无刷直流电机抑制起动转矩脉动控制方法
1.本发明涉及无刷直流电机的技术领域,具体涉及一种无刷直流电机抑制起动转矩脉动控制方法。
背景技术:
2.随着电力电子技术的日益成熟和飞快发展,无刷直流电机在技术上不断实现突破,已经在各个领域得到广泛的应用,如电动车、家用电器等方面,并且由于机械加工技术的革新,其生产成本也大大降低。
3.无刷直流电机是由电动机主体和驱动器组成,是一种典型的机电一体化产品,其不仅具有高扭矩、高效率、体积小、可靠性高、结构简单等特点,还具有优良的调速性能和较小的稳态转速误差,在运转效率、转速精度和低速转矩等方面都比其他技术控制的变频器性能更好。传统无刷直流电机多采用二二导通方式,一个电周期内换相六次,由于电机的电枢绕组存在电感,使得绕组电流从某一相切换到下一相时出现延时情况,从而产生转矩脉动,对于制造精良的无数直流电机,它的齿槽转矩脉动和谐波转矩脉动都比较小,然而换相转矩脉动可以达到平均转矩的百分之五十左右。
4.现有技术中申请公布号为cn107171605a公开了一种bldcm二二导通与三三导通切换方法,具体公开了利用无刷直流电机的霍尔位置信号、dsp芯片、cpld模块分别逻辑运算出二二导通和三三导通的程序模块,让无刷直流电机在3s处由二二导通切换到三三导通运行模式。主要是利用软件编程来实现无刷直流电机的二二导通与三三导通切换的。
5.而本发明提供的一种将二二导通与三三导通相结合的控制方法,在一个电周期内由传统的六步换相变换成十二步换相,并且由霍尔传感器获取转子的初始位置,来抑制换相时所产生的转矩脉动问题,实现无刷直流电机的平稳起动。
技术实现要素:
6.本发明提供了一种无刷直流电机抑制起动转矩脉动的控制方法,将二二导通方式与三三导通方式相结合,在一个电周期内由传统的六步换相变换成十二步换相,并且由霍尔传感器获取转子的初始位置,通过多次换相来抑制无刷直流电机起动时所产生的转矩脉动问题,实现电机的平稳起动。
7.为了达到上述目的,本发明是通过以下技术方案来实现的:
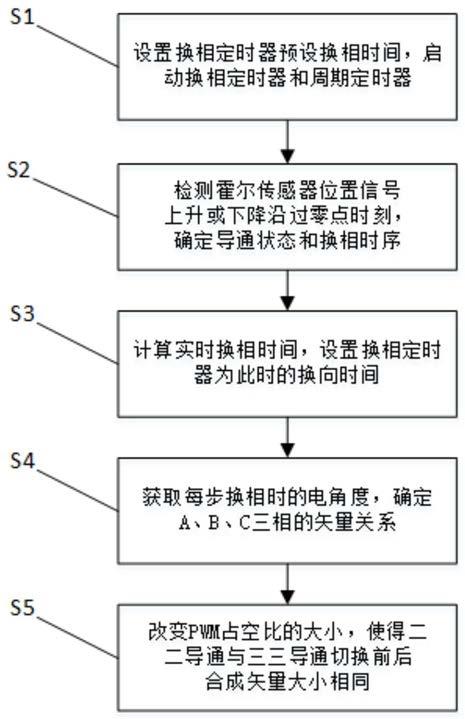
8.本发明是无刷直流电机抑制起动转矩脉动控制方法,包括如下步骤:
9.步骤1:设置换相定时器的换向时间为预设换相时间,启动换相定时器和周期定时器;
10.步骤2:检测三相霍尔传感器位置信号上升或下降沿过零点的时刻,确定功率开关管的导通状态,以及换相时序;
11.步骤3:计算实时换相时间,设置换相定时器设置为此时的换向时间;
12.步骤4:获取每步换相时对应的电角度,确定每步换相时a、b、c三相的矢量关系;
13.步骤5:改变换相时pwm占空比的大小,使得二二导通与三三导通切换前后所合成的矢量大小相同。
14.本发明的进一步改进在于:无刷直流电机换相电路控制mos管导通顺序有:t1、t4
→
t1、t4、t6
→
t1、t6
→
t1、t3、t6
→
t3、t6
→
t2、t3、t6
→
t2、t3
→
t2、t3、t5
→
t2、t5
→
t2、t4、t5
→
t4、t5
→
t1、t4、t5。
15.本发明的进一步改进在于:具体的换相控制逻辑如下:当检测霍尔传感器a相上升沿过零点时,功率开关管t1、t4导通,对应的a相绕组通正电,b相绕组通负电,此时换相时序为30
°
,计算此时的换向时间为t并设置换相定时器的时间为t;
16.当检测到实时换相时间为2t时,换相定时器置零,功率开关管t1、t4、t6导通,a相绕组通正电,b相和c相绕组通负电,此时换相时序为60
°
;
17.当检测到霍尔传感器c相下降沿过零点时,功率开关t1、t6导通,对应的a相绕组通正电,c相绕组通负电,换相时序为90
°
,计算此时的换向时间为3t并设置换相定时器的时间为t;
18.当检测到实时换相时间为4t时,换相定时器置零,功率开关管t1、t3、t6导通,a相和b相绕组通正电,c相绕组通负电,此时换相时序为120
°
;
19.当检测到霍尔传感器b相上降沿过零点时,功率开关t3、t6导通,对应的b相绕组通正电,c相绕组通负电,换相时序为150
