一种三相三电平高功率因数整流装置及方法
1.本发明涉及整流器技术领域,尤其涉及一种三相三电平高功率因数整流装置及方法。
背景技术:
2.传统的整流器大多由整流变压器和二极管整流桥或相控晶闸管整流桥组成,因此网侧功率因数低、谐波含量大,对电网造成了严重的污染,随着电力电子技术的发展,设计出具有高功率因数和低谐波含量的脉宽调制整流器变得尤为重要。多电平pwm整流器凭借其对开关器件耐压要求低,且在同等开关频率下的谐波含量远小于两电平整流器谐波含量等优势,近几年逐渐成为了电力电子装置在高压大功率应用场合的研究热点。
3.二极管钳位型整流器(neutral point clamped,npc),由akrira nabae等人于1980年第一次提出。图2为二极管钳位型整流器单相桥臂拓扑图,图3为二极管钳位型整流器完整拓扑图,共包含三个桥臂,每个桥臂由四个全控型开关管串联后再与两个钳位二极管连接,二极管的中点与直流侧两相同电容的中点连接,两电容电压之和为直流侧电压。虽然该拓扑结构相对简单,但也存在很大的问题,其中中点平衡问题是主要问题:在实际电路中,直流侧两边的电容不可能完全相同,充放电的过程总会有所差异,上下出现的压差会导致中点电位不平衡。而中点电位的波动问题作为二极管钳位型整流器整流器的核心问题,直接关系到整流器是否能正常运行:中点电位波动时,电容器的使用寿命会因为直流侧电容器的不平衡分压而大幅度缩短,并在交流侧引起低次谐波,不符合电力系统绿色、高功率因数的要求,同时也降低了整流器的工作效率。此外,只有当直流侧电容电压平衡时,开关管承受的电压应力才保持均衡,开关器件使用寿命才能有所保障。
技术实现要素:
4.针对上述现有技术的不足,本发明提供一种三相三电平高功率因数整流装置。
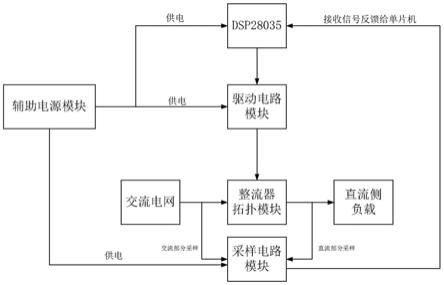
5.为解决上述技术问题,本发明所采取的技术方案是:一种三相三电平高功率因数整流装置,包括整流器拓扑模块、驱动电路模块、辅助电源模块、微控制器模块和采样电路模块;
6.所述整流器拓扑模块的输入端与交流电网相连,输出端与直流侧负载相连;
7.所述驱动电路模块与整流器拓扑模块相连,同时连接微控制器模块;
8.所述采样电路模块包括交流电压采样电路、交流电流采样电路和直流电压采样电路,分别从交流电网输出侧和整流器拓扑模块输出侧截取信号,同时连接微控制器模块以实现反馈;
9.所述辅助电源模块分别与微控制器、驱动电路及采样电路相连,提供各部分需要的电压。
10.进一步的,所述微控制器模块外接键盘,利用键盘输入数据或命令实现简单的人机通信。
11.所述辅助电源模块以光耦ps2801和可控精密稳压源tl431作为反馈部分,稳定输出电压。
12.所述驱动电路模块采用光耦隔离的驱动电路,既保证dsp不会被烧毁,又可以放大pwm信号。
13.所述直流电压采样电路用于测量整流器拓扑模块中的直流侧电容c1和电容c2两侧的电压值,将采集的数据反馈给微控制器模块,由微控制器模块判断两个电容的电压值的大小,并采用电容中点平衡控制算法来控制电容c1和电容c2两端的电压平衡;所述交流电流采样电路对电容中点的桥臂电流进行采样,确定电容充放电状态。
14.所述电容中点平衡控制算法以空间矢量脉宽调制算法svpwm为基础,在空间矢量脉宽调制算法svpwm的正负小矢量作用时间tp和tn上分别加入中点平衡因子f,通过改变正负小矢量作用时间,从而重新分配调制函数,以实现直流侧电容器的平衡分压。
15.所述在空间矢量脉宽调制算法svpwm的正负小矢量作用时间tp和tn上分别加入中点平衡因子f的过程如下:
[0016][0017]
其中,tpn=tp+tn,f的取值在
‑
1到1之间;若u
c1
>u
c2
