一种大功率风力发电机用可控型集成磁齿轮箱的控制方法
1.本发明涉及一种风电齿轮箱的控制方法,尤其是一种大功率风力发电机用可控型集成磁齿轮箱的控制方法,属于风力发电技术领域。
背景技术:
2.双馈型风力发电系统主要由风轮、齿轮箱、双馈型发电机(dfig)、变流器系统等构成。dfig是一个高速、体积小的发电机,由于风轮低转速运行,因此通常采用高增速比的齿轮箱把较低的风轮转速提升到高速的发电机转子转速。
3.半直驱型永磁风力发电系统采用低增速比的齿轮箱,以提高发电机的转速,从而使得半直驱型风力发电机的体积缩小。
4.鉴于目前风电齿轮箱存在上述缺陷,直驱型永磁风力发电系统不采用齿轮箱,但这导致直驱型永磁风力发电机体积大、笨重,且随着海上风电的发展,这种风力发电机的容量越来越大,其体积和重量必然越来越大,不能满足海上风电轻量化、小型化的要求。如果新型齿轮箱克服了上述缺陷,则风力发电系统即可选用新型齿轮箱+高速永磁风力发电机,从而实现海上风电机组轻量化、小型化的目标。
5.但现有齿轮箱采用机械齿轮啮合,需要复杂的注油润滑系统,体积大、笨重、成本高、噪声大、故障率高,需要定期维护;一旦发生故障,则维修费用高昂、停机时间长,带来巨大经济损失。此外,双馈型风力发电系统和半直驱型风力发电系统的主要损耗来源于齿轮箱和变流器系统,其中有65%左右的系统损耗来源于齿轮箱。因此,迫切需要研发新型齿轮箱,以期降低系统的成本、损耗以及运维费用,提高系统运行性能及其可靠性。
6.磁齿轮具有物理隔离的特性,无机械接触,因而具有无磨损、免维护、无噪声、无需润滑、能够过载保护等优势,近年来得到越来越多的重视和应用。但现有磁齿轮传输转矩较小,而且不可控,不能适用于兆瓦级(mw级)大功率风电机组,影响其在风力发电系统中推广应用。
技术实现要素:
7.本发明的主要目的在于:针对现有技术的不足和空白,本发明提供一种大功率风力发电机用可控型集成磁齿轮箱的控制方法,实现风电机组低风速启动,同时可辅助控制发电机转速,从而可大大降低大型风电机组,尤其是双馈型风力发电机组的运行维护成本,提高系统运行性能和可靠性。
8.为了达到以上目的,本发明所述一种大功率风力发电机用可控型集成磁齿轮箱,包括:第一级可控型集成同轴磁齿轮、第二级同轴磁齿轮、第三级同轴磁齿轮;所述可控型集成同轴磁齿轮包括:第一外转子磁齿轮、第一内转子磁齿轮和调磁定子;所述调磁定子包括调磁铁芯块和电枢绕组,所述电枢绕组嵌放在所述调磁铁芯块之间,并与调磁定子变流器连接;所述第一级可控型集成同轴磁齿轮的主动轴与风轮主轴连接,其从动轴与所述第二级同轴磁齿轮的主动轴相连;所述第二级同轴磁齿轮的从动轴与所述第三级同轴磁齿轮
的主动轴相连,所述第三级同轴磁齿轮的从动轴与风力发电机的转轴固定。
9.本发明一种大功率风力发电机用可控型集成磁齿轮箱的控制方法,包括以下步骤:
10.步骤1,当风速v
w
达到切入风速后,启动所述调磁定子变流器,按电磁转矩方程调节调磁定子电流,产生适当的电磁转矩t
e
,与风轮转矩t
w
一起驱动所述第一外转子磁齿轮旋转,实现低风速启动;
11.步骤2,当风速v
w
大于切入风速低于额定风速,所述调磁定子变流器按电磁转矩方程改变调磁定子电流以调节调磁定子电流产生的电磁转矩t
e
,进而按运动方程控制所述风轮的转速ω,与风电机组变流器一起控制风力发电机的转速;
12.步骤3,当风速v
w
