基于地球大气储能的能量收集系统、方法及储能装置与流程
1.本发明涉及储能技术领域,具体地,涉及一种基于地球大气储能的能量收集系统、方法及储能装置。
背景技术:
2.能量存在的形式多种多样,按照物质的不同运动形式分类,能量可分为核能、机械能、化学能、热能、电能、辐射能、光能等,但能量的收集储存并能够灵活应用非常关键,尤其是自然界和人类活动中存在诸多稳定或非稳定的能量,例如海水潮汐、海浪拍岸、高空坠物、弹簧反弹、气体膨胀、炸药/核能爆破,风车、水利或太阳能发电、人走路踩踏地面、汽车路面行驶、机电系统能量、振动冲击能量、声音能量、热能等等,这些能量都伴随着一种瞬时的或变动的能量的聚集和耗散,往往会通过介质传导、摩擦、动势能转化、热能转换或辐射等方式传导掉或耗散掉,导致的运动或能量往往无法控制和收集而不能被利用或难以利用。
3.即使出现的一些能量收集的设备,也受到外界环境的限制使用过程中大多具有一定的局限性,或者结构复杂,或者能量储存和释放不方便,等等,大大限制了能量的储存与释放的实施。
4.专利文献cn101445202b公开了一种运动机械能储存与释放装置,尤其是一种利用平面蜗卷弹簧储存能量以实现平滑释放的节能提升装置。它包括机座、电动机、减速箱、由卷筒钢绳带动的载物箱、驱动卷筒转动并由卷筒分为左右两段的主动轴,其中一段通过离合器与减速箱连接,另一段通过若干个离合器并联若干个内设平面蜗卷弹簧的储能装置。储能装置包括从动轴、平面蜗卷弹簧等,从动轴为空心轴,主动轴从中通过,从动轴的输入端和主动轴通过离合器连接,当该离合器合上后,从动轴和主动轴同步转动,储能装置就能在载物箱下降或上升时进行储能或释能,但该设计需要依靠运动过程中的高度的特殊性实现,不具有通用性。再如专利文献cn202613304u公开了一种太阳光直接储存和释放装置,包括自动跟踪聚光系统,引入光纤、真空环形管,光开关、引出光纤和光释放装置,引入光纤一端与自动跟踪聚光系统连接、另一端与真空环形管的光入口连接,将自动跟踪聚光系统聚焦的白天的太阳光引入到真空环形管内,太阳光在真空环形管内一直循环运行,引出光纤一端与真空环形管的光出口连接、另一端与光释放装置连接,光开关设置于引出光纤上,当要使用真空环形管内一直循环运行的太阳光照明时打开光开关,使部分太阳光通过引出光纤进入光释放装置,照射到需要的场合,但该设计受到天气的制约,对于阴雨天气不利于能量的收集,不具有通用性。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种基于地球大气储能的能量收集系统、方法及储能装置。
6.根据本发明提供的一种基于地球大气储能的能量收集系统,包括:
7.储能壳体,提供储能的载体;
8.传动部件,具有密封端且所述密封端可滑动的布置在所述储能壳体的内部并与所述储能壳体之间形成密闭空间;
9.动力源,能够驱使所述密封端在储能壳体的第一位置向第二位置运动并能够使所述密闭空间的内部形成真空;
10.锁定组件,使得所述传动部件具有锁定和解锁两种状态,当所述传动部件处于所述解锁状态时在地球大气的作用下所述密封端能够从朝向第二位置到第一位置的方向运动进而使得所述密闭空间中的负压能被释放,其中,所述锁定组件动作的执行能够采用如下任一种方式:
11.人工控制;
12.程序控制且所述程序能够被设定进而使得所述锁定组件在预设的时间点或时间段以连续或非连续的状态被执行,或者所述锁定组件基于条件信息被执行;
13.人工控制与程序控制相结合。
14.优选地,所述动力源能够采用风能、太阳能、化学能、热能、电能、辐射能、核能、动能、势能、生物能、潮汐能、磁和电磁能、物理相变能中的任一种或任多种形式。
15.优选地,所述传动部件具有输出端;
16.由于所述密封端被推动、由于所述输出端被拉动或者由于被推动和被拉动的组合进而使得所述密封端从第一位置运动到第二位置。
17.优选地,所述输出端延伸到所述储能壳体的外部。
18.优选地,所述密闭空间内的真空环境由于所述密封端运动形成和/或者通过抽真空的方式形成。
19.优选地,沿从第二位置到第一位置的方向上所述密封端包括依次间隔套装在所述传动部件上并与所述储能壳体相匹配的第一活塞体、第二活塞体以及布置在所述第一活塞体和第二活塞体之间的柔性体,当所述密闭空间中处于负压状态时,所述柔性体的部分在大气压力的作用下被挤压至所述第二活塞体和储能壳体之间的间隙中进而实现所述密闭空间的密封。
20.优选地,一个所述第一活塞体、第二活塞体、柔性体形成一组密封组件;
21.所述传动部件上的密封组件能够被配置为一组或多组。
22.优选地,所述锁定组件采用卡扣锁定、孔销式锁定、电磁力锁定、热膨胀锁定、结构干涉锁定、气压液压锁定、棘轮机构锁定、胶结锁定、反作用力锁定、焊接锁定中的任一种形式。
23.优选地,所述传动部件在锁定状态或解锁状态时均允许所述传动部件从第一位置向第二位置的方向运动。
24.优选地,所述储能壳体中具有锥形空间且所述锥形空间的小口端朝向所述密闭空间,所述锁定组件包括触发体、锁紧支件以及势能存储部件;
25.所述势能存储部件的一端连接所述储能壳体并布置在所述锥形空间的大口端,势能存储部件的另一端连接所述锁紧支件,所述传动部件穿过所述锥形空间且所述锁紧支件、势能存储部件均沿所述传动部件的周向布置;
