一种主动变惯容减震系统
1.本发明属于结构消能减震技术领域,涉及到一种主动变惯容减震系统,是一种可应用于建筑结构中的主动可变惯容系统,用来抑制建筑结构在地震或风振下的振动。
背景技术:
2.在已经过去的数十年里,极端天气气候事件及其次生衍生灾害呈增加趋势,台风、地震等自然灾害都对建筑物的安全造成了严重威胁,同时对建筑抗震性能提出了更高要求。因此,如何提高建筑结构的抗震性能以保证人民的生命财产安全具有重要的战略意义。结构振动控制装置和策略能够有效地提高建筑结构抗震性能;在结构振动控制策略中,半主动控制策略结合了被动控制优异的出力性能和主动控制的智能控制算法,被广泛应用于土木结构振动控制。
3.半主动控制的实施依赖于具体的装置类型,现有的半主动装置目前主要有主动变阻尼装置和主动变刚度装置两大类。近些年来,惯容器成为土木领域研究的热点;惯容器是一种加速度型的减震器,它的理论模型是一个两节点单元,单元出力是一种惯性力,正比于两节点间的相对加速度,比例系数的大小表征了惯容器的出力性能。研究表明惯容器可以显著减小输入结构的荷载强度,从而降低结构响应,而且惯容器对长周期结构减震效果更明显。
4.最新研究表明,惯容器在整个结构振动周期并不总是有利于振动抑制,它在结构减速阶段会延长结构减速的过程,从而使得位移响应过大。解决这个问题的方法就是在惯容器的飞轮和转动轴承之间引入棘轮装置,使得飞轮只能单向转动,并且只有当结构处于加速阶段时飞轮才会受驱动,而飞轮也永远不会向结构回传荷载。虽然棘轮的离合作用可以避免能量回传给结构,但由于缺乏耗能机制飞轮获得的动能无法被消耗或转移,因此飞轮无法在下一个振动周期开始前保持零位的静止状态,惯容器耗能减震的作用就无法持续高效地发挥。
技术实现要素:
5.为解决上述问题,本发明提供一种主动变惯容减震的方案,使得惯容器只在结构加速阶段出力,通过应用发电机原理利用磁阻力实现惯容器飞轮减速以保证飞轮在每个振动周期开始前的零位状态,并尝试将飞轮动能转化为其他形式能量。
6.本发明的技术方案是:
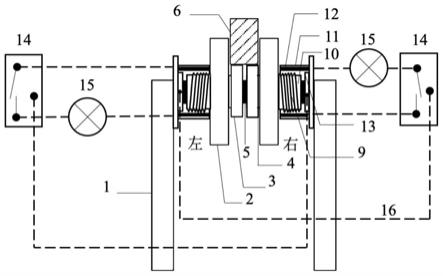
7.一种主动变惯容减震系统,包括两套可变惯容系统、发电机系统和智能控制系统,结构梁6左右两侧各一套。
8.所述的可变惯容系统,包括支撑1、固定转轴5、齿轮4、飞轮2和棘轮3,两套可变惯容系统共用一个固定转轴5;固定转轴5位于结构梁6的下方,安装在支撑1上,齿轮4、飞轮2和棘轮3通过轴承安装在固定转轴5上,且齿轮4与飞轮2固定连接,齿轮4、飞轮2和棘轮3均绕固定转轴5转动;结构梁6的底部安装有齿条,棘轮3与齿条啮合,齿轮4与棘轮3啮合,棘轮
3的转动带动齿轮4转动,从而带动飞轮2转动;且结构梁6左右两侧的可变惯容系统中的棘轮3工作方向相反。
9.所述的发电机系统,包括线圈9、转子10、定子11和磁极12;转子10安装在飞轮2的外侧且二者固定连接,都绕固定转轴5转动,线圈9缠绕在转子10;定子11与支撑1固定连接,磁极12安装在定子11上,转子10位于定子11的内部。
10.所述的智能控制系统包括编码器13、智能开关14、负载15和信号线16;编码器13安装在转子10和定子11之间用于测量转子10的角速度,从而获得飞轮2的角速度;发电机系统的两个电枢和负载15接入智能开关14,且智能开关14还与结构梁6另一侧的编码器13连接,即每一侧的智能开关14均与对立侧的编码器13通过信号线16连接,以监测结构梁6运动方向的改变;所述的智能开关14可以进行可编程控制设计,当结构梁6在一方向达到位移极值转而反向运动时,编码器13识别出来,信号传入智能开关14,闭合智能开关14发电机系统开始工作,转子10受到磁场阻力开始减速制动,从而带动飞轮2减速制动。
11.当结构梁6产生水平位移时,结构梁6通过齿条传动带动棘轮3转动;棘轮3内置的钩爪7,当结构梁6处于加速状态时,钩爪7参与工作,棘轮3带动齿轮4转动,齿轮4与飞轮2绕固定转轴5产生同轴转动,飞轮2转动产生的惯性力作为驱动系统运行的作用力f,作用力f等大反馈给结构梁6,阻碍结构梁6运动,作用力f即可变惯容系统工作时的惯容力,作用力f的大小与飞轮2与齿轮4的半径比以及飞轮2质量成正比;当结构梁6开始减速运动时,钩爪7不参与工作,齿轮4和飞轮2保持原有转动状态,此时棘轮3产生离合效应,可变惯容系统没有作用力反馈给结构梁6,即f=0;每当结构梁6的运动方向发生改变时,智能控制系统开始工作,两侧的编码器13通过监测飞轮2的运动状态,传递信号给智能开关14以接通负载15,发电机系统开始工作提供磁阻力使得飞轮2减速制动,使飞轮2逐渐静止。
