在穿过外部动力输出元件40的开口45的内表面46上并从该内表面46向内延伸突起47配合。
[0101]
内部空间33设置在内部动力输出元件30的顶部31中。内部空间33具有在顶部31的内端31”形成的底,并且在顶部的外端31’开口。因此,内部空间33可以被认为是杯形的。
[0102]
参见图3,内部动力输出元件30的顶部31具有面向内的表面,即内表面34,其限定了内部空间33。
[0103]
内部动力输出元件30的顶部31的内部空间33可以构成上述第二连接器602。因此,横截面(垂直于内部动力输出元件30的顶部31的轴向方向截取)可以如所描述的那样为十字形/x形,以便接收类似的十字形/x形轴,例如图11所示的轴524。内部空间33的横截面形状也可以从图6中看出,图6示出了穿过动力输出元件20、形成在其中的容纳部60、第一旋转传递部件50和第一轴70的截面。动力输出元件20显示为具有内部动力输出元件30和外部动力输出元件40。图6还示出了内部动力输出元件30的顶部31的内部空间33在顶部31的内端32”处具有底表面34’,这也可以在图7c中理解。
[0104]
内部空间37设置在内部动力输出元件30的圆柱形底部35中。该内部空间37也具有形成的底壁或端壁,但是形成在底部35的外端,并且在底部顶部的内端开口。因此,内部空间37可以被认为是杯形的。与顶部31的内部空间33相反,该内部空间37向下开口并开口到壳体10的内部。
[0105]
参见图3,内部动力输出元件30的底部35具有面向内的表面,即内表面38,其限定
了内部空间37。
[0106]
内部动力输出元件30的底部35的内表面38具有允许与齿轮机构200的输出盘280的上部283的外表面284配合/连接的横截面形状(垂直于内部动力输出元件30的圆柱形底部35的轴向方向截取),该外表面284具有与内部动力输出元件30的底部35的内表面38的横截面形状互补的横截面形状,参见图2和3.
[0107]
内部动力输出元件30以这种方式由齿轮机构200的输出盘280驱动。
[0108]
参考图2、3和5,电马达150和动力输出元件20之间的连接不再进一步详细讨论。
[0109]
如上所述,电马达150具有马达输出轴151,参见图2和5。马达输出轴151连接到固定在马达输出轴151上的第一齿轮210。
[0110]
第一齿轮210具有设置有齿轮齿212的外表面211,并且构造成与第二齿轮230配合。
[0111]
第二齿轮220由第一轴70旋转地支撑,但是可以相对于第一轴70自由旋转。为此,第二齿轮220包括贯通开口225(沿轴向方向)。
[0112]
第二齿轮220还包括大直径部分221和小直径部分223。大直径部分221包括齿轮齿222,齿轮齿222构造成与第一齿轮210的齿轮齿212配合。
[0113]
如图2和5所示,电马达150的输出轴151垂直于第二齿轮220的旋转轴线设置。为此,第二齿轮220的大直径部分221上的齿轮齿222设置在大直径部分221的面向上的表面上。这种布置允许非常紧凑的马达单元,因为齿轮机构200的旋转轴线垂直于电马达150的输出轴151,这允许齿轮机构紧凑地位于电马达150的端部。
[0114]
然而,应当理解,在其他实施例(未示出)中,齿轮机构200的轴线和来自电马达150的输出轴151的轴线可以平行布置。应当理解,在该实施例中,第二齿轮220的大直径部分221上的齿轮齿222可以替代地设置在大直径部分221的面向外的表面上(未示出)。
[0115]
第二齿轮220的大直径部分221和小直径部分223优选形成为单一整体结构。
[0116]
第二齿轮220的小直径部分223包括形成在其外表面上的齿轮齿224,并且被配置为与齿轮机构200的第三齿轮230协作。
[0117]
第三齿轮230由第二轴80旋转支撑,但是可以相对于第二轴80自由旋转。为此,第三齿轮230包括贯通开口235(沿轴向方向)。
[0118]
第二轴80平行于第一轴70布置。
[0119]
第三齿轮230还包括大直径部分231和小直径部分233。大直径部分231包括形成在其上的齿轮齿232,并且配置成与形成在第二齿轮220的小直径部分222上的齿轮齿224配合。
[0120]