,当tp<tn时才能保证中点电容平衡,此时f取值范围(0,1);若u
c1
<u
c2
,当tp>tn时才能保证中点电容平衡,此时f取值范围(
‑
1,0)。
[0018]
另一方面,本发明还提供一种采用上述三相三电平高功率因数整流装置进行整流的方法,包括如下步骤:
[0019]
步骤1:微控制器模块首先配置系统时钟,即处理器运行时间基准,降低芯片整体耗能;
[0020]
步骤2:向芯片写入程序语言,实现功能单元的配置,初始化输入、输出口;
[0021]
步骤3:设置关中断,等待中断条件实现后进入中断;
[0022]
步骤4:初始化pie中断向量表、epwm模块及adc采样模块,保证对采样回来的数字量进行一次数模转换,将电压电流转换回模拟量后再进行后续计算;
[0023]
步骤5:将采样电压电流及电容中点平衡控制算法都放在同一个调制函数中,实时采样数据信号,并利用调制函数判断是否实现中点平衡;
[0024]
步骤6:若实现中点平衡,即达到中断条件,进入中断子程序;若未实现中点平衡,即未达到中断条件,则继续采样,以采样模拟量为依据判断是否进入下一步中断子程序。
[0025]
采用上述技术方案所产生的有益效果在于:
[0026]
1、本发明提供的装置和方法从安全和经济角度出发,充分利用二极管中点钳位型三电平整流器结构相对简单,网侧电流谐波含量低于两电平整流器等优点,在空间矢量脉宽调制(space vector pulse width modulation,svpwm)算法中,先将该矢量分解为离其最近的两个正负小矢量,两个正负小矢量的作用大小以作用时间长短表示,以不同时间比例的电压矢量合成最终的电压矢量,保证生成电压波形最大程度近似于正弦波。
[0027]
2、本发明提供的装置在微控制器模块中应用了一种电容中点平衡算法,在抑制中
点电位波动方面体现出较大的优越性,极大程度上保证了整流器的安全运行。
附图说明
[0028]
图1为本发明实施例中的三相三电平高功率因数整流装置结构示意图;
[0029]
图2为本发明背景技术中的二极管钳位型整流器单相桥臂拓扑图;
[0030]
图3为本发明背景技术中的二极管钳位型整流器完整拓扑图;
[0031]
图4为本发明实施例中的辅助电源模块直流12v电压的反馈控制电路原理图;
[0032]
图5为本发明实施例中的驱动电路模块原理图;
[0033]
图6为本发明实施例中的直流电压采样电路原理图;
[0034]
图7为本发明实施例中的交流电压采样电路原理图;
[0035]
图8为本发明实施例中的交流电流采样电路原理图;
[0036]
图9为本发明实施例中采用三相三电平高功率因数整流装置进行整流的方法流程图。
具体实施方式
[0037]
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
[0038]
如图1所示,本实施例中三相三电平高功率因数整流装置如下所述:
[0039]
装置包括整流器拓扑模块、驱动电路模块、辅助电源模块、微控制器模块和采样电路模块;
[0040]
本实施例中所述整流器拓扑模块如图2和图3所示,包括依次连接的三相电源输入端、进线电感和电阻、整流电路、直流侧电容;四个全控型mosfet开关管串联后再与钳位二极管连接组成一个桥臂,二极管的中点与直流侧两相同电容的中点连接,直流侧电感并联两大小相等的直流电容c1和c2。所述微控制器模块,实时控制驱动电路模块,以便实现开关管的开通和关断;所述驱动电路模块放大主控i/o口的信号,同时连接整流电路和单片机,与微控制器模块配合发挥作用;
[0041]