26.当操作所述触发体时能够驱使锁紧支件朝向所述大口端运动进而使得所述传动
部件处于解锁状态;当不操作所述触发体时所述势能存储部件在自身弹力的作用想能够驱使所述锁紧支件朝向所述小口端运动进而使得所述传动部件处于锁定状态。
27.优选地,所述传动部件具有锁定状态和解锁状态之间的第三状态,其中,所述第三状态能够在负压能被释放的过程中维持所述传动部件匀速运动、加速运动或减速运动。
28.优选地,所述动力源包括如下任一种结构组合形式:
29.流体输送泵,用于所述密闭空间的抽真空以及充气;
30.流体输运泵以及电动机,所述流体输运泵用于抽真空,所述电动机能够在所述传动部件的驱使下发电;
31.流体输运泵,用于抽真空;
32.电动机,能够驱使所述密封端从第一位置向第二位置运动且具有发电功能或者所示电动机仅具有发电功能。
33.优选地,所述密闭空间中设置有第一弹簧,所述第一弹簧的一端连接所述密封端,另一端连接所述储能壳体,其中,所述第一弹簧始终处于压缩状态。
34.优选地,包括控制机构,所述控制机构分别信号连接所述动力源、锁定组件进而实现以设定方式释放所述负压能或者补充所述负压能。
35.根据本发明提供的一种储能装置,包括多个串联布置或并联布置的基于地球大气储能的能量收集系统。
36.优选地,不同的基于地球大气储能的能量收集系统中采用如下任一种或任多种实施形式:
37.各自的传动部件具有相同、部分相同或完全不同的高度和/或朝向;
38.各自的传动部件具有相同、部分相同或完全不同的结构;
39.各自的传动部件具有相同、部分相同或完全不同的状态,所述状态为所述传动部件在第一位置和第二位置之间的位置状态;
40.各自的锁定组件具有相同、部分相同或完全不同的结构;
41.各自的动力源采用相同、部分相同或完全不同的形式。
42.根据本发明提供的一种基于地球大气储能的能量收集方法,包括如下步骤:
43.s1:外部能量一次或多次作用在传动部件上使得传动部件所具有的密封端朝第一方向产生位移进而使得所述密封端与承载所述密封端的储能壳体之间的密闭空间变大,且由于传动部件上具有的锁定组件进而不允许所述密封端朝向第二方向运动,其中,密闭空间为负压空间,第一方向与第二方向的方向相反;
44.s2:解锁所述锁定组件时,在地球大气的作用下所述密封端朝向第二方向运动。
45.优选地,所述密封端在所述储能壳体中能够在第一位置和第二位置之间运动,从第一位置向第二位置运动的方向为第一方向,其中:
46.当所述密封端位于所述第一位置和第二位置之间时,所述s1、s2依次执行或交替执行;
47.当所述密封端位于所述第一位置时,所述s1、s2依次执行;
48.当所述密封端位于所述第二位置时,先执行s2再执行s1。
49.与现有技术相比,本发明具有如下的有益效果:
50.1、本发明通过采用处于真空状态的密闭腔室实现系统的真空储能,借助地球大气
与密闭腔室之间产生的压力差产生驱动力,相当于地球大气与真空腔室之间存储大气势能,并能够根据需要随时将密闭腔室内的负压在压力差驱动力的作用下释放或转化,能量储存和释放受到外部环境影响小,不产生其他的垃圾,环境友好度好,灵活性强,普适性强,具有推广的实际价值和意义。
51.2、本发明可仅通过一个负压泵即可实现系统的真空储能,并能够根据需要随时将释放,结构简单,易于实现,成本低。
52.3、本发明制造过程中均采用常规的材料制作,且部件少,成本低。
53.4、本发明操作方便,可通过控制系统实现自动化和远程管理。
54.5、本发明中的储能系统具有高安全性的特点,不存在爆炸或其他的危险。
55.6、本发明具有低噪音的特点。
56.7、本发明在能量释放过程中具有更加稳定的能量释放性能,相比其他储能具有更加稳定的能量释放优势。
57.8、本发明通过进一步的改进可作为为定点使用或制作为便携式的储能设备,更具有使用的广度。
58.9、本发明中的系统或装置可进行灵活设计,根据实际的应用场景设计其体积和重量,实用性强。
59.10、本发明能够将非稳定运动或能量,或者将微小/短程能量,或短时/瞬态能量进行转化蓄积、或转化累积,并存储和控制,并根据输入运动和能量产生的需求而控制存储能量的释放,形成期望的稳定可控的物体运动或稳定形式供给的能量,解决了长期以来非稳定状态能量难以收集的问题。
附图说明
60.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
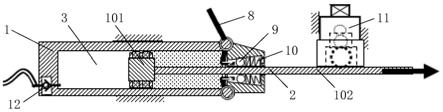
61.图1为本发明的结构示意图;
62.图2为密封端的结构示意图;
63.图3为密闭空间被抽成真空时密封端的结构示意图;
64.图4为具有第一弹簧时密封端处于第二位置且密闭空间未被抽成真空时的结构示意图;
65.图5为具有第一弹簧时密封端处于第二位置且密闭空间被抽成真空时的结构示意图;
66.图6为具有第一弹簧时密封端处于第一位置时的结构示意图;
67.图7为具有第一弹簧时密封端从第一位置向第二位置运动过程中的结构示意图;
68.图8为储能装置中多个基于地球大气储能的能量收集系统并联布置时的结构示意图,其中,密闭空间中未被抽为真空;
69.图9为储能装置中多个基于地球大气储能的能量收集系统并联布置时的结构示意图,其中,密闭空间中被抽为真空;