第三齿轮230的大直径部分231和小直径部分233优选形成为单一整体结构。
[0121]
第三齿轮230的小直径部分233包括形成在其外表面上的齿轮齿234,并且构造成与齿轮机构200的第四齿轮240配合。
[0122]
第二齿轮220的小直径部分222包括形成在其外表面上的齿轮齿224,并且被配置为与齿轮机构200的第三齿轮230协作。
[0123]
第三齿轮230由第二轴80旋转支撑,但是可以相对于第二轴80自由旋转。为此,第三齿轮230包括贯通开口235(沿轴向方向)。
[0124]
第二轴80平行于第一轴70布置。
[0125]
第三齿轮230还包括大直径部分231和小直径部分233。大直径部分231包括形成在其上的齿轮齿232,并且配置成与形成在第二齿轮220的小直径部分222上的齿轮齿224配合。
[0126]
第三齿轮230的大直径部分231和小直径部分233优选形成为单一整体结构。
[0127]
第三齿轮230的小直径部分231包括形成在其外表面上的齿轮齿232,并且构造成与齿轮机构200的第四齿轮240配合。
[0128]
第四齿轮240由第一轴70旋转支撑,但是可以相对于第一轴70自由旋转。为此,第四齿轮240包括贯通开口245(沿轴向方向)。
[0129]
第四齿轮240还包括大直径部分241和小直径部分243。大直径部分241包括形成在其外表面上的齿轮齿242,并且构造成与形成在第三齿轮230的小直径部分233上的齿轮齿234配合。
[0130]
第四齿轮240的大直径部分241和小直径部分243优选形成为单一整体结构。
[0131]
第四齿轮240的小直径部分243包括形成在其外表面上的齿轮齿244,并且构造成与齿轮机构200的第五齿轮250配合。
[0132]
第五齿轮250由第二轴80旋转支撑,但是可以相对于第二轴80自由旋转。为此,第五齿轮250包括贯通开口255(沿轴向方向)。
[0133]
第五齿轮250还包括大直径部分251和小直径部分253。大直径部分251包括形成在其外表面上的齿轮齿252,并且构造成与形成在第四齿轮240的小直径部分243上的齿轮齿244配合。
[0134]
第五齿轮250的大直径部分251和小直径部分253优选形成为单一整体结构。
[0135]
第五齿轮250的小直径部分253包括形成在其外表面上的齿轮齿254,并且构造成与齿轮机构200的第六齿轮260配合。
[0136]
第六齿轮260由第一轴70旋转支撑,但是可以相对于第一轴70自由旋转。为此,第六齿轮260包括贯通开口265(沿轴向方向)。
[0137]
第六齿轮260还包括下部261和上部263。下部261包括形成在其外表面上的齿轮齿262,并且构造成与形成在第五齿轮250的小直径部分253上的齿轮齿254配合。
[0138]
第六齿轮260的下部261和上部263优选形成为单一整体结构。
[0139]
第六齿轮250的上部263是圆柱形的,并且包括外表面264,该外表面264被配置成用于通过壳体10的一部分与第一开口115的面向内的表面116相互作用,壳体10的该部分呈外壳驱动子单元外壳部分110的形式(见下文)。第一开口115形成第六齿轮260的轴承或支撑件,并允许第六齿轮260相对于壳体10旋转。
[0140]
参见图3,第六齿轮260的贯通开口265还具有面向内的表面266,该面向内的表面266具有成型截面形状(垂直于第六齿轮260的轴向方向),该成型截面形状被构造成与前面提到的输出盘280的下部281的类似成型外表面282配合。见图3,面向内表面266的成型截面形状和输出盘280的下部281的成型外表面282是互补的,使得当输出盘280的下部281插入第六齿轮260的通孔265时,输出盘280和第六齿轮260互锁,从而一起旋转。
[0141]
优选地,面向内的成型截面形状表面266和输出盘280的下部281的成型外表面282是互补的,使得输出盘的下部281至少与输出盘280的贯通开口265的上部部分形成摩擦配合。
[0142]
因此,输出盘280包括下部281和上部283。如上所述,下部281包括外表面,该外表面被成型。输出盘280的上部283也包括外表面284。输出盘280的上部283的外表面284的整体直径大于输出盘280的下部281的整体外直径。输出盘280的上部283的外表面优选地也被成型,并且被配置成与内部动力输出元件30的底部35的内部空间37的面向内的表面即内表面38配合。