°
,计算此时的换向时间为5t并设置换相定时器的时间为t;
20.当检测到实时换相时间为6t时,换相定时器置零,功率开关管t2、t3、t6导通,b相绕组通正电,a相和c相绕组通负电,此时换相时序为180
°
;
21.当检测到霍尔传感器a相下降沿过零点时,功率开关t2、t3导通,对应的b相绕组通正电,a相绕组通负电,换相时序为210
°
,计算此时的换向时间为7t并设置换相定时器的时间为t;
22.当检测到实时换相时间为8t时,换相定时器置零,功率开关管t2、t3、t5导通,b相和c相绕组通正电,a相绕组通负电,此时换相时序为240
°
;
23.当检测到霍尔传感器c相上升沿过零点时,功率开关t2、t3导通,对应的b相绕组通正电,a相绕组通负电,换相时序为270
°
,计算此时的换向时间为9t并设置换相定时器的时间为t;
24.当检测到实时换相时间为10t时,换相定时器置零,功率开关管t2、t4、t5导通,c相绕组通正电,a相和b相绕组通负电,此时换相时序为300
°
;
25.当检测到霍尔传感器b相下降沿过零点时,功率开关t4、t5导通,对应的c相绕组通正电,b相绕组通负电,换相时序为330
°
,计算此时的换向时间为11t并设置换相定时器的时间为t;
26.当检测到实时换相时间为12t时,换相定时器置零,功率开关管t1、t4、t5导通,对应的a相和c相绕组通正电,b相绕组通负电,此时换相时序为360
°
。
27.本发明的进一步改进在于:步骤3中实时换相时间计算如下:
28.29.其中,t
t
为实时换相时间的值,td为预设pwm的占空比,ne为所述无刷直流电机的额定转速,p为所述无刷直流电机的极对数。
30.本发明的进一步改进在于:无刷直流电机的负载小于额定负载的40%时,无刷直流电机的pwm预设占空比为0~1%,负载大于40%时,所述无刷直流电机的pwm预设占空比为5%~6%。
31.本发明的进一步改进在于:在步骤5中,二二导通时电流流入绕组产的转矩为正,流出绕组产生的转矩为负,则合成转矩大小为三三导通时的合成转矩大小为为了保证两种导通方式的合成矢量大小相等,调节pwm占空比,使得调节后的pwm占空比为二二导通使得倍。
32.本发明的有益效果是:1、本发明提出的无数直流电机抑制起动转矩脉动的控制方法,采用二二导通与三三导通互补结合的方式,抑制了二二导通方式下的转矩脉动,有效减弱了起动时噪声的影响。
33.2、本发明方案中根据无刷直流电机的额定转速、pwm的占空比以及极对数计算换相时间,通过改变换相时间来抑制换相时的转矩脉动,实现无刷直电机的稳定起动。
附图说明
34.图1为本发明无刷直流电机抑制起动转矩脉动控制方法的流程图。
35.图2为本发明无刷直流电机抑制起动转矩脉动控制方法的各个换相时序下三相的矢量关系图。
36.图3为本发明无刷直流电机抑制起动转矩脉动控制方法的换向电路图。
具体实施方式
37.为使本发明实施例的目的、技术方案优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.如图1-3所示,本发明提供一种无刷直流电机抑制起动转矩脉动的控制方法,具体包括如下步骤:
39.步骤s1:设置换相定时器的换向时间为预设换相时间,启动换相定时器和周期定时器;其中,无刷直流电机的预设周期值为100ms;
40.步骤s2:检测霍尔传感器各相上升沿或下降沿过零点的时刻,确定换相时序和功率开关管的导通状态;
41.本发明的无刷直流电机换相电路控制mos管导通顺序为:t1、t4
→
t1、t4、t6
→
t1、t6
→
t1、t3、t6
→
t3、t6
→
t2、t3、t6
→
t2、t3
→
t2、t3、t5
→
t2、t5
→
t2、t4、t5
→
t4、t5
→
t1、t4、t5,具体的换相控制逻辑如下:
42.当检测霍尔传感器a相上升沿过零点时,功率开关管t1、t4导通,对应的a相绕组通正电,b相绕组通负电,此时换相时序为30