70.图10为储能装置中多个基于地球大气储能的能量收集系统并联布置时的结构示意图,其中,密闭空间中被抽为真空且部分系统已将负压能转化为其他形式的能量;
71.图11为储能装置中多个基于地球大气储能的能量收集系统串联布置时的结构示意图,其中,传动部件的朝向一致、高度部分一致;
72.图12为储能装置中多个基于地球大气储能的能量收集系统串联布置时的结构示意图,其中,传动部件的朝向、高度均部分一致;
73.图13为能量收集系统中不稳定能量收集的结构示意图,其中,能量未收集时的状态;
74.图14为能量收集系统中不稳定能量收集的结构示意图,其中,能量收集时的状态;
75.图15为储能装置中不稳定能量收集的结构示意图,其中,能量收集时的状态;
76.图16为能量收集系统不稳定能量收集的结构示意图,其中,能量未收集时的状态,传动框具有自动复位的功能;
77.图17为能量收集系统不稳定能量收集的结构示意图,其中,能量收集时的状态,传动框具有自动复位的功能;
78.图18为能量收集系统不稳定能量收集的结构示意图,其中,能量收集完成时传动框正在复位时的结构示意图;
79.图19为能量收集系统控制原理示意图;
80.图20为能量收集系统大气储能的原理示意图;
81.图21为实施例2中密封端的结构示意图,其中,电磁体未通电;
82.图22为实施例2中密封端的结构示意图,其中,电磁体已通电;
83.图23为实施例2中密封端的结构示意图,其中,储能壳体的内壁设置有密封凹槽;
84.图24为实施例3中密封端的结构示意图,其中,第一囊体未加热;
85.图25为实施例3中密封端的结构示意图,其中,第一囊体已加热;
86.图26为实施例4中锁定组件的结构示意图,其中,第二囊体中的两种相变材料均未加热;
87.图27为实施例4中锁定组件的结构示意图,其中,第二囊体中的两种相变材料均已加热;
88.图28为实施例4中锁定组件的结构示意图,其中,第二囊体中的两种相变材料均已降温;
89.图29为实施例5中棘轮机构锁定的结构示意图。
90.图中示出:
91.储能壳体1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二永磁体21
92.传动部件2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一电磁体22
93.密闭空间3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二电磁体23
94.第一活塞体4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
密封凹槽24
95.第二活塞体5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一囊体25
96.柔性体6
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二囊体26
97.第一弹簧7
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
石蜡27
98.触发体8
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
锡铋合金28
99.滚动体9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
锁定挡块29
100.第二弹簧10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
锁定槽30
101.电动机11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一运动块31
102.第一阀门12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二运动块32
103.第二阀门13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
阻挡齿33
104.第三阀门14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
容纳空间34
105.第四阀门15
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
锁定结构体35
106.共用腔室16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三弹簧36
107.传动杆17
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
解锁功能件37
108.传动框18
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
固定轴38
109.能量体19
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
密封端101
110.第一永磁体20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输出端102
具体实施方式