[0143]
同样如上所述,内部动力输出元件30的底部35的内表面38具有与齿轮机构200的输出盘280的上部283的外表面284互补的截面形状(垂直于内部动力输出元件30的圆柱形底部35的轴向方向截取),使得输出盘280和内部动力输出元件30将一起旋转。
[0144]
还应注意,齿轮机构200的输出盘280具有贯通开口285(沿其轴向方向)。输出盘280的贯通开口285被构造成用于接收第一轴70,使得第一轴和输出盘280被允许相对于彼此旋转。
[0145]
从齿轮机构的上述描述中,很明显,由具有输出轴151的电马达150在第一齿轮210被夹在其上的情况下引起的旋转将导致可相对于第一轴70和壳体10旋转的第二齿轮220的旋转。第二齿轮220的旋转将导致可相对于第二轴80和壳体10旋转的第三齿轮230的旋转。第三齿轮230的旋转将导致可相对于第一轴70和壳体10旋转的第四齿轮240的旋转。第四齿轮240的旋转将导致可相对于第二轴80和壳体10旋转的第五齿轮250的旋转。第五齿轮250的旋转将导致可相对于第一轴70和壳体10旋转的第六齿轮260的旋转。第六齿轮260的旋转将导致可相对于第一轴70和壳体10旋转的输出盘280的旋转。输出盘280的旋转将导致内部动力输出元件30和与其连接的外部动力输出元件40的旋转。因此,由电马达150引起的旋转将导致动力输出元件20旋转。很清楚,经由第一连接器601或第二连接器602附接到动力输出元件20的构造元件510、520将由此被旋转。
[0146]
在上面,直径、齿轮齿的数目、传动比等没有被描述。然而,对于本领域技术人员来说,显然可以通过齿轮210、220、230、240、250、260的合适尺寸来选择合适的齿轮比。
[0147]
在上文中,没有详细描述包括壳体10的内部结构在内的壳体10的部件如何为齿轮210、220、230、240、250、260、第一轴70和第二轴80以及可能的其它所述部件或其零件提供轴承和其它支撑。
[0148]
替代地,可以使用其他类型的齿轮机构,例如具有不同数量的齿轮和/或其他传动比的齿轮机构等。
[0149]
因此,上面已经描述了如何将动力(旋转)从电马达150传递到动力输出元件20。
[0150]
现在转到图7和7a-c,将描述旋转如何从动力输出元件20传递到盘元件99,使得动力输出元件20上的不对称负载不会传递到盘元件99。
[0151]
如图7b所示,第一旋转传递部件50包括主体51,主体51基本上是圆柱形的。第一旋转传递部件51的主体51具有外表面52。第一臂53和第二臂54从第一旋转传递部件50的圆柱形本体51延伸。第一旋转传递部件的第一臂53和第二臂54彼此径向相对,并且从第一旋转传递部件50的圆柱形本体51的外表面52延伸。在其他实施例中,仅提供单个臂(未示出)。
[0152]
图7b还示出了第一旋转传递部件50的第一和第二臂53、54具有宽度,即第一宽度w1。
[0153]
图6示出了穿过动力输出元件20(包括内部动力输出元件30和外部动力输出元件40)、形成在其中的容纳部60、第一旋转传递部件50和第一轴70的截面。
[0154]
图6还示出了第一旋转传递部件50包括设置在第一旋转传递部件50的主体51中的内部空间55。内部空间55具有面向内的表面,即内表面56,其被构造成与第一轴70的第一端71配合。第一旋转传递部件50可以被夹在第一轴70的第一端71上,使得第一旋转传递部件50的旋转将被传递到轴70。
[0155]
第一轴70是细长的,并且包括第一端71和与其相对的第二端72。如图2和3所示,第一轴70从其与第一旋转传递部件50的连接处延伸,穿过齿轮机构的一些齿轮260、240、220,朝向pcb 310,传感器装置399设置在壳体10的内表面附近,与第一旋转传递部件50相对,并与动力输出元件20相对。
[0156]
如图2和3进一步所示,盘元件保持器90可以设置在轴70的第二端72。
[0157]
盘元件保持器90附接到轴70的第二端72,使得轴70的旋转迫使盘元件保持器90随之旋转。
