机载速冻绝缘皮去除装置
1.本发明涉及配电网作业设备技术领域,特别是一种线路绝缘层的去除装置。
背景技术:
2.目前,配网架空线路导线大多采用交联聚乙烯和轻型聚乙烯绝缘导线,大幅提升了线路绝缘化水平,但是与之相关的问题也随之而来,由于作业需求,通常要求带电进行绝缘导线剥皮作业,此项操作专业性强,属于高空带电作业范畴,在作业过程中操作人员需要面对诸多困难,如工器具携带难、工器具操作负荷高、高空人员自重负荷、严寒酷暑环境影响等。
3.当前电力系统中充斥着各种品牌规格的导线剥皮装置,传统的导线剥皮装置大多结构简单,包括手持绝缘杆和设置在绝缘杆顶部的剥皮器,其存在以下问题:1)作业过程中入刀深度和角度、裹握力大小以及剥皮的节奏都由作业人员来把控,受主观因素影响较大,很容易发生导线损伤;2)剥皮器主体结构大都使用金属材料制成,整体质量较大,在带电高空剥皮作业时,整体工作强度较高,严重影响作业人员的工作效率及安全性;3)手持绝缘杆为一体式整杆,长度最短也有2m以上,外出检修作业或者库房保管都极其不便,并且由于绝缘杆较长,而剥皮器剥皮过程需要力度较大,加上作业人员离剥皮位置较远,不仅工作强度大,更重要的是无法保证剥皮质量。
技术实现要素:
4.本发明需要解决的技术问题是提供一种机载速冻绝缘皮去除装置,不仅能够解决现有设备去除绝缘层导致的线芯容易受损的问题,同时也能够解决现有作业人员强度高等问题,进一步提高去除效率。
5.为解决上述技术问题,本发明所采取的技术方案如下。
6.机载速冻绝缘皮去除装置,包括设置在无人机上用于对导线绝缘皮进行冷冻处理的速冻机构和用于破碎冷冻后绝缘皮的破碎机构,所述无人机上还设置有用于协调无人机、速冻机构和破碎机构配合作业的控制器。
7.上述机载速冻绝缘皮去除装置,所述速冻机构包含液氮储存仓、固定安装在电机箱内的第一电机和设置在电机箱外的电动开合速冻仓,电动开合速冻仓包括上下相扣、并能够穿过待处理导线的上速冻仓和下速冻仓,上速冻仓和下速冻仓靠近电机箱的一侧分别固定连接一半齿型驱动齿轮,两个半齿型驱动齿轮相啮合,且其中一个半齿型驱动齿轮通过连接轴与第一电机的输出端连接,另一半齿型驱动齿轮通过销轴铰接在电机箱外壁上;所述液氮储存仓固定设置在上速冻仓的顶部且与电动开合速冻仓内腔连通。
8.上述机载速冻绝缘皮去除装置,所述上速冻仓和下速冻仓扣合形成圆柱体状,圆柱体状的电动开合速冻仓中心轴线上开设穿过导线的通孔;所述上速冻仓和下速冻仓的外壁上均设置有耐低温保护层。
9.上述机载速冻绝缘皮去除装置,所述第一电机的输出轴上设置有检测上速冻仓和
下速冻仓开合角度的角度传感器,角度传感器的输出端连接控制器的输入端,控制器的输出端连接第一电机的受控端。