超过额定风速,所述调磁定子变流器使调磁定子电流减小,其产生的电磁转矩t
e
随之降低;当风速继续增大,则使调磁定子电流反向,从而产生反向电磁转矩t
e
(此时该电磁转矩t
e
为阻力矩),按电磁转矩方程改变调磁定子电流以调节调磁定子电流产生的电磁转矩t
e
,进而按运动方程辅助控制所述风轮的转速ω维持在其额定转速,与风电机组变流器一起控制风力发电机的转速维持在风力发电机的额定转速,实现风力发电机恒功率输出;
13.步骤4,当风速v
w
超过切出风速,则所述调磁定子变流器继续增大所述调磁定子的反向电流,以提供足够的反向电磁转矩t
e
(即阻力矩),使得所述风轮的转速ω大大降低,辅助风电机组的刹车系统刹车;
14.步骤5,当电网侧发生低电压故障时,所述调磁定子变流器使所述调磁定子的电流反向,从而产生反向电磁转矩t
e
,按电磁转矩方程调节调磁定子电流大小,进而按运动方程控制所述风轮的转速ω使之降低,以降低风力发电机的转速和输出功率,实现低电压穿越。
15.步骤1、步骤2、步骤3和步骤5中所述电磁转矩方程为:
[0016][0017]
式中,i
sd
、i
sq
分别为所述调磁定子电流的d轴分量和q轴分量,ψ
sd
、ψ
sq
、ψ
o1
分别为所述调磁定子磁链的d轴分量、q轴分量以及所述第一外转子磁齿轮的磁链,p
s1
为所述电枢绕组的极对数。
[0018]
步骤2、步骤3和步骤5中所述运动方程为:
[0019][0020]
式中,t
w
为所述风轮提供的风轮转矩,t
e
为所述调磁定子电流产生的电磁转矩,t
leq
为折算到所述第一主动轴的等效负载转矩,j
eq
为折算到所述第一主动轴的等效转动惯量,ω为所述风轮的角速度。
[0021]
式(2)中的风轮转矩t
w
按下式计算:
[0022][0023]
式中,ρ为空气密度,r为风轮转动半径,v
w
为风速,c
t
为转矩系数。
[0024]
本发明的有益效果是:
[0025]
通过控制调磁定子电流的大小和方向,进而灵活改变电枢绕组产生的电磁转矩的
大小和方向,可辅助实现风力发电机低风速启动、恒功率输出、低电压穿越,同时可辅助刹车,使刹车更为轻便,减小刹车对风电机组的机械冲击,可大大降低对风电机组的刹车系统的要求,提高风电机组寿命、降低运维成本。
附图说明
[0026]
图1为本发明采用的双馈型风力发电系统拓扑结构示意图。
[0027]
图2为本发明所述可控型集成磁齿轮箱结构示意图。
[0028]
图3为本发明所述第一级可控型集成同轴磁齿轮示意图。
[0029]
图4为本发明所述第一级可控型集成磁齿轮及其与调磁定子变流器连接示意图。
[0030]
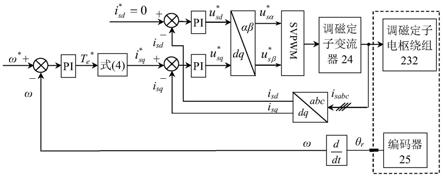
图5为本发明调磁定子变流器控制框图。
[0031]
其中,1
‑
第一级可控型集成同轴磁齿轮;2
‑
第二级同轴磁齿轮;3
‑
第三级同轴磁齿轮;4
‑
第一联轴器;5
‑
第二联轴器;6
‑
机座;7
‑
风轮,71
‑
风轮主轴;8
‑
发电机联轴器;9
‑
双馈型风力发电机;11
‑
第一主动轴;12
‑
第一主动轴轴承;13
‑
第一从动轴;14
‑
第一从动轴轴承;15
‑
第一左端板;16
‑
第一右端板;17
‑
第一支架;21
‑
第一外转子磁齿轮;22
‑
第一内转子磁齿轮;23
‑
调磁定子;231
‑
调磁铁芯块,232
‑