111.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
112.实施例1:
113.本发明提供了一种基于地球大气储能的能量收集系统,包括储能壳体1、传动部件2、动力源以及锁定组件,其中,储能壳体1提供储能的载体;传动部件2具有密封端101且所述密封端101可运动的布置在所述储能壳体1的内部或外部并与所述储能壳体1之间形成密闭空间3;动力源能够驱使所述密封端101在储能壳体1的第一位置向第二位置运动并能够使所述密闭空间3的内部形成真空;锁定组件使得所述传动部件2具有锁定和解锁两种状态,当所述传动部件2处于所述解锁状态时在地球大气的作用下所述密封端101能够从朝向第二位置到第一位置的方向运动进而使得所述密闭空间3中的负压能被释放,其中,所述锁定组件动作的执行能够采用如下任一种方式:
114.人工控制,人工直接控制锁定组件,通过人工将锁定组件调节至锁定状态或解锁状态;
115.程序控制且所述程序能够被设定进而使得所述锁定组件在预设的时间点或时间段以连续或非连续的状态被执行,或者所述锁定组件基于条件信息被执行,进而匹配能量释放的需求,满足产品的需求,条件信息可理解为基于触发信号致使所述锁定组件的状态被改变,例如,某传感器获得传感压力已到达设定阈值,传感器的压力信号触发程序控制锁定组件动作执行并从锁定状态进入解锁状态进而使得负压能被释放,而负压能释放后能够将传感压力值进行调节进而实现系统的稳定;
116.进一步地,本发明中还可以采用人工控制与程序控制相结合的方式实现锁定组件的调控。
117.需要指出的是,密封端101布置在储能壳体1外部的情形如采用波纹管套装在储能壳体1的外部,波纹管与储能壳体1内部形成密闭空间,且在波纹管伸缩运动时实现能量储存和释放。
118.本发明通过将密闭腔室置于真空状态实现系统的真空储能,且能够由于地球大气
与密闭腔室之间存在压力差进而产生驱动力从而实现传动部件2的运动,从而实现能量的释放或转化,相当于将能量(各种动能)存储于大气中,变为大气压势能(动能转化为势能,并且大气层为势能转化介质的空间,无处不在,只要有空间就可以被利用和进行势能存储,没有方向和位置限制,可用的介质和空间也相对无限大),并能够根据需要随时将密闭空间3内的负压能在大气压力的作用下释放,能量储存和释放受到外部环境影响小,不产生其他的垃圾和环境污染,环境友好度好,灵活性好,能够应用于多种工况,普适性强,具有推广的实际价值和意义。
119.需要说明的是,本发明中的第一位置为密封端101的初始位置,密封端101处于第一位置时密闭空间3的体积最小,第二位置为密封端101朝向远离第一位置运动最大位移时的位置,密封端101处于第二位置时密闭空间3的体积最大,其中,对于体积最大、体积最小的理解对于不同的结构和应用环境并不相同,例如在图1和图6中两种结构中的第一位置并不相同,图1中密封端101处于第一位置时密闭空间3的体积为0或接近于0,而图6中由于第一弹簧7的存在使得密封端101处于第一位置时密闭空间3的体积仍然大于0,因此,应根据实际的产品合理理解本发明中的第一位置和第二位置。
120.在实际应用中,密闭空间3内的真空环境由于所述密封端101运动形成或者通过抽真空的方式形成,如图1所示,当将密闭空间处于密封状态时直接将密封端101向右推动或拉动密闭空间即可形成真空;或者,密闭空间3在与外界大气相连通的情况下先将密封端101向右推动或拉动后再将密闭空间3与外界大气隔开后对密闭空间3抽真空,或者抽真空与拉动/推动形成真空复合作用,使真空形成效率或真空度更高,都能将密闭空间3内处理为真空状态,具体在实际应用中应根据具体的应用场景灵活选择。
121.进一步地,所述传动部件2具有输出端102;在系统能量的收集过程中,由于所述密封端101被推动、由于所述输出端102被拉动或者由于密封端101被推动和输出端102被拉动的组合进而都能使得所述密封端101从第一位置运动到第二位置,其中,在此过程中被推动或被拉动的力均来自动力源。
122.在本发明中,动力源应进行广泛理解,在某些实施例中可以仅仅作为本发明储能的能量来源,也可以不仅作为本发明储能的能量来源,而且在本发明中的系统负压能释放时扮演能量转化的角色,例如动力源包括发电机,在负压能释放的同时通过发电机将负压能转化为电能应用,因此,本发明中的动力源具有多种可实施的结构或结构的组合,应根据不同的应用场景进行配置。
123.进一步地,本发明中的动力源能够采用多种能量形式以实现负压能的存储,例如风能(利用风力产生能量)、太阳能(利用太阳能如太阳能板、太阳光照等产生能量)、化学能(利用化学反应产生能量,例如燃烧、爆炸等产生的能量)、热能(例如燃烧热、电磁涡流热、电阻热、地热能等)、电能、辐射能(电磁波中电场能量和磁场能量的总和)、核能、动能(由于作机械运动、惯性运动而具有的能)、势能(如引力势能、弹性势能等)、生物能(动物机体运动、动植物伸缩、微生物等产生的能量,如厌氧发酵等)、潮汐能(海水周期性涨落运动中所具有的能量,其水位差表现为势能,其潮流的速度表现为动能)、磁和电磁能(由于磁场、电磁场等产生的能量)、物理相变能(由于物质的相变,尤其是固体到液体到气体膨胀过程中产生的能量)中的任一种或任多种形式的组合。
124.在实际应用中,输出端102可以被设置为储能壳体1的内部或表面,也可以被设置
