判断永久磁铁同步马达的初始转子位置的方法及马达装置与流程
本发明涉及永久磁铁同步马达(permanent magnet synchronous motor,pmsm,尤其涉及一种根据相电流差(phase current difference)以及线电流差(line currentdifference)来判断永久磁铁同步马达的初始转子位置的方法以及相关马达装置。
背景技术:
1、永久磁铁同步马达(为简洁起见,简称为“永磁同步马达”)由一多相定子(stator)绕组(例如一三相定子绕组)以及一转子(rotor),诸如一永久磁铁,所组成,为了节省成本以及改善稳健性,永磁同步马达通常不会安装位置传感器(例如霍尔传感器(hallsensor)),因此需要利用传统的无感测驱动方法来驱动永磁同步马达。对于传统的无感测驱动方法来说,由于永磁同步马达的初始转子位置为随机且不可知的,因此当永磁同步马达启动时,其转子可能会逆转,对于某些应用产品(例如吊扇或硬盘)来说,因为转子逆转可能会造成永磁同步马达启动过慢或减少应用产品的使用寿命,所以在这些应用产品中不允许发生转子逆转的现象,因此,极需一种用以判断永磁同步马达的初始转子位置的创新方法,其可以在永磁同步马达启动时有效地预防转子逆转。
技术实现思路
1、因此,本发明的目的之一在于提供一种根据相电流差以及线电流差来判断永磁同步马达的初始转子位置的方法以及相关马达装置,以解决上述问题。
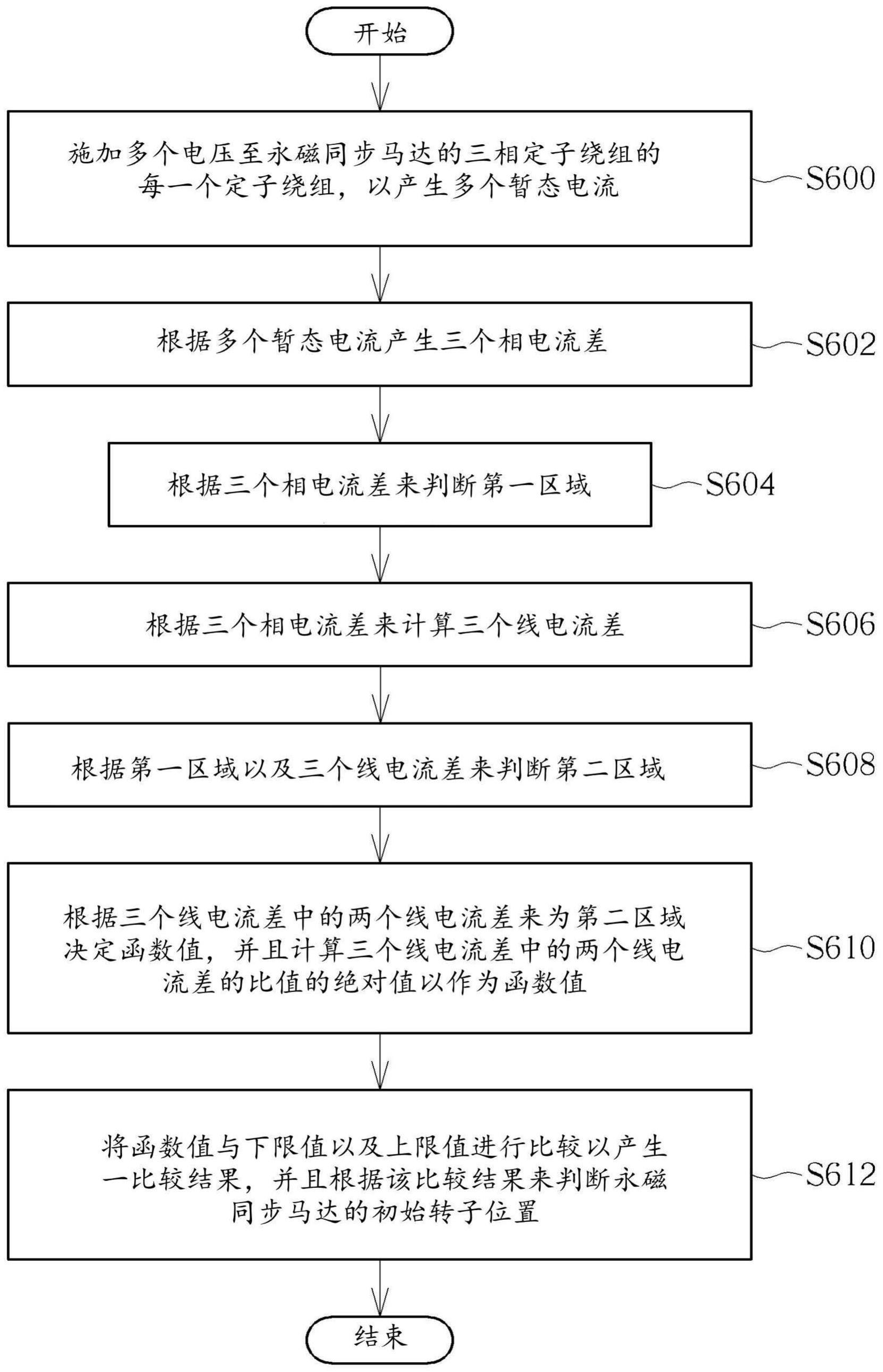
2、根据本发明的一实施例,提供了一种用以判断永磁同步马达的初始转子位置的方法。该方法可包含有:藉由将多个电压施加至永久磁铁同步马达的一三相定子绕组的每一个定子绕组来产生多个暂态电流;根据多个暂态电流来产生三个相电流差;根据三个相电流差来判断永久磁铁同步马达的初始转子位置所位于的一第一区域,其中0至360度的角度范围被划分为多个区域,以及第一区域是自多个区域中选择出来的;根据三个相电流差来计算三个线电流差;以及根据第一区域以及三个线电流差来判断永久磁铁同步马达的初始转子位置。
3、根据本发明的另一实施例,提供了一种马达装置。该马达装置可包含有一永久磁铁同步马达以及一处理电路。处理电路可用以:藉由将多个电压施加至永久磁铁同步马达的一三相定子绕组的每一个定子绕组,以自永久磁铁同步马达取得多个暂态电流;根据该多个暂态电流来产生三个相电流差;根据该三个相电流差来判断该永久磁铁同步马达的该初始转子位置所位于的一第一区域,其中0至360度的角度范围被划分为多个区域,以及该第一区域自该多个区域选择出来的;根据该三个相电流差来计算三个线电流差;以及根据该第一区域以及该三个线电流差来判断该永久磁铁同步马达的该初始转子位置。
4、本发明的好处之一是,由于永磁同步马达的初始转子位置可藉由本发明的方法来根据相电流差以及线电流差而准确地被判断,因此在永磁同步马达启动时可以有效地预防转子逆转,如此一来,不仅节省成本以及改善稳健性,同时也使永磁同步马达准时启动以及增加应用产品的使用寿命。
