一种永磁同步电机电流采样在线校准方法与流程
1.本发明属于信号检测领域,具体涉及一种永磁同步电机电流采样在线校准方法,适用于永磁同步电机高性能指标要求的场所,特别适用于振动噪声治理和伺服驱动等需要永磁同步电机具备高精度电流检测的领域。
背景技术:
2.随着钕铁硼等稀土永磁材料剩磁性能的提高和现代控制技术的发展,永磁同步电机以其维修方便、响应迅速等优点在低噪声船用电力推进领域广泛应用。永磁同步电机低噪声、高精度控制,需要获得电机高精度相电流信息。因此,研究适用于永磁同步电机的电流采样在线校准方法具有重要的应用价值。
3.根据相电流幅值、相位偏差和转矩、转速等状态量之间的关系,众多学者提出了一系列的电流采样校正方法。2020年文献《基于改进相电流重构的电流采样校正方法》在不增加硬件成本和投入的前提下,通过采用相电流重构和零漂在线估计的方法,获得了永磁同步电机准确的三相电流。然而,现有的电流采样校准方法有以下缺点:
4.1)受运行工况和电磁、环境因素的影响,电流采样偏差通常并不固定,无法通过离线进行查表补偿;
5.2)受安装孔径和空间布局的影响,某些场合无法采用高精度电流传感器和采样电阻;
6.3)高精度电阻可影响相电流采样性能,但是相电流采样精度受电流传感器精度、采样调理电路等多重因素影响,采样总体性能的提高存在短板效应。
7.
技术实现要素:
8.发明目的是针对以上存在的问题,提出一种简单可靠、适于工程应用的永磁同步电机电流采样在线校准方法。
9.本发明解决其技术问题所采用的技术方案是:一种永磁同步电机电流采样在线校准方法,用于电压型或电流型逆变器供电的三相或多相永磁同步电机,基于电流检测计算环节、滑模变结构位置辨识环节、角度偏差选择环节、位置偏差计算环节和电流采样计算补偿环节组成的控制系统,步骤为
10.步骤1,通过电流传感器采样得到永磁同步电机的三相电流ia、ib和ic,对采样电流ia、ib和ic进行坐标变换可以得到静止两相坐标系下电流i
α
和i
β
;
11.步骤2,根据滑模变结构位置辨识算法得到电机转子初始位置辨识值
12.步骤3,根据是否安装机械式位置传感器,确定辨识角度偏差若存在位置传感器,则辨识角度偏差来源于步骤2位置辨识值与机械位置传感器的偏差,然后转至步骤5;否则,跳转至步骤4计算该辨识角度偏差;
13.步骤4,利用基于扰动的极值搜索算法得到无位置传感器下的辨识角度偏差
14.步骤5,根据位置辨识偏差计算采样电流幅值偏差进而计算出准确的电流采样值i
st
。
15.所述的一种永磁同步电机电流采样在线校准方法,其步骤1具体为:
16.将电机定子静止三相坐标系下的电流ia、ib和ic通过静止两相坐标系下的3s/2s坐标变换可得到电流i
α
和i
β
,计算式为:
[0017][0018]
所述的一种永磁同步电机电流采样在线校准方法,其步骤1中滑模变结构位置辨识由滑模观测器和锁相环顺序执行实现,滑模观测器可通过基于电流和磁链的二阶或高阶状态观测器实现,锁相环可配置成二阶或高阶极点的传递函数。
[0019]
所述的一种永磁同步电机电流采样在线校准方法,其步骤3具体为:
[0020]
步骤3.1,若电机安装有机械位置传感器,辨识角度偏差由下式计算:
[0021][0022]
其中θ
sensor
来源于机械式位置传感器;
[0023]
步骤3.2,若电机没有机械位置传感器,辨识角度偏差赋值为步骤4计算出来的
[0024]
所述的一种永磁同步电机电流采样在线校准方法,其步骤4具体为:
[0025]
步骤4.1,通过3s/2r旋转坐标变换将静止三相坐标系下采样电流ia、ib和ic变换为转矩电流iq,电机矢量控制和位置变换都采用补偿后的辨识角度计算式为:
[0026][0027][0028]
步骤4.2,根据当前转矩电流i
q(n+1)
和上周期转矩电流i
q(n)
,计算转矩电流偏差δiq,计算式为:
[0029]
δiq=i
q(n+1)-i
q(n)
;
[0030]
步骤4.3,根据转矩电流偏差δiq的绝对值计算位置扰动δθ改变的步长a,计算式为:
[0031]
a=f(|δiq|)
[0032]
其中位置扰动步长a是转矩电流偏差δiq的正相关函数,两者之间可为线性、平方或指数等关系。
[0033]
步骤4.4,若第一次计算位置扰动的大小和方向,设置δθ的初始值为δθ
initial
,位置扰动符号函数sgn=1;
[0034]
步骤4.5,若δiq大于零,表示转矩电流变大,位置扰动δθ符号函数赋值需要取反;若δiq小于零,表示转矩电流变小,位置扰动δθ符号函数赋值不变;若δiq等于零,表示转矩电流不变,位置扰动δθ符号函数赋值保持不变;
[0035]
