安装多直驱风力发电机并联风电场附加阻尼控制器的方法与流程
1.本发明属于电气工程技术领域,尤其涉及安装多直驱风力发电机并联风电场附加阻尼控制器的方法。
背景技术:
2.2015年7月1日,新疆哈密地区以直驱永磁同步发电机(permanent magnet synchronous generator,pmsg)为主力机型的风电场出现了次同步频率范围内的持续功率振荡,并引发临近两座火电机组发生轴系扭振,危及电网的安全可靠运行。此外,在风电场输出电流中还发现超同步分量。随着风力发电等新能源大规模并网,次同步振荡问题已成为潜在的风险,若不能及时系统全面地研究应对策略和抑制措施,可能造成巨大的经济损失,甚至造成大范围稳定性事故。因此,加强抑制风电场次同步振荡措施的研究是十分必要且具有实际意义的。
3.目前,有较多的研究针对抑制风电场次同步振荡问题,主要分为以下两种。一是以双馈感应发电机为主力机型的风电场研究抑制次同步振荡的主要方法,具体有:1)在柔性交流输电系统、柔性直流输电系统的换流站上附加次同步阻尼控制;2)在双馈风电机转子侧换流器或电网侧换流器的控制回路上附加次同步阻尼控制;3)在双馈风电机转子侧换流器或电网侧换流器的控制回路上增设次同步滤波器。二是以pmsg为主力机型的风电场研究抑制次同步振荡的方法,具体有:1)在pmsg换流器上附加阻尼控制器抑制临近汽轮发电机与串补装置作用引发的次同步振荡;2)优化直驱风电场锁相环参数以降低风电场发生次同步振荡的风险。然而,现阶段大多数关于附加阻尼控制器抑制风电场次同步振荡的研究都是将风电场等效成一台风电机,如何将等效成一台风电机的附加阻尼控制器安装方法映射到含有多台风机的实际风电场中,目前这类工作还处于待研究状态。因此,将附加阻尼控制器应用到多直驱风力发电机并联风电场抑制风电场的次同步振荡具有重要的研究价值。同时,附加阻尼控制器在多直驱风力发电机并联风电场中安装地点的选择也是非常重要的。
4.开环模式谐振是将一个闭环系统划分为两个互联的子系统,即只包含一台风机的“风机子系统”以及包含其余风机在内的“电力系统其余部分子系统”,当两个子系统的模式相互靠近时,可能会引发闭环系统的失稳,即发生开环模式谐振。因此,本发明考虑使用开环模式谐振分析方法寻找安装附加阻尼控制器的最佳位置,达到抑制风电场系统次同步振荡的目的。
技术实现要素:
5.针对上述技术问题,本发明提出了安装多直驱风力发电机并联风电场附加阻尼控制器的方法,包括以下步骤:
6.步骤1:建立风电场中每一个直驱风力发电机以及风电场所接入电力系统各个动态元件的线性化状态空间模型;
7.步骤2:首先,建立以第1台pmsg为“风机子系统”和其余包含n
‑
1台pmsg的“电力系
统其余部分子系统”,构建两个子系统的互联模型;
8.步骤3:此时如果两个子系统发生开环模式谐振,根据两个开环子系统的留数预估闭环振荡模式,如果预估闭环振荡模式阻尼为负,此时多pmsg并联风电场系统发生开环模式谐振导致闭环系统失稳,则将附加阻尼控制器安装在第1台pmsg上抑制多pmsg并联风电场系统的次同步振荡;
9.步骤4:如果预估闭环振荡模式阻尼依然为正,此时多pmsg并联风电场系统发生开环模式谐振并未导致闭环系统失稳。此外,如果多pmsg并联风电场系统没有发生开环模式谐振,闭环系统稳定。则将第2台pmsg作为“风机子系统”,其余包含n
‑
1台pmsg的“电力系统其余部分子系统”,构建两个子系统的互联模型;
10.步骤5:此时如果两个子系统发生开环模式谐振,根据两个开环子系统的留数预估闭环振荡模式,如果预估闭环振荡模式阻尼为负,此时多pmsg并联风电场系统发生开环模式谐振导致闭环系统失稳,则将附加阻尼控制器安装在第2台pmsg上抑制多pmsg并联风电场系统的次同步振荡;
11.步骤6:如果预估闭环振荡模式阻尼依然为正,此时多pmsg并联风电场系统发生开环模式谐振并未导致闭环系统失稳。此外,如果多pmsg并联风电场系统没有发生开环模式谐振,闭环系统稳定。则将第3台pmsg作为风机子系统,其余包含n
‑
1台pmsg的电力系统其余部分子系统,并观察系统是否发生开环模式谐振。依次重复步骤2到步骤4,直到找到所有能引发开环模式谐振的风机子系统,并将附加阻尼控制器安装在发生开环模式谐振的风机子系统上。