电枢绕组;24
‑
调磁定子变流器;25
‑
编码器。
具体实施方式
[0032]
下面结合附图,对本发明作进一步详细说明。
[0033]
如图1所示,本发明采用的双馈型风力发电系统拓扑结构包括风轮7及其主轴71、本发明可控型集成磁齿轮箱、发电机联轴器8和双馈型风力发电机9。
[0034]
如图1、图2所示,本发明可控型集成磁齿轮箱是一种三级增速箱,包括:低速级,即:第一级可控型集成同轴磁齿轮1,中速级,即:第二级同轴磁齿轮2,高速级,即:第三级同轴磁齿轮3,以及第一联轴器4、第二联轴器5、机座6等。第一级可控型集成同轴磁齿轮1的第一主动轴11与风轮7的主轴71连接;第一从动轴13通过第一联轴器4与第二级同轴磁齿轮2的主动轴相连;第二级同轴磁齿轮2的从动轴通过第二联轴器5与第三级同轴磁齿轮3的主动轴相连,第三级同轴磁齿轮3的从动轴通过发电机联轴器8与双馈型风力发电机9的转轴固定。
[0035]
如图3、图4所示,第一级可控型集成同轴磁齿轮1包括:第一主动轴11、第一主动轴轴承12、第一从动轴13、第一从动轴轴承14、第一左端板15、第一右端板16、若干第一支架17,以及第一外转子磁齿轮21、第一内转子磁齿轮22和调磁定子23。
[0036]
调磁定子23位于第一外转子磁齿轮21和第一内转子磁齿轮22之间,调磁铁芯块231通过绝缘垫片(或绝缘板)用螺栓固定安装在第一右端板16上。
[0037]
如图4所示,调磁定子23包括沿圆周均匀分布的调磁铁芯块231和电枢绕组232,电枢绕组232为三相交流绕组,嵌放在调磁铁芯块231之间,并与调磁定子变流器24连接,调磁定子变流器为三相交流逆变器。
[0038]
本发明一种大功率风力发电机用可控型集成磁齿轮箱的控制方法是:
[0039]
步骤1,如图3、图4、图5所示,当风速v
w
达到切入风速后,启动调磁定子变流器24,使调磁定子23的电枢绕组232通入三相交流电流i
sa
、i
sb
、i
sc
(以下称为调磁定子电流),经过abc/dq坐标变换,得到dq旋转坐标系下的调磁定子电流的d轴、q轴分量i
sd
、i
sq
,并按电磁转
矩方程调节i
sq
,产生适当的电磁转矩t
e
,与风轮转矩t
w
一起作用于第一外转子磁齿轮21,使之旋转,实现低风速启动;
[0040]
其中,电磁转矩方程按下述方式获得:
[0041]
因为第一外转子磁齿轮21与调磁定子23构成外转子隐极式永磁同步电机,所以,根据电机理论,调磁定子电流产生的电磁转矩方程为:
[0042][0043]
式中,i
sd
、i
sq
分别为调磁定子电流的d轴、q轴分量,ψ
sd
、ψ
sq
、ψ
o1
分别为调磁定子磁链的d轴、q轴分量以及第一外转子磁齿轮21的磁链,p
s1
为电枢绕组232的极对数。
[0044]
风轮转矩t
w
按下式计算:
[0045][0046]
式中,ρ为空气密度,r为风轮转动半径,v
w
为风速,c
t
为转矩系数(通过实验获得)。
[0047]
步骤2,当风速v
w
小于低于额定风速v
n
,如图5所示,由编码器25测得风轮转速ω,风轮转速参考值ω
*
与ω作差,经pi控制器得到电磁转矩参考值t
e*
,根据式(1)可得i
sq
的参考值i
sq*
为:
[0048][0049]
i
sq*
与i
sq
作差,经pi控制器得到调磁定子电压的q轴分量参考值u
sq*
