一种大推力中置自动对焦马达的制作方法
1.本发明涉及自动对焦马达技术领域,尤其涉及一种大推力中置自动对焦马达。
背景技术:
2.音圈马达是一种利用来自永久磁钢的磁场与通电线圈导体产生的磁场中磁极间的相互作用产生有规律的运动的装置,广泛用于手机摄像头等电子装置中。现今越来越多的电子装置(例如平板计算机或智能型手机)皆具有照相或录像的功能,通过长焦距镜头系统的设置,用户可以拍出不同效果的照片,使得具有长焦距的镜头系统的电子装置也逐渐受到大众的喜爱。随着摄像技术的发展,现有的音圈马达已经广泛使用闭环反馈方式来进行对焦驱动。闭环音圈马达中,通常采用霍尔元件来感知活动组件所产生的动磁场,以此确定活动组件在对焦过程中的实时位置来形成闭环反馈,可以快速精确地计算出将活动组件驱动至对焦位置上所需的对焦驱动电流,具有快速对焦、精准对焦的优势。
3.传统的闭环马达需要额外增加和组装的部品包括霍尔芯片、霍尔磁石、磁石挡板、pcb板等以实现闭环反馈电路,因此相较常规马达,闭环马达的部品数量增多,由于部品数越多,组装难度越大,马达使用稳定性越低,是本领域的关键技术难点;现有技术驱动线圈通常也是通过与上/下弹簧激光焊接来形成导通电路,而马达动子(透镜载体)是靠上、下弹簧支撑而移动,上、下弹簧的抖动易造成焊接点脱落的现象,从而造成电路断路,使马达整体的故障率升高、可靠性降低。另外,由于音圈马达内部需要物理移动空间(即马达行程)实现镜头长焦距的驱动,而现有手机等的移动终端装置普遍要求轻薄化构造,难以实现大行程控制。
技术实现要素:
4.本发明的目的在于提出一种稳定性高并且可以提高动子的位移量,从而提高摄像装置调焦量的中置自动对焦马达。
5.为达到上述目的,本发明提出一种大推力中置自动对焦马达,包括定子外壳、动子、驱动组件、上弹簧和下弹簧;
6.所述驱动组件包括驱动磁石、驱动线圈、pcb模组和金属导线;所述动子外表面设有镭雕电线路,所述金属导线排布于所述线路内,形成lds走线;所述pcb模组和所述驱动线圈均设于所述动子的侧壁上,且均与所述lds走线实现电连接;
7.所述驱动磁石设于所述定子外壳内,所述动子设于所述定子外壳内,通过所述驱动磁石与所述驱动线圈之间产生的电磁力,实现所述动子沿垂直方向的竖直位移;
8.所述上弹簧设于所述动子的上方,所述上弹簧包括动子上搭接部和分别设于所述动子上搭接部左右两侧的压边,所述压边与所述动子上搭接部之间通过第一金属弹簧片相连接;所述动子上搭接部与所述动子的上表面固定连接,所述压边与预设于所述定子外壳内的固定支架固定连接;所述动子的上表面与所述固定支架之间存在高度差,使得所述第一金属弹簧片产生预形变;
9.所述下弹簧设于所述动子的下方,所述下弹簧包括动子下搭接部和底座搭接部,所述动子下搭接部与所述底座搭接部之间通过第二金属弹簧片相连接;所述动子下搭接部与所述动子的下表面固定连接,所述底座搭接部与所述定子外壳的底座固定连接;所述动子的下表面与所述底座之间存在高度差,使得所述第二金属弹簧片产生预形变。
10.进一步的,所述动子为透镜载体,所述透镜载体的中部设有用于安装透镜的安装孔。
11.进一步的,所述定子外壳的上表面设有与所述安装孔对应设置的通孔。
12.进一步的,所述pcb模组包括pcb板、霍尔芯片和电容;所述pcb板设于所述透镜载体外壳的侧壁,所述霍尔芯片和电容均设于所述pcb板上;所述霍尔芯片与所述lds走线实现电连接。
13.进一步的,所述驱动磁石数量为两个,两个所述驱动磁石呈向对面布置于所述定子外壳内;
14.所述驱动线圈的数量为两个,两个所述驱动线圈分别套接于所述透镜载体呈相对面的侧壁上;所述透镜载体置于所述定子外壳后,两个所述驱动线圈与两个所述驱动磁石呈一一相对布置;
15.所述pcb模组设于所述驱动线圈中心位置,使所述pcb模组内的霍尔组件与所述驱动磁石对向设置。