12.优选地,步骤2、步骤4和步骤6包括:计算“风机子系统”和“电力系统其余部分子系统”两个开环子系统的振荡模式以及对应的留数。
13.本安装多直驱风力发电机并联风电场附加阻尼控制器的方法的有益效果如下:
14.1.通过将含n台并联pmsg风电场划分为两个互联的子系统,即只包含一台pmsg的“风机子系统”以及包含其余n
‑
1台风机在内的“电力系统其余部分子系统”,观察由两个开环子系统模式相互靠近引发闭环系统振荡失稳的情况,并将附加阻尼控制器安装在只含一台pmsg的“风机子系统”上以避免因发生开环模式谐振导致系统振荡失稳。
15.2.本发明不需要计算闭环系统的参与因子及振荡模式,避免了实际应用中难以建立闭环模型的瓶颈。
附图说明
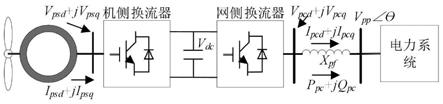
16.图1为pmsg的基本模型。
17.图2为n台pmsg并联构成风电场结构图。
18.图3为电力系统闭环互联模型示意图。
19.图4为含有附加阻尼控制器的由22台pmsg并联构成的风电场。
20.图5为失稳情况下未添加与添加附加阻尼控制器的非线性仿真结果图。
具体实施方式
21.本发明提出了安装多直驱风力发电机并联风电场附加阻尼控制器的方法,包括以下步骤:
22.步骤1:建立风电场中每一个直驱风力发电机以及风电场所接入电力系统各个动态元件的线性化状态空间模型。
23.步骤2:首先,建立以第1台pmsg为“风机子系统”和其余包含n
‑
1台pmsg的“电力系统其余部分子系统”,构建两个子系统的互联模型。
24.步骤3:此时如果两个子系统发生开环模式谐振,根据两个开环子系统的留数预估闭环振荡模式,如果预估闭环振荡模式阻尼为负,此时多pmsg并联风电场系统发生开环模式谐振导致闭环系统失稳,则将附加阻尼控制器安装在第1台pmsg上抑制多pmsg并联风电场系统的次同步振荡。
25.步骤4:如果预估闭环振荡模式阻尼依然为正,此时多pmsg并联风电场系统发生开环模式谐振并未导致闭环系统失稳。此外,如果多pmsg并联风电场系统没有发生开环模式谐振,闭环系统稳定。则将第2台pmsg作为“风机子系统”,其余包含n
‑
1台pmsg的“电力系统其余部分子系统”,构建两个子系统的互联模型。
26.步骤5:此时如果两个子系统发生开环模式谐振,根据两个开环子系统的留数预估闭环振荡模式,如果预估闭环振荡模式阻尼为负,此时多pmsg并联风电场系统发生开环模式谐振导致闭环系统失稳,则将附加阻尼控制器安装在第2台pmsg上抑制多pmsg并联风电场系统的次同步振荡。
27.步骤6:如果预估闭环振荡模式阻尼依然为正,此时多pmsg并联风电场系统发生开环模式谐振并未导致闭环系统失稳。此外,如果多pmsg并联风电场系统没有发生开环模式谐振,闭环系统稳定。则将第3台pmsg作为风机子系统,其余包含n
‑
1台pmsg的电力系统其余部分子系统,并观察系统是否发生开环模式谐振。依次重复步骤2到步骤4,直到找到所有能引发开环模式谐振的风机子系统,并将附加阻尼控制器安装在发生开环模式谐振的风机子系统上。
28.本实施方案的步骤2、步骤4和步骤6均包括:计算“风机子系统”和“电力系统其余部分子系统”两个开环子系统的振荡模式以及对应的留数。
29.本发明在具体实施时,单台pmsg的结构如图1所示。考虑如图2所示含n台并联pmsg接入电力系统的模型。选择图2中任意一台pmsg作为“风机子系统”,其余n
‑
1台pmsg及其余部分作为“电力系统其余部分子系统”,建立如图3所示的电力系统闭环互联模型。设x
w
为pmsg所有状态变量组成的列向量,v
w
为风机并网点的机端电压幅值,p
w
、q
w
分别为风机向电力系统注入的有功功率和无功功率。此时,由一台pmsg所构成的“风机子系统”其状态空间模型为
[0030][0031]
式中:a
w
为“风机子系统”的状态矩阵;b
w
、d
qv
和d
pv
分别为系数向量或系数;δ表示相应变量相对于其稳态值的增量。将式进行拉普拉斯变换,可以得到:
[0032][0033]
其中:
[0034][0035]
设含n
‑
1台pmsg及其余部分的“电力系统其余部分子系统”所有状态变量组成的列向量为x
g
,则“电力系统其余部分子系统”的状态空间模型为
[0036][0037]
式中:a
g
表示“电力系统其余部分子系统”的状态矩阵;b
p
、b
q