为储能壳体1的外部,输出端102优选延伸到所述储能壳体1的外部,并连接其他的结构,适于外部能量的推动、拉动等,具体应根据实际的应用场景灵活选择。
125.具体地,锁定组件能够采用多种实施形式,如卡扣锁定、孔销式锁定(孔与柱销配合实现锁定和解锁,锁定时柱销插入孔内,解锁时柱销从孔中拔出)、电磁力锁定(依靠电磁感应产生的磁场力实现锁定)、热膨胀锁定、结构干涉锁定、棘轮机构锁定、气压液压锁定(依靠气动压力或液压压力实现锁定力)、胶结锁定(依靠强力胶实现胶粘锁定)、反作用力锁定、焊接锁定(通过直接焊接的方式实现锁定,解锁时再将焊接处破坏)中的任一种形式。下面通过结构干涉锁定的一种结构形式介绍本发明。
126.具体地,储能壳体1中具有锥形空间且所述锥形空间的小口端朝向所述密闭空间3,所述锁定组件包括触发体8、锁紧支件以及势能存储部件,所述势能存储部件的一端连接所述储能壳体1并布置在所述锥形空间的大口端,势能存储部件的另一端连接所述锁紧支件,所述传动部件2穿过所述锥形空间且所述锁紧支件、势能存储部件均沿所述传动部件2的周向布置;当操作所述触发体8时能够驱使锁紧支件朝向所述大口端运动进而使得所述传动部件2处于解锁状态;当不操作所述触发体8时所述势能存储部件在自身弹力的作用下能够驱使所述锁紧支件朝向所述小口端运动进而使得所述传动部件2处于锁定状态。
127.如图1所示,本实施例中的触发体8优选采用驱动杆,锁紧支件优选采用滚动体9,例如钢珠,势能存储部件优选采用第二弹簧10,第二弹簧10的一端连接储能壳体1并朝向锥形空间的大口端,第二弹簧10的另一端连接滚动体9,传动部件2穿过锥形空间且滚动体9、第二弹簧10均沿传动部件2的周向布置。
128.进一步地,驱动杆可转动的安装在储能壳体1上且一端延伸到储能壳体1的外部作为操作的执行端,另一端接触滚动体9,当外力按压驱动杆的执行端时能够使得另一端驱使滚动体9朝向大口端运动,此时,滚动体9与传动部件2之间的摩擦力变小进而使得传动部件2解锁而处于解锁状态;当撤去驱动杆的执行端的外力时第二弹簧10自身被压缩的状态存在回复力,自身伸长进而驱使滚动体9朝向小口端运动并将传动部件2挤紧,滚动体9与传动部件2之间的摩擦力变大使得传动部件2又回到锁定状态。
129.滚动体9优选为钢球,钢球与传动部件2之间具有一定的摩擦力,当密封端101朝向第一位置运动时钢球的位置跟随传动部件2发生微小的移动或仅存在运动的趋势进而能够将传动部件2挤紧从而锁定传动部件2,当密封端101朝向第二位置运动时钢球的位置跟随传动部件2发生微小的移动或仅存在运动的趋势进而使得钢球和传动部件2之间产生间隙,传动部件2被锁定的状态解除,通过该锁定的结构实现了解锁和锁定间的精密控制。
130.本实施例中,传动部件2在锁定状态或解锁状态时均允许所述传动部件2从第一位置向第二位置的方向运动。在传动部件2从第一位置向第二位置运动时由于传动部件2与滚动体9之间存在摩擦力可带动滚动体9运动或产生运动的趋势进而使得滚动体9产生图1中向右运动的趋势或向右运动的位移,进而使得传动部件2与滚动体9之间的摩擦力变小而使的传动部件2解锁,当传动部件2不运动时滚动体2由于第二弹簧10的作用又将传动部件2挤紧而使得传动部件2被锁定,因此,对于该锁定组件随时都能够在外部能量的驱使下驱使传动部件2朝向从第一位置向第二位置的方向运动而完成能量的收集,即能量的收集不受锁定组件状态的限制,但能量释放时必须在传动部件2解锁后才能释放,结构巧妙,下面通过一个实施例进一步说明。
131.如图13、图14所示,传动部件2包括传动杆17以及传动框18,动力源包括能量体19以及电动机11,能量体19可采用生物能、爆炸能、燃烧、物理相变(蒸汽膨胀推动,蒸汽形成可以为电加热、木炭燃料、化石燃料燃烧;对于相变热膨胀材料可以是隔离加热、热辐射加热方式(非直接接触),对一个内部实现可放置有,包括:石蜡、易挥发液体/气体、酒精、水、氢等)能等,当能量体19由于内部能量的释放导致外部体积变大时使得能量体19会推动传动框18带动传动杆17向右运动进而能够带动密封端101向右运动而使得密闭空间3内部储存负压能,当将锁定组件解锁时通过传动杆17能够带动电动机11发电实现能量的释放,因此通过该装置可实现外部生物能、爆炸或燃烧能等的回收;同样的道理,假设能量体19为波浪、风力等其他能量也能够以非稳定的形式推动传动框18实现能量的收集。
132.如图16、图17、图18所示为图13、图14的变化例,当能量体19由于外部能量作用产生形变而驱使传动框18运动时实现能量的收集,能量体19优选与传动框18紧固连接,当外部能量变小或消失时能量体19自身回复形变并带动传动框18及一个锁定组件复位,待外部能量再次作用在能量体19上产生形变时再次驱使传动框18运动实现能量的收集,如此往复,实现非稳定能量或单次小能量累积而成为大能量,通过解锁和负压释放而成为稳定可用大能量的收集利用。
133.需要指出的是,图16、图17、图18中的系统能量在释放过程中,如果能量体19在处于膨胀变形过程时,布置在传动杆17上的两个锁定组件均应该解锁。