16.进一步的,还包括嵌埋于所述定子外壳底座内的电路连接件,所述lds走线与所述电路连接件实现电连接。
17.进一步的,所述透镜载体上表面设有用于避让所述第一金属弹簧片的避让槽;
18.所述透镜载体下表面设有用于避让所述第二金属弹簧片的凹槽。
19.进一步的,所述上弹簧两侧的所述压边压合于所述固定支架与所述驱动磁石的上端面之间;压合后的所述压边与所述固定支架通过点胶固定粘结。
20.进一步的,所述动子上搭接部为一块与所述透镜载体上表面相吻合的金属圈,所述金属圈表面设有点胶孔,通过点胶实现所述动子上搭接部与所述透镜载体之间的固定连接。
21.进一步的,所述下弹簧数量为四个,分别对应所述透镜载体的四个底角设置;
22.所述动子下搭接部通过焊接与所述透镜载体的下表面固定连接,所述底座搭接部通过焊接与所述定子外壳的底座固定连接。
23.与现有技术相比,本发明的优势之处在于:
24.1、本发明的中置自动对焦马达在透镜载体上形成镭雕导电线路(lds走线),通过lds走线实现霍尔芯片与底座嵌埋电路连接件连接,同时驱动磁石同时作为霍尔磁石,不需要额外增加和组装霍尔磁石、磁石挡板以及pcb板等组件,减少了闭环马达的组装部品数量,简化了马达的结构,易于马达的组装,从而也能提高马达的组装稳定性,使得马达具有对焦精准及对焦更快、功耗更低等特点。
25.2、本发明的驱动线圈固定于透镜载体上,因而驱动线圈与lds走线之间的电连接可靠性和稳定性高,也便于实现较大的电接面积,能减少导通不良的情况,降低马达结构的电流故障率,进而提高马达性能的稳定性。
26.3、本发明的上弹簧与下弹簧采用了与透镜载体上下表面之间的预形变安装结构,
相比于传统的弹簧与透镜载体上下表面的平行搭接结构,动子的体积可以做的更小,增加动子在定子外壳内的位移空间,从而提高动子在定子外壳内位移量,在应用于摄像组件的情况下,可以增加摄像头的调焦量。
附图说明
27.图1为本发明实施例中大推力中置自动对焦马达的透镜载体与马达内部结构示意图。
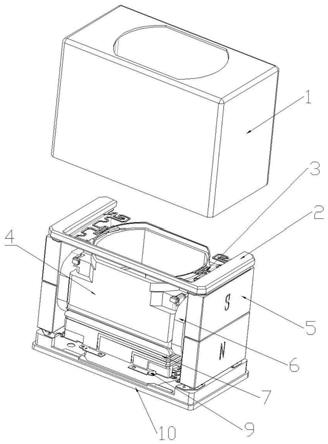
28.图2为本发明实施例中大推力中置自动对焦马达的爆炸图。
29.图3为本发明实施例中动子,即透镜载体表面lds走线布图。
30.图4为本发明实施例中上弹簧、固定支架和驱动磁石的压装结构图。
具体实施方式
31.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案作进一步地说明。
32.如图1和图2所示,本发明提出一种大推力中置自动对焦马达,包括定子外壳1、动子、驱动组件、上弹簧3和下弹簧9;
33.本实施例中动子为透镜载体4,透镜载体4的中部设有用于安装透镜的安装孔41,定子外壳1的上表面设有与安装孔41对应设置的通孔。
34.驱动组件包括驱动磁石5、驱动线圈6、pcb模组8和金属导线7;如图3所示,动子外表面设有镭雕电线路,金属导线7排布于线路内,形成lds走线;pcb模组8和驱动线圈6均设于动子的侧壁上,且均与lds走线实现电连接。pcb模组8包括pcb板、霍尔芯片和电容;pcb板设于透镜载体4外壳的侧壁,霍尔芯片和电容均设于pcb板上;霍尔芯片与lds走线实现电连接。
35.驱动磁石5设于定子外壳1内,动子设于定子外壳1内,通过驱动磁石5与驱动线圈6之间产生的电磁力,实现动子沿垂直方向的竖直位移(即图2中z轴方向的位移)。本实施例中,还包括嵌埋于所述定子外壳1底座10内的电路连接件,所述lds走线与所述电路连接件实现电连接。
36.本实施例中驱动磁石5数量为两个,两个驱动磁石5呈向对面布置于定子外壳1内;驱动线圈6的数量为两个,两个驱动线圈6分别套接于透镜载体4呈相对面的侧壁上;透镜载体4置于定子外壳1后,两个驱动线圈6与两个驱动磁石5呈一一相对布置,本实施例驱动磁石5数量不仅限于两块,可以由多块磁石组合构成或者由整块的多级充磁磁石构成,只要能达到驱动及感应效果的磁石组合均应在本发明的保护范围内。