、d
p
和d
q
表示系数向量或系数。将式写成传递函数形式,有:
[0038]
δu
w
=g
p
(s)δp
w
+g
q
(s)δq
w
ꢀꢀꢀꢀꢀ
(5)
[0039]
其中:
[0040][0041]
根据式和式,可以得到如图3所示的电力系统闭环互联模型。其中,“风机子系统”为反馈环节,“电力系统其余部分子系统”为前馈环节。将式和式合并得到如图3所示的电力系统闭环互联模型,其线性化状态空间模型为
[0042]
δx=aδx
ꢀꢀꢀꢀꢀꢀꢀ
(7)
[0043]
其中:
[0044][0045]“风机子系统”和“电力系统其余部分子系统”间的动态交互对电力系统稳定性的影响可以用图3所示电力系统闭环互联模型开、闭环特征根的差异衡量。当图3所示系统开环时,设“风机子系统”的其中一个模式为λ
f
,则λ
f
是式中a
w
的一个特征根,称为开环风机模式。设“电力系统其余部分子系统”的其中一个模式为λ
q
,则λ
q
是式中a
g
的一个特征根,称为开环电力系统模式。开环“风机子系统”模式λ
f
及“电力系统其余部分子系统”模式λ
q
对应闭
环系统的模式估计可以通过留数计算得到,留数指标为:
[0046][0047]
其中r
gpi
、r
gqi
、r
wpi
和r
wqi
分别表示对应“风机子系统”和“电力系统其余部分子系统”模式的残差,且模式的残差,且
[0048]
开环“风机子系统”模式λ
f
对应闭环振荡模式估计为:
[0049][0050]
开环“电力系统其余部分子系统”模式λ
q
对应闭环振荡模式估计为:
[0051][0052]
式及为开环模式谐振情况下(λ
q
≈λ
f
),闭环模式和的估算公式。因此,留数可以用来衡量动态交互对系统模式的影响。随着开环“风机子系统”模式λ
f
逐渐接近“电力系统其余部分子系统”模式λ
q
,开环模式谐振发生时(λ
q
≈λ
f
),闭环模式和分布在其对应开环模式λ
q
和λ
f
的两侧。这样,其中一个闭环模式会出现在开环模式谐振点的右侧,导致系统稳定性降低。由式及可知,通过计算对应开环模式的留数可以预测出闭环系统模式的相对位置,当满足式时,
[0053][0054]
即大于λ
q
和λ
f
实部的绝对值时,和会移动到复平面上的不稳定区域,从而导致系统失稳。
[0055]
当发生开环模式谐振导致系统失稳时,将会对并联pmsg风电场系统产生严重危害。因此,为了抑制次同步振荡,提升系统振荡模式的阻尼,提出通过在合适位置添加附加阻尼控制器提高振荡模式的阻尼,保证系统的稳定性。
[0056]
因此,附加阻尼控制器安装地点的选择尤为重要。本发明中利用开环模式谐振分析方法,将含n台并联pmsg风电场划分为两个互联的子系统,即只包含一台pmsg的“风机子系统”以及包含其余n
‑
1台风机在内的“电力系统其余部分子系统”,观察由两个开环子系统模式相互靠近引发闭环系统振荡失稳的情况,并将附加阻尼控制器安装在只含一台pmsg的“风机子系统”上以避免因发生开环模式谐振导致系统振荡失稳。
[0057]
对于图4所示电力系统为一由22台pmsg并联构成的风电场。单台pmsg有功输出为0.5p.u.,功率因数为0.98。
[0058]
风电场不添加附加阻尼控制器时,其失稳振荡模式如表1第二列所示;通过开环模式谐振分析方法确认当第2台pmsg为“风机子系统”,其余pmsg为“电力系统其余部分子系统”时,两个子系统发生开环模式谐振导致系统失稳。此时,在第2台pmsg上添加附加阻尼控制器,其失稳振荡模式发生了改变,系统恢复稳定,具体如表1第三列所示。
[0059]
表1模式计算结果
[0060]
振荡模式未添加附加阻尼控制器添加附加阻尼控制器失稳模式2.88+j115.24
‑
0.78+j118.24
[0061]
从表1可以看出,将附加阻尼控制器安装在第2台pmsg上能够有效提升风电场系统失稳振荡模式的阻尼,验证了所提方法的正确性。对不添加附加阻尼控制器与添加附加阻尼控制的并联风电场模型进行非线性仿真,结果如图5所示,从图5可以得出所提选择附加阻尼控制器安装位置方法的正确性。因此,通过合理选择附加阻尼控制器安装地点能够有效降低风电场的失稳风险。
[0062]
此实施例仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1