步骤4.6,若δiq等于零,表示已得到无位置传感器控制下的辨识角度偏差退出步骤4;若δiq不等于零或第一次计算位置扰动,表示尚未得到辨识角度偏差此时利用积分函数将偏差叠加到位置辨识算法初始位置辨识值然后继续迭代计算位置扰动δθ。
[0036]
所述的一种永磁同步电机电流采样在线校准方法,其步骤5具体包括:
[0037]
步骤5.1,根据辨识角度偏差计算采样电流幅值偏差计算式为:
[0038][0039]
步骤5.2,根据采样电流幅值偏差更新准确的电流采样值i
st
,计算式为:
[0040][0041]
其中is和is分别为abc相电流初始采样的幅值和实时值,i
st
为校准后的相电流采样值。
[0042]
本发明的有益效果是:利用滑模变结构位置辨识算法得到位置辨识初始值,然后利用基于扰动的极值搜索算法得到无位置传感器下位置辨识偏差的稳态值,选择角度偏差后,再根据位置辨识偏差和相电流采样偏差之间的关系得到采样电流的补偿值。
附图说明
[0043]
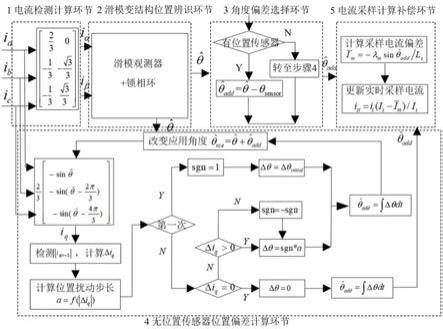
图1是本发明的结构示意图。
[0044]
各附图标记为:1—电流检测计算环节,2—滑模变结构位置辨识环节,3—角度偏差选择环节,4—位置偏差计算环节,5—电流采样计算补偿环节。
具体实施方式
[0045]
下面结合附图和实施例对本发明的具体实施方式进行说明。
[0046]
如图1所示,本发明用于电压型或电流型逆变器供电的三相或多相永磁同步电机的控制系统由电流检测计算环节1、滑模变结构位置辨识环节2、角度偏差选择环节3、位置偏差计算环节4和电流采样计算补偿环节5组成,控制方法包括以下步骤:
[0047]
步骤1,通过电流传感器采样得到永磁同步电机的三相电流ia、ib和ic,对采样电流ia、ib和ic进行坐标变换可以得到静止两相坐标系下电流i
α
和i
β
,计算式为:
[0048][0049]
步骤2,根据滑模变结构位置辨识算法得到电机转子初始位置辨识值其中滑模观测器可通过基于电流和磁链的二阶或高阶状态观测器实现,锁相环可配置成二阶或高阶极点的传递函数。
[0050]
步骤3,根据是否安装机械式位置传感器,确定辨识角度偏差若存在位置传感器,则辨识角度偏差来源于步骤2位置辨识值与机械位置传感器的偏差然后转至步骤5;否则,跳转至步骤4计算该辨识角度偏差。
[0051]
步骤4,利用基于扰动的极值搜索算法得到无位置传感器下的辨识角度偏差具体包括:
[0052]
步骤4.1,通过3s/2r旋转坐标变换将静止三相坐标系下采样电流ia、ib和ic变换为转矩电流iq,其中电机矢量控制和位置变换都采用补偿后的辨识角度计算式为:
[0053][0054][0055]
步骤4.2,根据当前转矩电流i
q(n+1)
和上周期转矩电流i
q(n)
,计算转矩电流偏差δiq,计算式为:
[0056]
δiq=i
q(n+1)-i
q(n)
[0057]
步骤4.3,根据转矩电流偏差δiq的绝对值计算位置扰动δθ改变的步长a,计算式为:
[0058][0059]
位置扰动步长a与转矩电流偏差δiq之间为正相关函数关系,上式中的a和b为两种实施案例,k1和k2需为正数,n需为正整数。
[0060]
步骤4.4,第一次计算位置扰动的大小和方向时,设置δθ的初始值δθ
initial
为0.03rad,位置扰动符号函数sgn=1;
[0061]
步骤4.5,若δiq大于零,表示转矩电流变大,位置扰动δθ符号函数赋值需要取反sgn=-sgn;若δiq小于零,表示转矩电流变小,位置扰动δθ符号函数赋值不变;若δiq等于零,表示转矩电流不变,位置扰动δθ符号函数赋值保持不变;
[0062]
步骤4.6,若δiq等于零,表示已得到无位置传感器控制下的辨识角度偏差可
退出步骤4;若δiq不等于零或第一次计算位置扰动,表示尚未得到辨识角度偏差此时利用数字积分函数将偏差叠加到位置辨识算法初始位置辨识值然后继续迭代计算位置扰动δθ。
[0063]
步骤5,根据位置辨识偏差计算采样电流幅值偏差进而计算出准确的电流采样值i
st
。具体包括:
[0064]
步骤5.1,根据辨识角度偏差计算采样电流幅值偏差计算式为:
[0065][0066]
步骤5.2,根据采样电流幅值偏差计算出准确的电流采样值i
t
,计算式为:
[0067][0068]
其中,is和is分别为abc相电流初始采样的幅值和实时值,i
st
为校准后的相电流采样值。
[0069]
上述实施例仅例示性说明本发明的原理及其功效,以及部分运用的实施例,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1