134.本发明中的能量收集系统能够将自然界或人为制成的非稳定运动或能量转化为稳定可控运动或能量,即外部能量既可以是稳定的能量,也可以是非稳定的能量,例如外部能量可以是海水潮汐、海浪拍岸、高空坠物、弹簧反弹、气体膨胀、炸药/核能爆破,风车、水利或太阳能发电、人走路踩踏地面、汽车路面行驶、机电系统能量、振动冲击能量、声音能量、热能等等,本发明能够将非稳定运动或能量,或者将微小/短程能量,或短时/瞬态能量进行转化蓄积、或转化累积,并存储和控制,并根据输入运动和能量产生的需求而控制存储能量的释放。形成期望的稳定可控的物体运动或稳定形式供给的能量。
135.本实施例中,所述传动部件2具有锁定状态和解锁状态之间的第三状态,其中,所述第三状态能够在负压能被释放的过程中维持所述传动部件2匀速运动、加速运动或减速运动,在实际操作中,可通过触发体8驱使滚动体9与传动部件2之间保持适当的摩擦力进而能够调节传动部件2匀速运动、加速运动或减速运动,实现能量预设要求的释放或转化。
136.本发明中密闭空间3中负压储能能够实现,首先要保证密封端101与储能壳体1之间具有良好的密封效果,本发明中的密封端101可以采用多种结构形式实现,下面对密封端101的一种比较典型的实施例的结构进行介绍。
137.本实施例中,沿从第二位置到第一位置的方向上所述密封端101包括依次间隔套装在所述传动部件2上并与所述储能壳体1相匹配的第一活塞体4、第二活塞体5以及布置在所述第一活塞体4和第二活塞体5之间的柔性体6,如图2、图3所示,当所述密闭空间3中处于负压状态时,所述柔性体6的部分在大气压力的作用下被挤压至所述第二活塞体5和储能壳体1之间的间隙中进而实现所述密闭空间3的密封。
138.为了增加密封效果,在储能壳体1的内壁涂抹润滑油进而形成润滑油膜,能够增加密封端101与储能壳体1内壁之间的密封效果。
139.需要说明的是,本实施例中的柔性体6在密闭空间3中处于负压状态时起到弹性自
润滑的效果,具体地,一个第一活塞体4、第二活塞体5、柔性体6形成一组密封组件,为了达到密封的效果,传动部件2上的密封组件能够被配置为一组,也可被配置为依次串联在传动部件2上的多组,实现更优的密封效果。
140.具体地,柔性体6即可以采用实心的弹性结构,也可采用弹性囊体,弹性囊体内部填充流体,流体可以是气体、液体或微小(自润滑)固体颗粒(如纳米球体等)。当采用弹性囊体时,柔性体6上具有第二阀门13以及第三阀门14,第二阀门13以及第三阀门14均为单向阀,其中,柔性体6内部的流体可以通过第二阀门13流出,便于密封端101朝向第二位置运动,第三阀门14可以向柔性体6内补充流体,便于密封密闭空间3。
141.在具体实施过程中,本发明中的动力源实施可以采用多种形式,不仅可以采用包括能量体19的形式,还可以采用包括如下任一种结构的组合形式:
142.组合形式1:流体输送泵,用于所述密闭空间的抽真空以及充流体,以流体为气相为例,密封端101的运动和密闭空间3内部的抽真空均由流体输送泵完成,操作过程中,先通过流体输送泵向密闭空间3的内部充气推动密封端101从第一位置运动到第二位置后,此时锁定传动部件2,流体输送泵再将密闭空间3中的气体抽出,实现密闭空间3内的真空状态,能量释放时将传动部件2解锁即可,解锁后在地球大气的作用下通过输出端102即可释放,例如输出的能量对输出端102实现相应的拉动、拖拽的力,实现能量的释放。
143.组合形式2:流体输运泵以及电动机11,所述流体输运泵用于抽真空和推动密封端101从第一位置运动到第二位置的运动,在组合形式1原理的基础上,所述电动机11能够在所述传动部件2的驱使下发电,电动机11用于将输出端102输出的负压能转化成电能,在实际的设置中输出端102可配合齿轮组连接电动机11实现,也可采用其他的传动方式实现电动机11的发电;具体地,如图1所示,流体输运泵通过第一阀门12连接密闭空间3,当密封端101处于第一位置并将传动部件2调节至解锁状态时,通过流体输运泵向密闭空间3中充气进而能够推动密封端101从第一位置运动到第二位置后再将传动部件2调节至锁定状态后,通过流体输运泵再将密闭空间3抽真空,此时实现了密闭空间3内部的负压储能,当需要能量输出时,将传动部件2调节至解锁状态后在地球大气压的作用下密封端101即被推动并朝向第一位置运动,此时可带动电动机11发电,实现负压能向电能的转化。
144.组合形式3:流体输运泵,用于抽真空,当仅采用流体输送泵时,可采用图6中实施例的情形理解,流体输送泵优选为真空泵,仅仅实现密闭空间3内部抽真空,当密封端101运动到第一位置时,第四阀门15打开后在第一弹簧7的作用下密封端101被推动至第二位置,关闭第四阀门15后,启动流体输送泵即可再将密闭空间3内部抽成真空,实现密闭空间3内部的负压储能状态;
145.组合形式4:电动机11,能够驱使所述密封端101从第一位置向第二位置运动且具有发电功能,在该组合形式中,密封端101从第一位置向第二位置的运动及密闭空间3内抽真空均依靠电动机11的动力,当密封端101位于第二位置且密闭空间3内处于真空状态时,传动部件2处于解锁状态时,输出端102能够带动电动机11运行并发电,其中,电动机11优选采用永磁式三相交流同步电动机,该电动机具有电机和发电机的双重性能。
146.组合形式5:电动机11,仅具有发电功能,外部能量能够直接驱动传动部件2运动并带到密封端101朝向第二位置的方向运动使得密闭空间3内形成真空,如图13~图18所展示的实施例均为该组合形式5所涉及的形式,该结构的组合形式尤其适用于如波浪能、风能、
