一种基于电流谐波注入的电机24阶噪声抑制方法与流程
1.本发明涉及电机噪声抑制技术领域,具体地说是一种基于电流谐波注入的电机24阶噪声抑制方法。
背景技术:
2.随着汽车工业的发展,人们对汽车舒适度的要求逐渐提升。电动助力转向系统eps,尤其是管柱式电动转向系统epsc,因其电子助力驱动单元安装在驾驶舱,驾驶人员更容易接收到电机24阶噪声,容易造成客户抱怨。
3.24阶噪声的主要来源包括电机反电动势谐波、开关管死区效应、svpwm控制方式引起的三相电流5、7次谐波。
4.因此,需要设计一种基于电流谐波注入的电机24阶噪声抑制方法,有效抑制电机24阶噪声,降低eps电机24阶噪音。
技术实现要素:
5.本发明的目的是克服现有技术的不足,提供了一种基于电流谐波注入的电机24阶噪声抑制方法,有效抑制电机24阶噪声,降低eps电机24阶噪音。
6.为了达到上述目的,本发明提供一种基于电流谐波注入的电机24阶噪声抑制方法,包括如下步骤:步骤1,将三相电流采样模块采集到的电机三相电流,经过clark变换和park变换,转化成id反馈电流、iq反馈电流;步骤2,在iq反馈电流中注入6阶电频率谐波电流iq
comp
;步骤3,对于注入6阶电频率谐波电流后的iq反馈电流,标定补偿的iq反馈电流6次谐波幅值i
gain
和补偿的iq反馈电流6次谐波初始相位角θ
offset
的数值,以抵消iq反馈电流中的6阶谐波分量;步骤4,id指令电流与id反馈电流,iq指令电流与iq反馈电流分别经过pi控制器,调节出ud*控制电压、uq*控制电压;步骤5,ud*控制电压、uq*控制电压经过逆clark变换和逆park变换,转换成uα*电压、uβ*电压,uα*电压、uβ*电压控制电机,达到抑制电机24阶噪声的目的。
7.所述的6阶电频率谐波电流iq
comp
的补偿公式为iq
comp = i
gain
ꢀ×ꢀ
sin(6wet +θ
offset
),i
gain
为补偿的iq电流6次谐波幅值,θ
offset
为补偿的iq电流6次谐波初始相位角,we为电角速度频率,t为时间。
8.所述的标定补偿的iq电流6次谐波幅值i
gain
和补偿的iq电流6次谐波初始相位角θ
offset
的数值是通过对电机24阶扭矩的fft分析数据观测补偿效果而确定的。
9.所述的id指令电流、iq指令电流由电流指令生产模块生成。
10.本发明同现有技术相比,通过在iq电流内注入6阶电频率谐波,并标定i
gain
和θ
offset
值,抵消iq电流中的6阶谐波分量,实现24阶噪声的抑制,降低eps电机噪声,提升驾驶员的驾乘舒适性。
附图说明
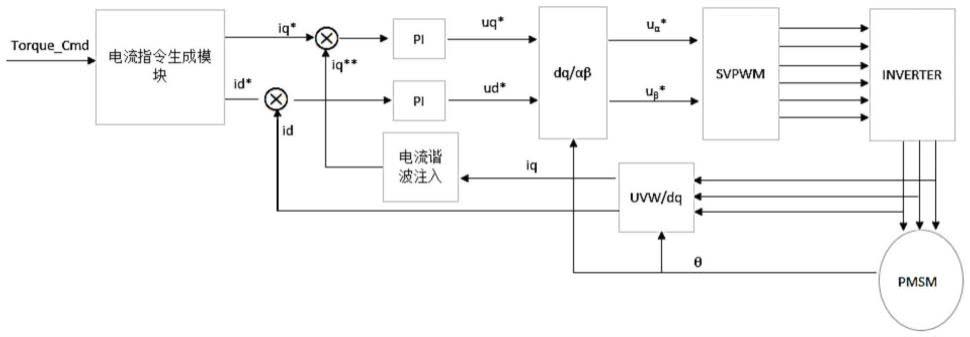
11.图1为本发明的iq电流谐波注入框图。
12.图2为电流谐波注入前,电机扭矩24阶谐波示意图。
13.图3为电流谐波注入后,电机扭矩24阶谐波示意图。
具体实施方式
14.现结合附图对本发明做进一步描述。
15.电机24阶噪音来源进行分析:对电机扭矩进行fft分析,电机扭矩中24阶谐波含量明显高于其它阶次,由此可知,电机24阶噪音来自电机扭矩24阶谐波。
16.电机24阶噪音来源推导:带5、7次电流谐波的三相电流公式如下:ia = i1×
cos(wet +θ1) + i5×
cos(-5wet +θ5) + i7×
cos(7wet +θ7)
ꢀ①
,ib = i1×
cos(wet +θ
1 ‑ꢀ
2/3
×
pi) + i5×
cos(-5wet +θ5‑ꢀ
2/3
×
pi) + i7×
cos(7wet +θ7‑ꢀ
2/3
×
pi)
ꢀ②
,ic = i1×
cos(wet +θ
1 +2/3
×
pi) + i5×
cos(-5wet +θ5+ 2/3
×
pi) + i7×
cos(7wet +θ7+ 2/3
×
pi)