37.在本实施例中,pcb模组8设于所述驱动线圈6中心位置,即pcb板设于驱动线圈6的中心位置,使pcb板上霍尔芯片与驱动磁石5对向设置,从而进一步保证霍尔芯片与驱动磁石5之间的感应效果,能达到很好的闭环控制效果,使得马达自动对焦更快更精准。
38.本发明的中置自动对焦马达在透镜载体4上形成镭雕导电线路(lds走线),通过lds走线实现霍尔芯片与底座10嵌埋电路连接件连接,同时驱动磁石5同时作为霍尔磁石,不需要额外增加和组装霍尔磁石、磁石挡板以及pcb板等组件,减少了闭环马达的组装部品数量,简化了马达的结构,易于马达的组装,从而也能提高马达的组装稳定性,使得马达具
有对焦精准及对焦更快、功耗更低等特点。
39.本发明的驱动线圈6固定于透镜载体4上,因而驱动线圈6与lds走线之间的电连接可靠性和稳定性高,也便于实现较大的电接面积,能减少导通不良的情况,降低马达结构的电流故障率,进而提高马达性能的稳定性。
40.在本实施例中,上弹簧3设于动子的上方,上弹簧3包括动子上搭接部31和分别设于动子上搭接部31左右两侧的压边32,压边32与动子上搭接部31之间通过第一金属弹簧片33相连接;动子上搭接部31与动子的上表面固定连接,压边32与预设于定子外壳1内的固定支架2固定连接;动子的上表面与固定支架2之间存在高度差,使得第一金属弹簧片33产生预形变;
41.下弹簧9设于动子的下方,下弹簧9包括动子下搭接部91和底座搭接部92,动子下搭接部91与底座搭接部92之间通过第二金属弹簧片93相连接;动子下搭接部91与动子的下表面固定连接,底座搭接部92与定子外壳1的底座10固定连接;动子的下表面与底座10之间存在高度差,使得第二金属弹簧片93产生预形变。
42.预形变的设计结构相比于传统的平行搭接结构,动子的体积可以做的更小,增加动子在定子外壳1内的位移空间,从而提高动子在定子外壳1内位移量,在应用于摄像组件的情况下,可以增加摄像机的调焦量。
43.在本实施例中,透镜载体4上表面设有用于避让第一金属弹簧片33的避让槽;透镜载体4下表面设有用于避让第二金属弹簧片93的凹槽。避让槽和凹槽的设计,方便动子在上下位移的同时,不会与弹簧片发生碰撞以及摩擦,进一步提高动子在定子外壳1内的位移量。
44.在本实施例中,如图4所示,上弹簧3两侧的压边32压合于固定支架2与驱动磁石5的上端面之间;压合后的压边32与固定支架2通过点胶固定粘结。动子上搭接部31为一块与透镜载体4上表面相吻合的金属圈,金属圈表面设有点胶孔,通过点胶实现动子上搭接部31与透镜载体4之间的固定连接。
45.在本实施例中,下弹簧9数量为四个,分别对应透镜载体4的四个底角设置;动子下搭接部91通过焊接与透镜载体4的下表面固定连接,底座搭接部92通过焊接与定子外壳1的底座10固定连接。
46.本发明装置的工作原理为:当向z轴驱动线圈6通入电流后,z轴驱动线圈6与z轴驱动磁石5之间就会产生电磁力,根据弗莱明左手法则,由于电磁力的作用驱使z轴动子,即透镜载体4沿镜头光轴方向(即z轴)作直线移动,即使绕线载体最终停留z轴于驱动线圈6与z轴驱动磁石5之间产生的电磁力与上、下弹簧9的弹性力的合力达到相均衡状态时的位置点。通过向z轴驱动线圈6通入既定的电流,可控制使绕线载体移动至目标位置,从而达到自动调焦的目的。
47.本发明闭环控制原理为:霍尔芯片通过对对向设置的驱动磁石5磁场强弱感应来反馈和演算镜头在z轴方向的驱动位置,并进一步通过向z轴驱动线圈6输入电流的大小来控制镜头达到图像最清晰的位置点(z轴自动对焦),从而实现自动对焦的闭环控制。
48.上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍
属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1