[0158]
盘元件保持器90被构造成接收盘元件99,使得当盘元件保持器90旋转时,盘元件99随之旋转。
[0159]
第一旋转传递部件被接收在容纳部60中。容纳部60设置在动力输出元件20中。更准确地说,容纳部60设置在动力输出元件20的内部动力输出元件30中。
[0160]
如图6所示,内部动力输出元件30的顶部31的内部空间33具有端表面34’。此外,内部动力输出元件30的底部35的内部空间37具有端壁39。分隔内部动力输出元件30的顶部31和底部35的壁限定了顶部31的内部空间33的端面34’和底部35的内部空间37的端面39。
[0161]
容纳部60形成为将内部动力输出元件30的顶部31和底部35分开的壁中的贯通孔。容纳部从顶部31的内部空间33的端面34’延伸到底部35的内部空间37的端面39。
[0162]
容纳部60的横截面形状(垂直于内部动力输出元件30的轴向方向截取)对应于第一旋转传递部件50的横截面形状(垂直于第一旋转传递部件50的轴向方向截取)。
[0163]
如图6、7a、7c所示,容纳部60具有主槽61。主槽具有面向内的表面62。
[0164]
容纳部60的主槽61被构造成接收第一旋转传递部件50的主体51。第一旋转传递部件50的主体51具有对应于槽61的形状,使得当第一旋转传递部件50
[0165]
旋转时,动力输出元件20随之旋转。第一旋转传递部件50的主体51的形状可以在图7b中看到。在图7c中可以看到槽61的形状,其对应于第一旋转传递部件50的主体51的形状并与之匹配。图7a示出了当连接在动力输出元件20的槽61中时第一旋转传递部件50的主体51。
[0166]
第一臂63从容纳部60的主槽61向外延伸。此外,第二臂65从容纳部60的主槽61向外延伸。如图所示,容纳部60的第一臂63和第二臂64在主槽61的径向相对位置从容纳部60的主槽61伸出。容纳部60的第一臂63被构造成接收第一旋转传递部件50的第一臂53。容纳部60的第二臂66被构造成接收第一旋转传递部件50的第二臂54。
[0167]
图7c还示出了容纳部的第一和第二臂63、64具有第二宽度w2。
[0168]
因此,容纳部60的横截面形状(垂直于内部动力输出元件30的轴向方向截取)对应于第一旋转传递部件50的横截面形状(垂直于第一旋转传递部件50的轴向方向截取)。形状相同,但是容纳部60略大于第一旋转传递部件50。
[0169]
因此,当动力输出元件20由如上所述的电马达150旋转时,形成在动力输出元件20中的容纳部60将旋转,并且稍微延迟,当容纳部60的臂63、64将抵靠在第一旋转传递部件50
的臂53、54上时,第一旋转传递部件50将开始旋转。由于尺寸差异而在动力输出元件20和第一旋转传递部件50之间提供的这种轻微松弛具有这样的后果,即如果动力输出元件20的旋转受到不均匀负载的影响,导致动力输出元件20相对于壳体10轻微倾斜,则倾斜不会传递到第一旋转传递部件50,从而不会传递到第一轴70,从而不会传递到盘元件99。并且,由于动力输出元件20的倾斜不会导致盘元件99的错位,因此盘元件99和传感器装置399之间的相互作用不受影响,并且可以获得动力输出元件20的旋转位置的更精确的测量。
[0170]
在图7a中,可以看出第一宽度w2略大于第二宽度w2。
[0171]
优选地,第一宽度(w1)比第二宽度(w2)小1-2mm。
[0172]
图4示出了本发明的一个实施例,其中马达单元1的部件被分成子单元。在图4中,壳体10被显示为分成三个部分,顶部11、底部12和端部13。
[0173]
例如如上所述,电马达150、盘元件99和齿轮机构200已经被包围在驱动子单元100中。如图所示,马达单元1可以进一步包括控制单元300,该控制单元300至少包括印刷电路板310,传感器装置399设置在该印刷电路板310上。控制单元300
[0174]