12.本发明的有益效果:本发明保证了惯容器在结构加速阶段提供惯性力,在结构减速阶段不提供力,并且能够让飞轮在特定时间段通过发电机原理减速制动,保证惯容器飞轮在开始工作前的零位静止状态。
附图说明
13.图1是配置可变惯容系统的结构;
14.图2是可变惯容系统中的齿轮、棘轮和飞轮构造简图;
15.图3是主动变惯容系统构造示意图;
16.图中:1支撑;2飞轮;3棘轮;4齿轮;5固定转轴;6结构梁;7勾爪;8轴承滚珠;9线圈;10转子;11定子;12磁极;13编码器;14智能开关;15负载;16信号线。
具体实施方式
17.以下结合技术方案和附图详细叙述本发明的具体实施方式。
18.图1是配置可变惯容系统的结构,包括支撑1、飞轮2、棘轮3、齿轮4和固定转轴5,如图2所示,齿轮3中内置勾爪7,齿轮4、飞轮2和棘轮3通过轴承和轴承滚珠8安装在固定转轴5上。可变惯容系统可以在结构梁6开始减速时将飞轮2转动和结构梁6的运动脱离开,避免飞轮2能量回传到结构;但有一点不足就是飞轮2无法自动回归静态,因此无法保证飞轮2在结构每个振动周期持续从零开始工作,实现离合惯容器的分段出力模型。因此,本发明设计了
图3所示的主动变惯容系统,设计流程以及工作原理具体如下:
19.设计流程:
20.(1)在结构梁6左右振动的两个方向分别安装由支撑1、齿轮2、棘轮3、飞轮4和固定转轴5组成的可变惯容系统,且左右两个方向的棘轮3的工作方向相反,当结构梁6分别向左向右运动时,可以分别驱动左右棘轮3并传动左右齿轮4带动左右飞轮2转动;
21.(2)将发电机系统的转子10安装在飞轮2外侧,并通过固定转轴5同轴转动,发电机系统的定子11与支撑1固结,当飞轮2转动时,缠有线圈9的转子10一起转动;
22.(3)在两侧发电机系统内部的转子10和定子11之间安装编码器13,用以监测与转子10同轴转动的飞轮2的角速度;由于结构加速阶段的运动方向与飞轮2的运动方向一致,通过编码器13获得飞轮2的角速度,从而可以识别结构运动状态的变化;
23.(4)将一侧发电机系统的两个电枢、另一侧发电机系统内的编码器13、该侧负载15接入智能开关14,并对智能开关14进行控制设计,通过编码器13的信号信息决定负载15是否闭合接入电枢电路;
24.工作原理:
25.(1)当结构梁6向左右两个方向运动时,图3所示的左右可变惯容系统的棘轮3受到结构梁6驱动分别开始运行,左右飞轮2开始转动,可变惯容系统产生惯性力并通过齿条接触反馈给结构梁6从而抑制结构振动;
26.(2)当结构梁6向左运动过程中,图3中左侧可变惯容系统开始提供惯性力,当结构梁6速度达到最大时,惯性力消失,当结构梁6运动到左侧最大位移时,结构梁6速度为0;在下一个时刻结构梁6将开始向右运动,此时闭合左侧的智能开关14,接通左侧负载15,左侧飞轮2在发电机系统磁场阻力下减速制动。因此,左侧飞轮2减速制动的发生条件可以通过判断右侧飞轮2是否开始转动,即结构梁6运动方向是否发生切换而决定。安置在右侧转子10上的编码器13可实时测得飞轮2的转速,结构梁6开始向右运动,即当其转速变化δω
r
大于0时,接通左侧智能开关14。
27.(3)当结构梁6向右运动过程中,图3中右侧可变惯容系统开始提供惯性力,当结构梁6速度达到最大时,惯性力消失,当结构梁6运动到右侧最大位移时,结构速度为0;在下一个时刻结构梁6将开始向左运动,此时闭合右侧的智能开关14,接通右侧负载15,右侧飞轮2在发电机系统磁场阻力下减速制动。结构梁6开始向左运动,即当左侧编码器13测得的转速变化δω
l
大于0时,接通右侧智能开关14。
28.(4)经过以上设计,可以实现当δω
r
>0时,闭合左侧智能开关14;当δω
l
>0时,闭合右侧智能开关14。当智能开关14闭合后,飞轮2将在一定时间内减速为零,以保证每个振动周期都能从静止启动。该主动变惯容系统的控制力f可以实现为:当f=0,当其中,b为可变惯容系统工作时提供的惯容系数,和分别为结构梁6所在结构的速度和加速度响应。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1