技术特征:
1.一种用以判断永久磁铁同步马达的初始转子位置的方法,包含有:
2.如权利要求1所述的方法,其中该三个相电流差包含有第一相电流差、第二相电流差以及第三相电流差,以及根据该三个相电流差来计算该三个线电流差的步骤包含有:
3.如权利要求1所述的方法,其中根据该第一区域以及该三个线电流差来判断该永久磁铁同步马达的该初始转子位置的步骤包含有:
4.如权利要求3所述的方法,其中该0至360度的角度范围被划分为6个区域,该第一区域为60度区域,其包含有左30度部分区域以及右30度部分区域,以及该第二区域为该左30度部分区域以及该右30度部分区域的其中之一。
5.如权利要求3所述的方法,其中根据该第二区域来判断该永久磁铁同步马达的该初始转子位置的步骤包含有:
6.如权利要求5所述的方法,其中根据该三个线电流差中的该两个线电流差来为该第二区域决定该函数值的步骤包含有:
7.如权利要求5所述的方法,其中该阈值设置包含有上限值以及下限值。
8.如权利要求7所述的方法,其中该第一区域包含有左部分区域以及右部分区域;因应该第二区域为该左部分区域,如果该函数值小于或等于该下限值,则该永久磁铁同步马达的该初始转子位置被判断为具有角度范围的上限角度,其中该角度范围对应于该第一区域的该左部分区域;如果该函数值大于该下限值并且小于或等于该上限值,则该永久磁铁同步马达的该初始转子位置被判断为具有该角度范围的该上限角度以及下限角度之间的中间角度;以及如果该函数值大于该上限值,则该永久磁铁同步马达的该初始转子位置被判断为具有该下限角度。
9.如权利要求7所述的方法,其中该第一区域包含有左部分区域以及右部分区域;因应该第二区域为该右部分区域,如果该函数值小于或等于该下限值,则该永久磁铁同步马达的该初始转子位置被判断为具有角度范围的下限角度,其中该角度范围对应于该第一区域的该右部分区域;如果该函数值大于该下限值并且小于或等于该上限值,则该永久磁铁同步马达的该初始转子位置被判断为具有该角度范围的上限角度以及该下限角度之间的中间角度;以及如果该函数值大于该上限值,则该永久磁铁同步马达的该初始转子位置被判断为具有该上限角度。
10.一种马达装置,包含有:
技术总结
一种判断永久磁铁同步马达的初始转子位置的方法及马达装置,该方法包含有:藉由将多个电压施加至永久磁铁同步马达的一三相定子绕组的每一个定子绕组来产生多个暂态电流;根据多个暂态电流来产生三个相电流差;根据三个相电流差来判断永久磁铁同步马达的初始转子位置所位于的一第一区域,其中0至360度的角度范围被划分为多个区域,以及第一区域是自多个区域中选择出来的;根据三个相电流差来计算三个线电流差;以及根据第一区域以及三个线电流差来判断永久磁铁同步马达的初始转子位置。
技术研发人员:王世杰,庄咏驿,蔡铭富
受保护的技术使用者:晶豪科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!