10.上述机载速冻绝缘皮去除装置,所述破碎机构包括固定设置在无人机上的支撑架,支撑架上方通过固定设置的l型电机座安装有第二电机,支撑架下方设置有夹持导线并破碎导线绝缘皮的一组破碎器,破碎器通过设置在支撑架上的驱动机构完成开合操作,驱动机构与第二电机的输出端连接,第二电机的受控端连接控制器的输出端。
11.上述机载速冻绝缘皮去除装置,所述l型电机座的竖板侧面定设置有v型安装座,安装座顶端固定设置有承载板,安装座和承载板装配形成的空腔内设置有相配装的蜗轮、蜗杆,蜗杆与第二电机的输出端轴连接;承载板中部横向设置有两端通过轴承安装、并与蜗轮同轴装配的同步反向丝杆,同步反向丝杆与蜗杆相垂直;所述同步反向丝杆的左右两部分分别螺纹配装一丝杆螺母,丝杆螺母固定连接在传动杠杆的顶端,两个传动杠杆的中部均铰接在支撑架上并左右对称设置,传动杠杆底端内侧设置有破碎器,两个破碎器相对设置用于对导线绝缘皮进行破碎处理。
12.上述机载速冻绝缘皮去除装置,所述承载板的中部竖向开设有为丝杆螺母和传动杠杆提供运动空间的通孔;承载板的中部水平开设有平行于同步反向丝杆的滑槽,丝杆螺母的两端分别固定设置一与导向槽滑动配合的滑竿。
13.上述机载速冻绝缘皮去除装置,所述支撑架的底端面上向内设置有两组水平导向柱,两组水平导向柱所在平面与支撑架平行;所述破碎器顶端设置有穿过导向柱的导向孔,破碎器的外端通过连接块与传动杠杆的底端相铰接,且传动杠杆的底端竖向开设有供铰接轴运动的长条形槽孔。
14.上述机载速冻绝缘皮去除装置,所述破碎器为一底部带倒角的长方形基板,所述连接块固定设置在长方形基板的外端面上,长方形基板的内端面上分布有若干棱锥。
15.上述机载速冻绝缘皮去除装置,所述破碎器上设置有检测破碎导线绝缘皮力度的力传感器,力传感器的输出端连接控制器的输入端,控制器的输出端连接第二电机的输入端。
16.由于采用了以上技术方案,本发明所取得技术进步如下。
17.本发明利用绝缘皮的温度特性和无人机远程控制的优点设计而成,通过遥控器与控制器相互通讯来控制设备的运行状态,用来替代传统去除方式,减少了人工操作,提高了巡检效率,具有很强的实际意义和实用性。
附图说明
18.图1为本发明所述速冻机构的结构示意图;
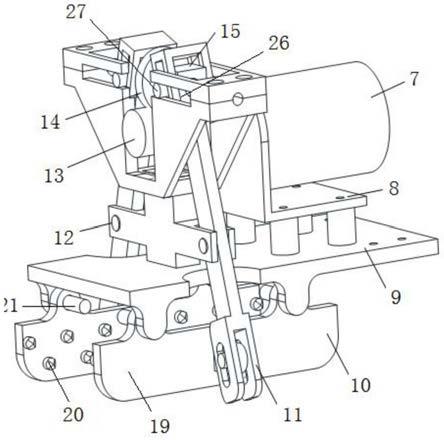
19.图2为本发明所述破碎机构的结构示意图;
20.图3为本发明所述速冻机构的正视图;
21.图4为本发明所述破碎器的示意图;
22.图5为本发明所述速冻机构的打开状态示意图;
23.图6为本发明所述速冻机构的合拢状态示意图。
24.其中:1.液氮储存仓,2.第一电机,3.角度传感器,4.下速冻仓,5.耐低温保护层,6.上速冻仓,7.第二电机,8.l型电机座,9.支撑架,10.破碎器,11.传动杠杆,12.销轴,13.