本实施例中,所述微控制器模块采用德州仪器公司生产的c2000tm系列中dsp芯片tms320f28035。该芯片具有高效32位cpu,采用哈佛总线架构,内部还有128k闪存可用。芯片正常工作时工作电压为3.3v。主要用到的外设有epwm模块和adc模块,epwm用于输出pwm信号,adc用于对电流电压进行采样且采样的模拟量的值保证在0到3.3v之间,若超过3.3v可能将dsp芯片烧坏。系统使用10mhz的晶振,通过dsp倍频后得到60mhz的主频,产生pwm信号开关频率为20khz。在pwm信号输出后加上uln2003非门阵列,提高pwm的驱动能力并将其反向。lm1117
‑
3.3是一种稳压芯片,将5v电压降为3.3v后为dsp供电。
[0042]
所述整流器拓扑模块的输入端与交流电网相连,输出端与直流侧负载相连;
[0043]
所述驱动电路模块与整流器拓扑模块相连,同时连接微控制器模块;
[0044]
所述采样电路模块包括交流电压采样电路、交流电流采样电路和直流电压采样电路,分别从交流电网输出侧和整流器拓扑模块输出侧截取信号,同时连接微控制器模块以实现反馈;
[0045]
所述辅助电源模块分别与微控制器、驱动电路及采样电路相连,提供各部分需要
的电压。
[0046]
进一步的,所述微控制器模块外接键盘,利用键盘输入数据或命令实现简单的人机通信。
[0047]
所述辅助电源模块以光耦ps2801和可控精密稳压源tl431作为反馈部分,稳定输出电压。
[0048]
本实施例中,辅助电源模块直流12v电压的反馈控制电路如图4所示。dsp、模拟电路采样模块、驱动电路等都需要供电,且工作电压各不相同,全部采用外部的直流电源供电并不现实,所以硬件设计中的辅助电源是极为重要的一环,有了辅助电源,只需要在外部提供一个电源给辅助电源供电,便能保证各模块的供电正常。
[0049]
辅助电源的基本拓扑为反激电路。光耦ps2801和可控精密稳压源tl431作为反馈部分。辅助电源工作在+24v到+48v的电压下,触发使电路正常工作后,可以输出+5v、+12v和
‑
12v的直流电压,还有一个高频信号。变压器分别产生三路输出电压,其中两路用于输出对称的正负12v电压。为了保证输出电压能稳定在12v,需要用到反馈控制,具体为使用电阻对12v直流电压分压后,与tl431芯片的基准值2.5v进行比较,使流过tl431的电流变化控制光耦ps2801副边的电流大小,ps2801与控制芯片tl2845的comp脚相连,电流的变化引起pwm占空比的变化,进而控制副边输出电压。当输出电压大于12v时,光耦副边电流变大,pwm信号占空比会变小,副边输出电压变小,同理当输出电压小于12v时,pwm占空比会变大,输出电压也就变大,以此稳定输出电压。输出参考零点为变压器中点。
[0050]
所述驱动电路模块采用光耦隔离的驱动电路,既保证dsp不会被烧毁,又可以放大pwm信号。
[0051]
本实施例中,驱动电路模块如图5所示。微控制单元多输出的是3.3v或者5v的电压,无法驱动开关管的开通与关断,因此需要用到驱动电路对电压进行放大处理才能控制开关管。本设计使用一种利用光耦隔离的驱动电路,既保证dsp不会被烧毁,又可以放大pwm信号以控制开关管。
[0052]
在本实施例整流装置的驱动电路模块中,首先由辅助电源产生的高频信号经过高频变压器后,整流滤波得到+15v、
‑
8v和参考零电位。将+15v和
‑
8v与光耦芯片tlp350的8脚vcc+和5脚vcc
‑
连接,pwm与3脚(cathode)相连,辅助电源的+5v与2脚(anode)相连。当pwm为高电平时光耦输出为
‑
8v,当pwm为低电平时光耦输出为高电平,该驱动电路的输出是与原来的逻辑反向,但在主控板设计中,pwm输出会经过uln2003反向,最终保证驱动电路输出逻辑与dsp输出的逻辑一致。
[0053]