爆炸能、热能等非稳定状态能量收集发电的实施。
147.本发明中还包括控制机构,所述控制机构分别信号连接所述动力源、锁定组件,进而实现以设定方式释放所述负压或者补充所述负压,通过控制机构能够控制动力源、锁定组件动作。在具体的实施过程中,可匹配相应的传感器、检测器以实现整个能量存储与释放各个环节的有序进行,如图19、图20所示,展示了能量收集和释放的多种形式,其中,在传感调配控制环节通过控制机构及各个传感器、检测器实现整个系统的检测与控制,保证能量的收集与释放有序进行,具体的能量收集释放形式可由运动或能量产生输入(或输入输出一体)环节、基于环绕介质的能量或运动能量转化、锁定存储和释放环节、运动或能量产生输出环节配合实施。
148.本发明中的基于地球大气储能的能量收集系统可应用于储能发电一体化电厂,储能和释能操作更加简单,安全无污染。
149.本发明还提供了一种储能装置,包括多个串联布置或并联布置的基于地球大气储能的能量收集系统,具体地,不同的基于地球大气储能的能量收集系统中采用如下任一种或任多种实施形式:
150.各自的传动部件2具有相同、部分相同或完全不同的高度和/或朝向;
151.各自的传动部件2具有相同、部分相同或完全不同的结构,可根据实际的工况灵活选择各自的结构;
152.各自的传动部件2具有相同、部分相同或完全不同的状态,所述状态为所述传动部件2在第一位置和第二位置之间的位置状态,即能量存储释放可同步,也可不同步而分别各自进行;
153.各自的锁定组件具有相同、部分相同或完全不同的结构,各系统可采用各自的锁定组件以匹配各自的场景;
154.各自的动力源采用相同、部分相同或完全不同的形式。
155.如图8所示,多个并联布置的基于地球大气储能的能量收集系统共用一个共用腔室16,共用腔室16内部充满流体,如图9所示,流体被抽走后共用腔室16以及与共用腔室16相连的多个密闭腔室内均为真空状态,如图10所示,多个系统能量释放可不同步进行,且传动部件2的朝向不同,可实现多个不同的系统不同步动作进而实现能量储存和释放更多的灵活性。
156.如图15所示,为多个基于地球大气储能的能量收集系统并联布置的实施形式,具有稳定和非稳定能量收集的性能。
157.如图11所示,为多个串联布置的基于地球大气储能的能量收集系统共用一个共用腔室16,可实现多个不同的系统同步动作或不同步动作进而实现能量储存和释放更多的灵活性,在实际应用中,传动部件2的朝向、高度也可根据实际的应用场景灵活布置,如图12所示。
158.本发明还提供了一种基于地球大气储能的能量收集方法,包括如下步骤:
159.s1:外部能量一次或多次作用在传动部件2上使得传动部件2所具有的密封端101朝第一方向产生位移进而使得所述密封端101与承载所述密封端101的储能壳体1之间的密闭空间3变大,且由于传动部件2上具有的锁定组件进而不允许所述密封端101朝向第二方向运动,其中,密闭空间3为负压空间,第一方向与第二方向的方向相反;
160.s2:解锁所述锁定组件时,在地球大气的作用下所述密封端101朝向第二方向运动,传动部件2具有输出端102,密封端101朝向第二方向运动时带动输出端102运动进而使得密闭空间3变小。
161.具体地,所述密封端101在所述储能壳体1中能够在第一位置和第二位置之间运动,其中,从第一位置向第二位置运动的方向为第一方向,当所述密封端101位于所述第一位置和第二位置之间时,所述s1、s2依次执行或交替执行;当所述密封端101位于所述第一位置时,所述s1、s2依次执行;当所述密封端101位于所述第二位置时,先执行s2再执行s1。
162.实施例2:
163.本实施例为实施例1的一个变化例。
164.本实施例中,所述密闭空间3中设置有第一弹簧7,如图4~图7所示,所述第一弹簧7的一端连接所述密封端101,另一端连接储能壳体1,其中,所述第一弹簧7始终处于压缩状态。
165.本实施例中,储能壳体1上设置有第四阀门15,密闭空间3能够通过第四阀门15与外部大气连通。如图4所示,密封端101处于第二位置,关闭第四阀门15,第一阀门12优选为单向阀,流体输运泵的进口端通过第一阀门12连接密闭空间3,启动流体输运泵对密闭空间3抽真空,如图5所示,抽真空完成后,当需要释放密闭空间3中的负压能时,将传动部件2调节至解锁状态,在地球大气压的作用下密封端101带动传动部件2朝向第一位置运动进而实现能量的输出,直至密封端101运动至第一位置,如图6所示,此时,打开第四阀门15,外部大气进入到密闭空间3中,第一弹簧7的弹力作用下密封端101再次被推动朝向第二位置运动,如图7所示。
166.本实施例中的密封端101所具有的柔性体6中分别设置有第一永磁体20、第二永磁体21,如图21、图22所示,储能壳体1的外部的分别设置有第一电磁体22、第二电磁体23,第一电磁体22、第二电磁体23分别与第一永磁体20、第二永磁体21相对应,第一电磁体22与第二电磁体23相对的一端磁极相反,第一电磁体22、第二电磁体23通电后产生电磁场并分别吸引第一永磁体20、第二永磁体21,使得柔性体6与储能壳体1外壁接触的部位在磁力的作用下紧密接触实现密封。