优选地还包括控制器件,例如用于处理从传感器装置399接收的旋转数据的处理器。控制单元可以进一步包括控制器件,诸如用于控制马达操作的处理器——例如至少部分基于从传感器装置399接收的旋转数据。马达单元的操作还可以由例如用户操作的外部装置来提供。控制信号可以无线地提供。在这种情况下,控制子单元可以包括无线接收器。然而,如图4所示,马达单元可以进一步包括绳子单元400。绳子单元400包括绳组410,其第一端411连接到控制子单元300,第二端连接到电连接器插头420。电连接器插头420允许连接到另一装置,例如控制器或输入面板等。绳子单元可以将数据传送到马达单元1的控制子单元300和从控制子单元300传送数据。
[0175]
此外,绳子单元400可以将电能传输到包括电池的单元和从包括电池的单元传输电能。然而,在一些实施例中,马达单元1可替代地或附加地包括用于给电马达150和控制单元300供电的电池。
[0176]
如上所述,图5以详细的分解图显示了图4的马达单元1的驱动子单元100。驱动子单元100包括外壳101。外壳101由顶部110和底部120形成。开口115设置在驱动子单元100的外壳101的顶部110中。此外,在驱动子单元100的外壳101的底部120中设置有未示出的开口,该开口的形状和尺寸允许传感器装置399位于盘元件99的底面附近。
[0177]
电马达150、齿轮机构200等设置在驱动子单元100的外壳101内部。顶部110和底部120可以通过使用图5中用130表示的螺钉来组装。
[0178]
壳体10、外壳101、齿轮和动力输出元件20优选在注射成型过程中由塑料模制而成。
[0179]
应当注意,附图和以上描述以简单和示意的方式示出了示例实施例。许多具体的机械细节没有示出,因为本领域的技术人员应该熟悉这些细节,并且它们只会不必要地使描述复杂化。例如,所使用的具体材料和具体的注射模制过程没有详细描述,因为据认为本领域技术人员能够找到合适的材料和合适的工艺来制造根据本发明的容器。
[0180]
附图标记列表
[0181]
1 马达单元/模块化构造系统马达单元
[0182]
10 壳体/单元壳体
[0183]
11 单元壳体的顶部
[0184]
11 单元壳体的底部
[0185]
11 单元壳体的端部
[0186]
15 穿过壳体的开口(形成用于动力输出元件的轴承)
[0187]
20 动力输出元件
[0188]
30 内部动力输出元件
[0189]
31 内部动力输出元件的顶部
[0190]
31
’ꢀ
内部动力输出元件的顶部的外端
[0191]
31
”ꢀ
内部动力输出元件的顶部的内端
[0192]
32 内部动力输出元件的顶部的外表面
[0193]
32
’ꢀ
凹口,在内部动力输出元件的顶部的外表面中形成为凹部
[0194]
33 内部动力输出元件的顶部的内部空间
[0195]
34 内部动力输出元件的顶部的内表面
[0196]
34
’ꢀ
内部动力输出元件的顶部的内部空间的端表面
[0197]
面
[0198]
35 内部动力输出元件的底部
[0199]
36 内部动力输出元件的底部的外表面
[0200]
37 内部动力输出元件的底部的内部空间
[0201]
38 内部动力输出元件的底部的面向内的表面/内表面
[0202]
39 内部动力输出元件的底部的内部空间的端表面
[0203]
40 外部动力输出元件
[0204]
41 外部动力输出元件的主体
[0205]
42 外部动力输出元件的上表面
[0206]
43 外部动力输出元件的下表面
[0207]
44 外部动力输出元件的外表面
[0208]
45 穿过外部动力输出元件的开口
[0209]
46 外部动力输出元件的内表面
[0210]
47 从外部动力输出元件的内表面升高形成的突起
[0211]
50 第一旋转传递部件
[0212]
51 第一旋转传递部件的主体
[0213]
52 第一旋转传递部件的主体的外表面
[0214]
53 第一旋转传递部件的第一臂
[0215]
54 第一旋转传递部件的第二臂
[0216]
55 第一旋转传递部件的主体的内部空间
[0217]
56 第一旋转传递部件的面向内的表面/内表面
[0218]
60 形成在动力输出元件中的容纳部
[0219]
61 容纳部的主槽
[0220]
62 容纳部的主槽的面向内的表面
[0221]
63 容纳部的第一臂
[0222]
64 容纳部的第二臂
[0223]
70 第一轴
[0224]
71 第一轴的第一端
[0225]
72 第一轴的第二端
[0226]
80 第二轴
[0227]