蜗杆,14.蜗轮,15.丝杆螺母,16.同步反向丝杆,17.力传感器,18.位移传感器,19.长方形基板,20.棱锥,21.导向柱,22.导向孔,23.连接块,24.铰接轴,25.长条形槽孔,26.滑槽,27.滑竿。
具体实施方式
25.下面将结合附图和具体实施例对本发明进行进一步详细说明。
26.一种机载速冻绝缘皮去除装置,包括无人机、速冻机构、破碎机构、控制器和遥控器,速冻机构和破碎机构对称安装在无人机的前后位置,控制器安装在无人机中心,控制器与遥控器相通讯;控制器在遥控器指令下控制无人机、速冻机构和破碎机构协调配合,完成飞行、导线绝缘皮的冷冻以及导线绝缘皮的破碎作业。
27.速冻机构用于对导线绝缘皮进行冷冻处理,其结构如图1、图5和图6所示,包含液氮储存仓1、固定安装在电机箱内的第一电机2和设置在电机箱外的电动开合速冻仓。
28.电动开合速冻仓包括上下相扣、并能够穿过待处理导线的上速冻仓6和下速冻仓4,上速冻仓6和下速冻仓4靠近电机箱的一侧分别固定连接一半齿型驱动齿轮,两个半齿型驱动齿轮相啮合,且其中一个半齿型驱动齿轮通过连接轴与第一电机的输出端连接,另一半齿型驱动齿轮通过销轴铰接在电机箱外壁上。
29.液氮储存仓1固定设置在上速冻仓的顶部,且与电动开合速冻仓内腔连通,液氮储存仓内存储有液氮,用于冷冻电动开合速冻仓包括的导线绝缘皮。
30.本实施例中,上速冻仓6和下速冻仓4扣合形成圆柱体状结构,圆柱体状的电动开合速冻仓中心轴线上开设穿过导线的通孔;如图1和图6所示。
31.为保持电动开合速冻仓内部液氮的温度,本发明在上速冻仓6和下速冻仓4的外壁上均设置了耐低温保护层5。
32.为能够准确掌握上速冻仓6和下速冻仓4的开合角度,在第一电机2的输出轴上设置了角度传感器3,角度传感器3的输出端连接控制器的输入端,控制器的输出端连接第一电机的受控端,控制器根据角度传感器检测的结果控制上速冻仓6和下速冻仓4的开合。
33.破碎机构用于破碎冷冻后的绝缘皮,其结构如图2至图4所示,包括固定设置在无人机上的支撑架9,支撑架9上方通过固定设置的l型电机座8安装有第二电机7,支撑架9下方设置有一组破碎器10,用于夹持导线并破碎导线绝缘皮;破碎器10通过设置在支撑架上的驱动机构完成开合操作,驱动机构与第二电机的输出端连接,第二电机的受控端连接控制器的输出端。
34.本发明中,驱动机构包括蜗轮14、蜗杆13、同步反向丝杆16、丝杆螺母15和传动杠杆11。
35.l型电机座8竖板侧面定设置有v型安装座,安装座顶端固定设置有承载板,相配装的蜗轮14、蜗杆13设置在安装座和承载板装配形成的空腔内,蜗杆13与第二电机7的输出端轴连接。
36.同步反向丝杆16的两端通过轴承横向设置在承载板中部,且同步反向丝杆16与蜗杆13相垂直;同步反向丝杆16两侧螺纹一为右旋、一为左旋,蜗轮14安装在同步反向丝杆16的中间位置,后续传动左右对称布置。
37.同步反向丝杆16的左右两部分分别螺纹配装一丝杆螺母15,丝杆螺母15滑动连接
在传动杠杆11的顶端,两个传动杠杆11的中部均铰接在支撑架上,并左右对称设置,传动杠杆11底端内侧设置有破碎器10,两个破碎器相对设置用于对导线绝缘皮进行破碎处理。
38.承载板的中部竖向开设有上下贯通的通孔,如图2所示,用于为丝杆螺母15和传动杠杆11提供运动空间;承载板的中部水平开设有前后贯通的滑槽26,滑槽与同步反向丝杆16同平面,丝杆螺母15的两端分别固定设置一与导向槽滑动配合的滑竿27。