;同时令调磁定子电流的d轴分量i
sd
的参考值i
sd*
=0,并与i
sd
作差,经pi控制器得到调磁定子电压的d轴分量参考值u
sd*
;经dq/αβ坐标变换后得到u
sα*
和u
sβ*
,送入svpwm模块调制后得到驱动信号,控制调磁定子变流器24产生所需的调磁定子电流,调节其电磁转矩t
e
,进而按运动方程控制风轮7的转速ω,与风力发电机组变流器一起控制风力发电机9的转速;
[0050]
运动方程为:
[0051][0052]
式中,t
w
为风轮7提供的风轮转矩,由式(3)计算得到;t
e
为电枢绕组232产生的电磁转矩,t
leq
为本发明所述磁齿轮箱折算到第一主动轴11的等效负载转矩,ω为风轮7的角速度,j
eq
为本发明所述磁齿轮箱折算到第一主动轴11的等效转动惯量,按下式计算:
[0053]
j
eq
=j1+g
12
j2+(g1g2)2j3+g2j4[0054]
式中,j1、j2、j3、j4分别为第一级可控型集成同轴磁齿轮1的第一主动轴11、第二级同轴磁齿轮2的主动轴、第三级同轴磁齿轮3的主动轴、第三级同轴磁齿轮3的从动轴的转动惯量,g1、g2、g3分别为第一级可控型集成同轴磁齿轮1、第二级同轴磁齿轮2、第三级同轴磁齿轮3的增速比,g为本发明所述磁齿轮箱的总增速比。
[0055]
步骤3,当风速v
w
超过额定风速v
n
,调磁定子变流器24使调磁定子电流减小,其产生的电磁转矩t
e
随之降低;当风速继续增大,则使调磁定子电流反向,从而产生反向电磁转矩t
e
,该电磁转矩t
e
为阻力矩,此时,风轮转速参考值ω
*
为其额定转速ω
n
,其余按步骤2所述方法控制调磁定子变流器24产生所需的调磁定子电流,调节其电磁转矩t
e
,进而按运动方程式(2)控制风轮7的转速ω维持在额定转速ω
n
,以辅助控制风力发电机9维持在额定转
速,以实现发电机恒功率输出;
[0056]
步骤4,当风速v
w
超过切出风速,则调磁定子变流器24继续增大调磁定子的反向电流,以提供足够的辅助反向电磁转矩t
e
(即阻力矩),使得风轮7的转速ω大大降低,此时,作为例子,可令ω
*
=10%ω
n
,其余按步骤2所述方法控制调磁定子变流器24产生所需的调磁定子电流,调节其电磁转矩t
e
,进而按运动方程式(2)控制风轮7的转速ω使之降低,从而使得刹车更为轻便,减小刹车对系统的机械冲击,可大大降低对风电机组的刹车系统的要求,提高可靠性。
[0057]
步骤5,当电网侧发生低电压故障时,调磁定子变流器24使调磁定子的电流反向,从而产生反向电磁转矩t
e
,此时,风轮转速参考值ω
*
与电网电压跌落幅度k(k<1)有关,作为例子,可令ω
*
=kω
p
,其中,ω
p
为电压跌落时刻前的风轮转速,其余按步骤2所述方法控制调磁定子变流器24产生所需的调磁定子电流,调节其电磁转矩t
e
,进而按运动方程式(2)控制风轮7的转速ω使之降低,进而降低风力发电机9的转速和输出功率,以实现低电压穿越。
[0058]
总之,本发明通过控制调磁定子电流的大小和方向,灵活改变调磁定子产生的电磁转矩,可辅助实现风力发电机恒功率输出、低电压穿越,同时可使刹车更为轻便,减小刹车对风电机组的机械冲击,可大大降低对风电机组的刹车系统的要求,提高风电机组寿命。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1