167.进一步地,在实际应用中,在储能壳体24的内部沿轴向方向可设置多个均匀或非均匀布置的密封凹槽24,密封凹槽24均布置在密封端101停止的位置,如图22、图23所示,密封端101停止时恰恰能够使柔性体6嵌入到密封凹槽24中,使得传动部件2停止运动后密封腔体3保持更优的静密封状态,尤其适用于对于能量的释放具有固定的位移输出的应用场景。
168.实施例3:
169.本实施例为实施例1的另一个变化例。
170.本实施例中,密封端101所具有的柔性体6中分别设置有第一运动块31、第二运动块32以及沿传动部件2周向布置的第一囊体25,第一囊体25布置在第一运动块31、第二运动块32的内侧,第一运动块31、第二运动块32优选为永磁体,如图24所示,第一囊体25的内部填充有相变材料,例如石蜡,通过对第一囊体25加热使得相变材料发生相变进而能够自身体积发生变化产生对第一运动块31、第二运动块32的推力进而能够使第一运动块31、第二运动块32推动柔性体6与储能壳体1内壁之间的挤紧力增加密封效果,如图25所示,为第一
囊体25内相变材料发生相变后体积增大时的情形,通过该结构设置可使得柔性体6与储能壳体1外壁接触的部位紧密接触实现密封,其中,第一运动块31、第二运动块32的外部均设置有用于密封的柔性结构,确保与储能壳体1内壁之间密封接触。
171.对于相变材料的加热可采用电加热的方式实现。
172.需要说明的是,以上用于密封端101密封的结构也可用在锁定组件中用于锁死和解锁,也能够实现本发明中某些特殊场景的效果。
173.实施例4:
174.本实施例为实施例3的变化例。
175.本实施例提供了一种结构干涉锁定的结构,该结构基于实施例3的原理实现锁定组件的锁定和解锁。
176.如图26所示,在传动部件2的周向设置且沿径向向外依次布置的第二囊体26、锁定挡块29,第二囊体26的内部填充两种相变温度有一定差异的相变材料且两种相变材料可同时加热,也可实现分别加热。
177.当通电加热两种相变材料时,其中一种熔点低先液化或气化,如石蜡27,增压挤压另一种高熔点相变材料,如铋锡合金28,加热到70多度时,锡铋合金28开始融化,之前液化或气化的材料膨胀,将正在融化的锡铋合金挤压到锁定挡块29向外滑动的方向上排列,如图27所示,同时挤压锁定挡块29外推使得锁定挡块29的端部进入到锁定槽30中,实现密封锁死位置。然后降温,由于锡铋合金28的熔点高,所以先开始凝固,伴随其周边的另外一种更低熔点相变材料仍然处于高压的气态或液态,此时之前沿着推动方向融化和排列的铋锡合金28逐渐冷却固化,然后另一种相变材料石蜡27冷却,变为液体或小体积固体,但由于铋锡合金28早已凝固定型,处于抵住外推块状态,形成无能量锁死状态,如图28所示。
178.如果二次加热,两种相变材料通过温度调控可实现同时软化,由于第二囊体26内部为负压状态,锁定挡块29会跟随第二囊体26运动,使得锁紧状态释放,解锁。
179.实施例5:
180.本实施例为实施例1的又一个变化例。
181.本实施例中提供了一种棘轮机构锁定的结构,包括锁定结构体35、第三弹簧36、解锁功能件37,传动部件2上设置有阻挡齿33,储能壳体1的内部设置有容纳空间34,锁定结构体35的一端通过固定轴38可转动的安装在容纳空间34中且与安装在储能壳体1上的第三弹簧36弹性配合,锁定结构体35的另一端延伸到容纳空间的外部并与阻挡齿33活动配合,如图29所示,当传动部件2朝向第一方向运动时,锁定结构体35不能阻挡传动部件2带动阻挡齿33运动,当传动部件2朝向第二方向运动时,锁定结构体35阻挡传动部件2带动阻挡齿33运动并能够锁定,当操作解锁功能件37朝向传动动部件2的方向运动时能够使得锁定结构体35的另一端远离阻挡齿33运动而能够使传动部件2朝向第一方向和第二方向运动都不被锁定,通过以上操作实现本发明中的锁定和解锁的操作。
182.以图16、图17、图18为例,本发明的工作原理如下:
183.当能量体19由于外部非稳定能量作用产生形变且形变方向朝向传动框18时,对传动框18施力进而驱使传动框18运动向右运动,由于与传动框18直接相连的锁紧组件在向右的方向为锁定状态因此带动传动杆17向右运动,由于布置在储能壳体1上的锁定组件允许传动杆17向右运动使得密封端101被传动杆17向右拉动进而密闭空间3体积变大,负压能被
收集储存,如图16、图17所示。
184.当外部能量变小或消失时能量体19自身回复形变并带动传动框18及一个锁定组件复位,此时传动杆17允许与传动框18直接连接的锁定组件向左运动,因此传动框18的复位不受到锁定组件的干涉。待外部能量再次作用在能量体19上产生形变时再次驱使传动框18向右运动实现能量的收集,如此往复,实现非稳定能量的收集。
185.当密闭空间3中的能量需要释放时只需将位于储能壳体1上的锁定组件调节至解锁状态时传动部件2所具有的密封端101能够在地球大气压力的作用下从第二位置运动到第一位置进而带动输出端102同步运动,输出端102连接有电动机11,电动机11具有发电功能,传动部件2能够驱使电动机11发电进而实现负压能向电能的转换,直至密封端101运动到第一位置,负压能被释放完毕。
186.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
187.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1