一种高速永磁同步电机的无传感器角度补偿方法
1.本发明涉及永磁同步电机控制技术领域,具体涉及一种高速永磁同步电机的无传感器角度补偿方法。
背景技术:
2.基于无传感器的高速永磁同步电机具有可靠性高和效率高的优势,在众多领域得到广泛应用,例如高速的压缩机、吹风机、吸尘器、牙钻等。
3.永磁同步电机在高速状态下进行foc角度估算时,存在一定估算时间,等估算结束其与实际值相比已产生偏移,高速时的角度偏移则更为严重,最终造成foc控制不准确,影响整体控制。因此在高速状态下的永磁同步电机角度补偿研究至关重要。传统的补偿方式只有在永磁同步电机运行效率低于预期时采取采用角度补偿,常见方法的在电机进入特定的功率段、速度段时,采用分段式的固定角度补偿。然而,这些传统的方法并没有考虑电机速度的可变性,如果速度下降导致当前的补偿值误差过大,会使得无传感器的高速永磁同步电机运行效果进一步降低。
4.本发明提供通过foc运算周期、foc运算耗时、电机转速信息来指定无传感器角度补偿,可以在不同速度情况下实现自主的角度补偿。
技术实现要素:
5.本发明提供了一种高速永磁同步电机的无传感器角度补偿方法,以解决现有技术中传统的高速永磁同步电机角度偏移、速度估算不准确的问题。
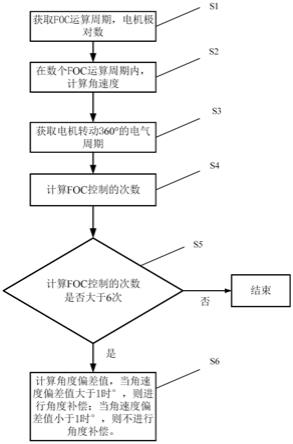
6.本发明提供了一种高速永磁同步电机的无传感器角度补偿方法,包括:
7.步骤1:获取foc运算周期、电机极对数,获取一个foc运算周期中foc运算耗时;
8.步骤2:根据当前电机转速在数个foc运算周期内,计算角速度;
9.步骤3:根据角速度获取电机转动360
°
的电气周期;
10.步骤4:根据电气周期、foc运算周期,计算foc控制的次数;
11.步骤5:当foc控制次数大于6次时,执行步骤6;当foc控制次数不大于6次时,结束当前角度补偿过程;
12.步骤6:计算角度偏差值,当角速度偏差值大于1时
°
,则进行角度补偿;当角速度偏差值小于1时
°
,则不进行角度补偿。
13.可选地,所述步骤2中数个foc运算周期的确定方式具体为:
[0014][0015]
其中,w为foc运算周期的个数,n为当前电机转速,p为电机极对数。
[0016]
可选地,所述步骤3中电气周期t2的计算公式为:
[0017][0018]
其中,ω为角速度。
[0019]
可选地,所述步骤4中计算foc控制次数k的公式为:
[0020][0021]
可选地,所述步骤5中当foc控制次数不大于6次时,结束当前角度补偿过程,并将foc控制切换至无传感器的方波控制模式。
[0022]
可选地,所述步骤6中角度偏差值h计算公式为:
[0023][0024]
其中,t
cost
为foc运算耗时。
[0025]
本发明的有益效果:
[0026]
1.本发明基于角度补偿算法,不仅不增加原有的硬件电路,还不多占用控制器引脚,在角度补偿过程中随着电机转速的变化可以灵活补偿,提高了foc控制的准确性。
[0027]
2.本发明相比于传统的高速永磁同步电机的无传感器角度补偿方法,先纠正了角速度更新不准确、角度补偿固定等弊端,且具有适用范围广、考虑电机速度可变性等优势。
附图说明
[0028]
通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,在附图中:
[0029]
图1为本发明具体实施的方法流程图。
具体实施方式
[0030]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0031]
本发明实施例中,永磁同步电机为1对极,额定转速160000转/分,载波频率为20khz。
[0032]
本发明实施例中,提供一种高速永磁同步电机的无传感器角度补偿方法,包括:
[0033]
步骤s1:获取foc运算周期、电机极对数,获取一个foc运算周期中foc运算耗时;
[0034]
foc运算周期t1:
[0035]
foc运算耗时根据foc实际算法所耗费的指令周期来确定。
[0036]
步骤s2:根据当前电机转速在数个foc运算周期内,计算角速度;
[0037]
若当前电机转速n为120000转/分,则数个(w)foc运算周期确定方法为:
[0038][0039]
其中,公式采用的方法是角度累计变化180
°
,多需要经历的foc运算周期数作为计算角速度的运算周期标准。“[]”表示取整函数。
[0040]
之所以在数个foc运算周期内,计算角速度是为了不同转速条件下角速度的计算精度。
[0041]
步骤s3:根据角速度获取电机转动360
°
的电气周期;
[0042]
电气周期t2的计算公式为:
[0043][0044]
步骤s4:根据电气周期、foc运算周期,计算foc控制的次数k:
[0045][0046]
步骤s5:当foc控制次数大于6次时,执行步骤s6;当foc控制次数不大于6次时,结束当前角度补偿过程;
[0047]
foc控制次数大于6次时说明是foc控制有效的。当foc控制次数不大于6次时,foc控制是无效或者控制已经等于方波控制,所以将foc控制切换至无传感器的方波控制模式。
[0048]
步骤s6:计算角度偏差值,当角速度偏差值大于1时
°
,则进行角度补偿;当角速度偏差值小于1时
°
,则不进行角度补偿。
[0049]
foc运算耗时为25μs,角度补偿计算方法为:
[0050][0051]
由于18
°
大于1
°
所以需要补偿。
[0052]
本发明的原理所依托的是:以当前信息使用包含角度观测器的foc估算角度时,角度估算完成时,由于foc运算耗时原因电机的角度又产生了变化,导致刚估算出的角度不匹配真实角度。如果不补偿就会导致电机效率的下降,在高速电机上的影响尤为明显。所以根据foc运算周期、foc运算耗时、电机转速信息信息来实现角度的精确补偿。
[0053]
传统方法是以电机效率是否达标来衡量角度补偿的有效性,而不是电机效率最优来衡量。采用本发明的方法可实现角度的精确补偿,从而实现电机效率最优。
[0054]
虽然结合附图描述了本发明的实施例,但是本领域技术人员可以在不脱离本发明的精神和范围的情况下作出各种修改和变型,这样的修改和变型均落入由所附权利要求所限定的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1