所述直流电压采样电路用于测量整流器拓扑模块中的直流侧电容c1和电容c2两侧的电压值,将采集的数据反馈给微控制器模块,由微控制器模块判断两个电容的电压值的大小,并采用电容中点平衡控制算法来控制电容c1和电容c2两端的电压平衡;所述交流电流采样电路对电容中点的桥臂电流进行采样,确定电容充放电状态。
[0054]
本实施例中,采样电路用于对系统的反馈量进行采集。由于实际拓扑中的电压值远大于3.3v,已无法被dsp采样,因此在采样电路中需要对采集的电气量进行缩放,使之保持在0到3.3v之间,同时也是对dsp的保护。本整流器设计中以模拟电路作为采样电路。tl074是一种常用的运算放大器芯片,供电电压由辅助电源的正负12v提供。
[0055]
直流电压采样电路如图6所示。运算放大器具有虚短虚断的特性,给电阻r配不同
的阻值可以使运算放大器得到不同的缩放倍数。
[0056]
交流电压采样电路如图7所示。由于dsp不能对负电压进行采样,因此需要在交流采样电路中加入一个直流偏置,使交流电压变成位于0到3.3v间的直流电压进行采样。
[0057]
交流电流采样电路如图8所示。选用acs712
‑
20霍尔电流传感器采样电感电流作为采样电路的输入,因为dsp不能直接采样电流信号,因而需要转换电流信号为电压后进行采样。选择直流5v电压为acs712霍尔电流传感器提供电压,在没有电流流过传感器的情况下输出2.5v的基准电压。电流采样电路的原理与电压跟随器相类似,即输入电压与输出电压相等。
[0058]
所述电容中点平衡控制算法以空间矢量脉宽调制算法svpwm为基础,在空间矢量脉宽调制算法svpwm的正负小矢量作用时间tp和tn上分别加入中点平衡因子f,通过改变正负小矢量作用时间,从而重新分配调制函数,以实现直流侧电容器的平衡分压。
[0059]
所述在空间矢量脉宽调制算法svpwm的正负小矢量作用时间tp和tn上分别加入中点平衡因子f的过程如下:
[0060][0061]
其中,tpn=tp+tn,f的取值在
‑
1到1之间;若u
c1
>u
c2
,当tp<tn时才能保证中点电容平衡,此时f取值范围(0,1);若u
c1
<u
c2
,当tp>tn时才能保证中点电容平衡,此时f取值范围(
‑
1,0)。
[0062]
从外,本实施例还提供一种采用上述三相三电平高功率因数整流装置进行整流的方法,其流程如图9所示,包括如下步骤:
[0063]
步骤1:微控制器模块首先配置系统时钟,即处理器运行时间基准,降低芯片整体耗能;
[0064]
步骤2:向芯片写入程序语言,实现功能单元的配置,初始化输入、输出口;
[0065]
步骤3:设置关中断,等待中断条件实现后进入中断;
[0066]
步骤4:初始化pie中断向量表、epwm模块及adc采样模块,保证对采样回来的数字量进行一次数模转换,将电压电流转换回模拟量后再进行后续计算;
[0067]
步骤5:将采样电压电流及电容中点平衡控制算法都放在同一个调制函数中,实时采样数据信号,并利用调制函数判断是否实现中点平衡;
[0068]
步骤6:若实现中点平衡,即达到中断条件,进入中断子程序;若未实现中点平衡,即未达到中断条件,则继续采样,以采样模拟量为依据判断是否进入下一步中断子程序。
[0069]
本实施例中,dsp的程序是基于c语言的语法进行编程的。在装置上电启动后,需要初始化dsp,包括初始化系统时钟、中断初试化、初始化i/o口配置、epwm和adc的寄存器配置等。epwm初始化是对pwm的周期、计数方式、动作方式、死区等的相关寄存器进行配置。adc初始化是对采样周期和转换模式的相关寄存器进行配置。i/o口配置主要是对i/o模式、复用功能的选择等功能的相关寄存器进行配置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1