ꢀ③
。其中,i1为相电流基波幅值,i5为5次谐波幅值,i7为7次谐波幅值,θ1为基波初始相位角,θ5为5次谐波初始相位角,θ7为7次谐波初始相位角,we为电角速度频率。
17.park变换和clark变换公式如下:c3s-2s=
×④
,c2s-2r =
ꢀ⑤
。
18.联立公式
①②③④⑤
求解: id = i1×
cos(θ1)+ i5×
cos(-6wet
ꢀ‑
θ5) + i7×
cos(6wet +θ7)
ꢀ⑥
, iq = i1×
sin(θ1)+ i5×
sin(-6wet
ꢀ‑
θ5) + i7×
sin(6wet +θ7)
ꢀ⑦
。
19.机械角速度频率和电角速度频率关系:w
e = w
m ×np ⑧
。其中,wm为机械角速度频率,n
p
为电机极对数。
20.电机扭矩方程:t
e = 1.5
ꢀ×ꢀnp ×
iq
ꢀ×
[ id
×
(ld-lq) + ψf]
ꢀ⑨
。
[0021]
将公式
⑥⑦⑧
带入
⑨
中可知:t
e = 1.5
ꢀ×ꢀnp ×ꢀ
ψ
f ×ꢀ
[i1×
sin(θ1)+ i5×
sin(-6wet
ꢀ‑
θ5) + i7×
sin(6wet +θ7)]
ꢀ⑩
,其中,ψf为电机转子永磁体磁链。
[0022]
由公式
⑧⑩
可知:t
e = 1.5
ꢀ×ꢀnp ×ꢀ
ψ
f ×ꢀ
[i1×
sin(θ1)+ i5×
sin(-24wmt
ꢀ‑
θ5) + i7×
sin(24wmt +θ7)]
ꢀ⑪
。
[0023]
由以上推导可知,电机三相电流中的5、7次谐波导致了电机扭矩中含有24阶谐波,从而引起了人耳能够听到的电机24阶噪声。
[0024]
参见图1,一种基于电流谐波注入的电机24阶噪声抑制方法,包括如下步骤:步骤1,将三相电流采样模块采集到的电机三相电流,经过clark变换和park变换,转化成id反馈电流、iq反馈电流。
[0025]
步骤2,在iq反馈电流中注入6阶电频率谐波电流iq
comp
,6阶电频率谐波电流iq
comp
的补偿公式为iq
comp = i
gain
ꢀ×ꢀ
sin(6wet +θ
offset
),i
gain
为补偿的iq电流6次谐波幅值,θ
offset
为补偿的iq电流6次谐波初始相位角,we为电角速度频率,t为时间。
[0026]
步骤3,对于注入6阶电频率谐波电流后的iq反馈电流,标定补偿的iq反馈电流6次谐波幅值i
gain
和补偿的iq反馈电流6次谐波初始相位角θ
offset
的数值,以抵消iq反馈电流中
的6阶谐波分量。其中,标定补偿的iq电流6次谐波幅值i
gain
和补偿的iq电流6次谐波初始相位角θ
offset
的数值是通过对电机24阶扭矩的fft分析数据观测补偿效果而确定的。
[0027]
步骤4,id指令电流、iq指令电流由电流指令生产模块生成。id指令电流与id反馈电流,iq指令电流与iq反馈电流分别经过pi控制器,调节出ud*控制电压、uq*控制电压。
[0028]
步骤5,ud*控制电压、uq*控制电压经过逆clark变换和逆park变换,转换成uα*电压、uβ*电压,uα*电压、uβ*电压控制电机,达到抑制电机24阶噪声的目的。
[0029]
参见图2、图3,使用高精度扭矩传感器分别采集未做补偿和补偿后的电机扭矩数据,对电机扭矩进行fft分析,观测电流谐波注入前后电机扭矩24阶谐波变化。对比电流谐波注入前后数据,注入6阶iq电流谐波后,电机扭矩24阶谐波幅值明显得到抑制,本发明方式实测有效。
[0030]
本发明通过在iq电流内注入6阶电频率谐波,并标定i
gain
和θ
offset
值,抵消iq电流中的6阶谐波分量,实现24阶噪声的抑制,降低eps电机噪声,提升驾驶员的驾乘舒适性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1