81 第二轴的第一端
[0228]
82 第二轴的第二端
[0229]
90 盘元件保持器(磁体保持器)
[0230]
99 盘元件(磁体)
[0231]
100 驱动子单元
[0232]
101 驱动子单元的外壳
[0233]
110 驱动子单元的外壳的顶部
[0234]
115 形成在驱动子单元外壳的顶部中的、穿过驱动子单元外壳的第一开口
[0235]
116 穿过驱动子单元外壳的第一开口的面向内的表面
[0236]
120 驱动子单元的外壳的底部
[0237]
130 螺钉
[0238]
150 电马达
[0239]
151 马达输出轴
[0240]
200 齿轮机构
[0241]
210 第一齿轮(在马达输出轴上)
[0242]
211 形成在第一齿轮的外表面中的齿轮齿
[0243]
220 第二齿轮(在第一轴上)
[0244]
221 第二齿轮的大直径部分
[0245]
222 在第二齿轮的大直径部分上形成的齿轮齿
[0246]
223 第二齿轮的小直径部分
[0247]
224 在第二齿轮的小直径部分上形成的齿轮齿
[0248]
225 穿过第二齿轮的贯通开口
[0249]
230 第三齿轮(在第二轴上)
[0250]
231 第三齿轮的大直径部分
[0251]
232 在第三齿轮的大直径部分上形成的齿轮齿
[0252]
233 第三齿轮的小直径部分
[0253]
234 在第三齿轮的小直径部分上形成的齿轮齿
[0254]
235 穿过第三齿轮的贯通开口
[0255]
240 第四齿轮(在第一轴上)
[0256]
241 第四齿轮的大直径部分
[0257]
242 在第四齿轮的大直径部分上形成的齿轮齿
[0258]
243 第四齿轮的小直径部分
[0259]
244 在第四齿轮的小直径部分上形成的齿轮齿
[0260]
245 穿过第四齿轮的贯通开口
[0261]
250 第五齿轮(在第二轴上)
[0262]
251 第五齿轮的大直径部分
[0263]
252 在第五齿轮的大直径部分上形成的齿轮齿
[0264]
253 第五齿轮的小直径部分
[0265]
254 在第五齿轮的小直径部分上形成的齿轮齿
[0266]
255 穿过第五齿轮的贯通开口
[0267]
260 第六齿轮(在第一轴上)
[0268]
261 第六齿轮的下部
[0269]
262 在第六齿轮的小直径部分上形成的齿轮齿
[0270]
263 第六齿轮的上部
[0271]
264 第六齿轮的上部的外表面
[0272]
265 穿过第六轮的贯通开口
[0273]
280 输出盘
[0274]
281 输出盘的下部
[0275]
282 输出盘的下部的成型外表面
[0276]
283 输出盘的上部
[0277]
284 输出盘的上部的外表面
[0278]
285 穿过输出盘的贯通开口
[0279]
300 控制子单元
[0280]
310 印刷电路板
[0281]
399 传感器
[0282]
400 绳子单元
[0283]
410 电绳组
[0284]
411 电绳组的第一端
[0285]
412 电绳组的第二端
[0286]
420 电连接器插头
[0287]
500 模块化构造系统
[0288]
510 第一类型构造元件
[0289]
511 第一类型构造元件的构造元件(砖块)
[0290]
512 第一类型构造元件的构造元件(板)
[0291]
520 第二类型构造元件
[0292]
521 第二类型构造元件的构造元件(双栓)
[0293]
522 第二类型构造元件的构造元件(梁)
[0294]
523 第二类型构造元件的构造元件(框架)
[0295]
524 构造元件(轴)
[0296]
530 用于模块化构造系统的连接器元件
[0297]
610 连接器旋钮
[0298]
620 旋钮接收开口
[0299]
630 圆柱形连接器部分(弹性连接器栓)
[0300]
631 设置在圆柱形连接器部分的自由端处的周向设置的卷边
[0301]
632 狭缝,形成在圆柱形连接器部分的纵向方向上,用于提供圆柱形连接器部分的弹性
[0302]
640 连接器开口
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1