39.传动杠杆11的顶端竖向开设有四面连通的长条形槽孔,丝杆螺母15位于槽孔中心,滑竿27穿过前后两侧的长条形槽孔后伸入到承载板的滑槽中。
40.支撑架9的底端面上向内设置有两组水平导向柱21,两组水平导向柱所在平面与支撑架平行,本实施例中一组包含两根水平导向柱;相应的,破碎器顶端设置有穿过导向柱的导向孔22,通过导向柱和导向孔的配合,对破碎器的运动进行导向。
41.破碎器的外端通过连接块23与传动杠杆11的底端相铰接,且传动杠杆的底端竖向开设有供铰接轴24运动的长条形槽孔25,如图2和图3所示。
42.破碎器10为一底部带倒角的长方形基板19,如图4所示,上述连接块23固定设置在长方形基板的外端面上,长方形基板的内端面上分布有若干棱锥20,两破碎器相对时对导线绝缘皮进行破碎。本实施例中,长方形基板上的棱锥成行布置,且上下相邻行之间的棱锥交错分布,交错的棱锥的刃缘延伸在一条线上,对称分布的破碎器10上棱锥是对应的。
43.本发明中,当两个破碎器相向运动到棱锥与导线绝缘皮接触时,传动杠杆应运动到与水平面相垂直的状态,为导线绝缘皮提供较大的水平破碎力。
44.本发明在水平导向柱上设置了位移传感器18,用于感应破碎器的行程;破碎器10上还设置有力传感器17,用于检测破碎导线绝缘皮的力度;力传感器17和位移传感器18的输出端分别连接控制器的输入端,控制器的输出端连接第二电机的输入端。
45.当破碎器向导线移动到一定位置(破碎器上棱锥未接触导线芯)时,位移传感器反馈至控制器,控制器控制第二电机反转,破碎器水平外移,完成第一次破碎过程;同时,通过力传感器来感应棱锥端部接触导线的部位,当棱锥与绝缘皮接触时,由于绝缘皮被冷冻,其组织发生了变化,相对于导线芯来说硬度低很多,此时力传感器采集到的力值较小,当棱锥继续向导线移动,接触到导线芯时,力传感器测得的力值突然增加,此时控制器会控制第二电机反转,使破碎器返回。
46.控制器控制无人机向前或向后移动小于两棱锥水平距离的位置,继续控制第二电机动作,进行第二次破碎过程。直到力传感器感应到施加载荷突然衰减时(绝缘皮破碎的瞬间),控制器控制第二电机反转,使破碎器返回原位。
47.本发明的工作原理如下所述。
48.对导线进行破碎前,先在地面预先将液氮装入液氮储存仓,而后通过遥控器与控制器配合,控制无人机、速冻机构和破碎机构协调作业完成绝缘皮的去除工作。
49.无人机飞起停落在导线上,此时电动开合速冻仓是张开状态,如图5所示,通过遥控器向控制器发出指令,控制速冻仓闭合,上速冻仓与下速冻仓开始合拢至两仓对齐,将导线包裹住,如图6所示,此时角度传感器反馈至控制器,控制器给第一电机断电停止;控制器控制含液氮储存仓底部的阀门打开,使液氮从液氮储存仓进入电动开合速冻仓,速冻一定时间,电动开合速冻仓从合拢转为张开状态,角度传感器将角度信息反馈至控制器,第一电机断电停止,无人机携带装置在导线上行走。
50.当破碎机构行走至速冻机构冷却后的导线位置后,无人机停止行走,第二电机启动,经过蜗轮蜗杆、丝杆螺母、传动杠杆传递到破碎器,破碎器水平向中间移动,对导线施加载荷,直到绝缘皮破碎完成。
51.破碎器移动到初始状态,无人机飞离导线,导线绝缘皮去除作业完成。
52.本发明通过无人机搭载速冻机构和破碎机构,并通过遥控器控制来实现导线绝缘的去除作业,大大减轻了作业人员的劳动强度,提高了工作效率;并且在破碎过程中,能够完全破碎绝缘皮的基础上,可靠保证了导线芯的完好,避免导线芯受损。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1