°
,计算此时的换向时间为t并设置换相定时器的时间为t;
43.当检测到实时换相时间为2t时,换相定时器置零,功率开关管t1、t4、t6导通,a相绕组通正电,b相和c相绕组通负电,此时换相时序为60
°
;
44.当检测到霍尔传感器c相下降沿过零点时,功率开关t1、t6导通,对应的a相绕组通正电,c相绕组通负电,换相时序为90
°
,计算此时的换向时间为3t并设置换相定时器的时间为t;
45.当检测到实时换相时间为4t时,换相定时器置零,功率开关管t1、t3、t6导通,a相和b相绕组通正电,c相绕组通负电,此时换相时序为120
°
;
46.当检测到霍尔传感器b相上降沿过零点时,功率开关t3、t6导通,对应的b相绕组通正电,c相绕组通负电,换相时序为150
°
,计算此时的换向时间为5t并设置换相定时器的时间为t;
47.当检测到实时换相时间为6t时,换相定时器置零,功率开关管t2、t3、t6导通,b相绕组通正电,a相和c相绕组通负电,此时换相时序为180
°
;
48.当检测到霍尔传感器a相下降沿过零点时,功率开关t2、t3导通,对应的b相绕组通正电,a相绕组通负电,换相时序为210
°
,计算此时的换向时间为7t并设置换相定时器的时间为t;
49.当检测到实时换相时间为8t时,换相定时器置零,功率开关管t2、t3、t5导通,b相和c相绕组通正电,a相绕组通负电,此时换相时序为240
°
;
50.当检测到霍尔传感器c相上升沿过零点时,功率开关t2、t3导通,对应的b相绕组通正电,a相绕组通负电,换相时序为270
°
,计算此时的换向时间为9t并设置换相定时器的时间为t;
51.当检测到实时换相时间为10t时,换相定时器置零,功率开关管t2、t4、t5导通,c相绕组通正电,a相和b相绕组通负电,此时换相时序为300
°
;
52.当检测到霍尔传感器b相下降沿过零点时,功率开关t4、t5导通,对应的c相绕组通正电,b相绕组通负电,换相时序为330
°
,计算此时的换向时间为11t并设置换相定时器的时间为t;
53.当检测到实时换相时间为12t时,换相定时器置零,功率开关管t1、t4、t5导通,对应的a相和c相绕组通正电,b相绕组通负电,此时换相时序为360
°
。
54.步骤s3:计算实时换相时间,设置换相定时器设置为此时的换向时间;
55.如果所述无刷直流电机的负载小于额定负载的40%时,所述无刷直流电机的预设pwm的占空比为0~1%;如果所述负载大于40%时,所述无刷直流电机的预设pwm的占空比为5%~6%。
56.根据预设pwm的占空比、无刷直流电机的额定转速和极对数能够准确计算出无刷直流电机的换向时间,即,无刷直流电机的换向时间计算公式如下:
[0057][0058]
上述公式中,t
t
为实时换相时间的值,td为预设pwm的占空比,ne为无刷直流电机的额定转速,p为无刷直流电机的极对数。
[0059]
步骤s4:获取每步换相时对应的电角度,确定每步换相时a、b、c三相的矢量关系;
[0060]
步骤s5:改变换相时pwm占空比的大小,使得二二导通与三三导通切换前后所合成的矢量大小相同。
[0061]
如图2所示,本发明提供了各个时序下三相的矢量关系图,二二导通时电流流入绕组产的转矩为正,流出绕组产生的转矩为负,则合成转矩大小为同理,三三导通时的合成转矩大小为为了保证两种导通方式的合成矢量大小相等,调节pwm占空比,使得调节后的pwm占空比为二二导通使得倍。
[0062]
本发明通过采用将二二导通方式与三三导通方式相结合,在一个电周期内由传统的六步换相变换成十二步换相,实现通过多次换相来抑制无刷直流电机起动时所产生的转矩脉动问题,确保电机的平稳起动。
[0063]
虽然结合附图描述了本发明的实施例,但是本领域技术人员可以在不脱离本发明的精神和范围的情况下作出各种修改和变型,这样的修改和变型均落入由所附权利要求限定的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1