用于电气化车辆的智能工厂系统的制作方法
本公开涉及一种用于车辆的智能工厂系统。
背景技术:
1、一般而言,车辆电气化构件是指应用于电动车辆(ev)、混合动力车辆(hev)、插电式混合动力车辆(phev)、燃料电池电动车辆(fcev)等的构件,该车辆电气化构件使用电驱动马达代替内燃机作为车辆的驱动动力源。
2、这些电气化构件将电池的电能转化为机械能,以形成环保车辆的驱动动力。
3、例如,电气化构件包括驱动马达、逆变器、转换器、电池等,并且它们被组装以形成车辆的动力传动系(即,驱动系统)。
4、通常,动力传动系在通过各个工厂时完成。即,在不同的工厂生产应用到动力电气(pe)模块的作为动力传动系的驱动马达、减速器等,然后通过在驱动马达在工厂间移动时组装各个构件完成动力传动系。
5、因此,在现有技术中,由于生产和组装工厂的划分,物流成本会变得过高。
6、此外,在现有技术中,由于驱动马达以半组装状态在工厂间移动,所以会存在产品的清洁度或质量控制不足的缺点。
7、上面的在背景技术部分中公开的信息仅仅是为了增强对本公开的背景技术的理解,因此其可包括对于本领域技术人员来说不是在本国已经公知的现有技术的信息。
技术实现思路
1、本公开提供一种能够降低制造成本并且减少工厂场地的用于车辆的智能工厂系统。
2、根据本公开的这种智能工厂系统,由于动力传动系在单个工厂中组装,因此可以实现对质量问题或设计变更的快速反馈和响应。
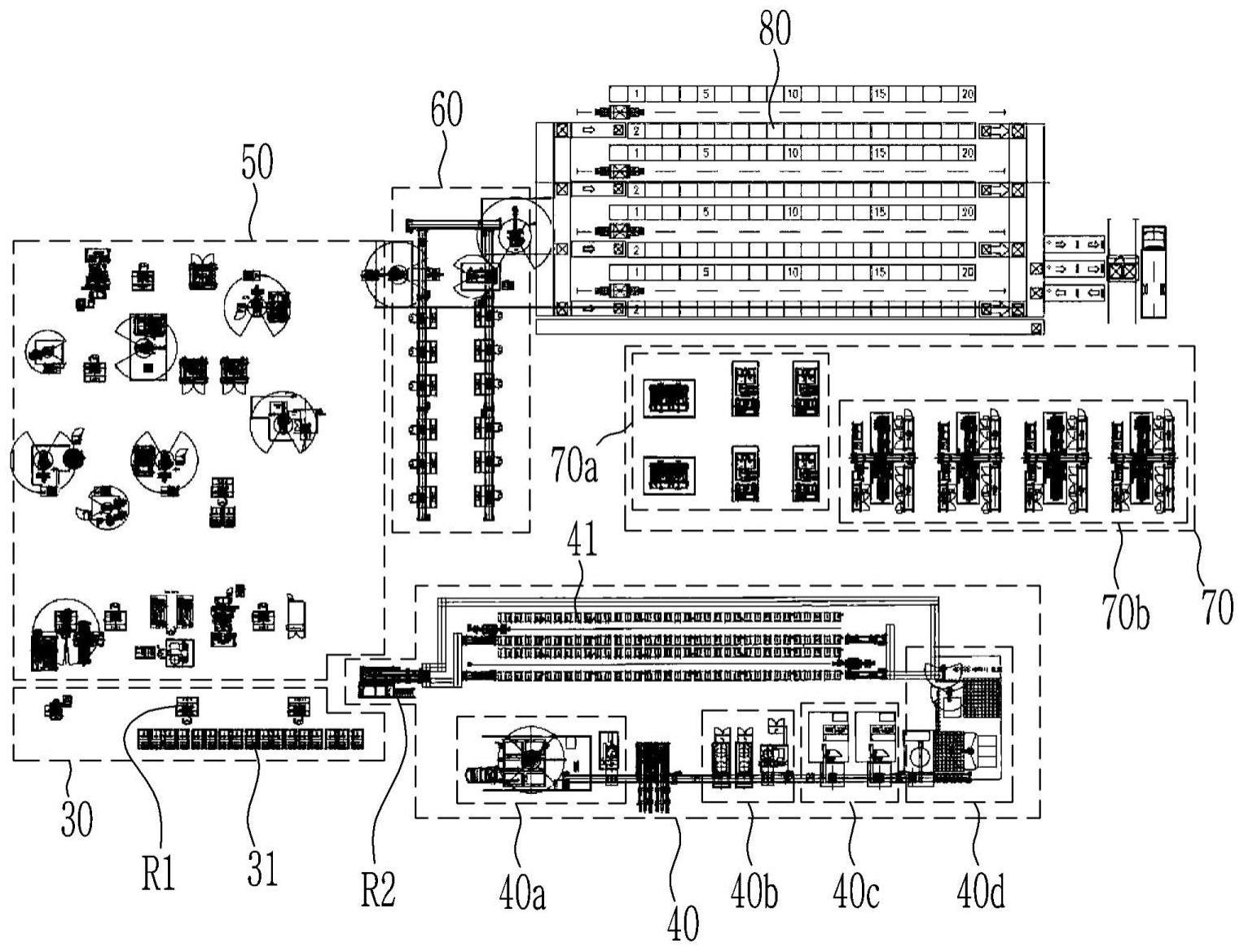
3、一种用于电气化车辆的智能工厂系统包括:部件供应区,在该部件供应区中,将驱动马达和用于形成要组装到驱动马达的减速器的减速器构件的成套模块供应到自主移动机器人的上部部分;定子组装区,在该定子组装区中,组装要组装到驱动马达的定子;减速器组装区,被配置为将减速器构件顺序地组装到驱动马达;子组装区,在该子组装区中,驱动马达、定子以及减速器构件电连接;以及测试区,在该测试区中,检查驱动马达、定子和减速器构件的组装质量。
4、自主移动机器人可以包括:主体,该主体附接有激光雷达传感器;马达夹具,该马达夹具配置在主体的上部部分上并且可连接到驱动马达;安置部分,该安置部分配置在主体的上部部分上,被配置为与成套模块安置在一起,并且安装有用于检查减速器构件的遗漏部分的视觉传感器;以及监视器,该监视器配置在主体的上部部分上并且用于检查组装处理状态。
5、在部件供应区中,当自主移动机器人定位到储存驱动马达和成套模块的部件托架时,该自主移动机器人可以被配置为将马达夹具连接到驱动马达,并且装载要安置在安置部分上的成套模块。
6、定子组装区可以包括:第一定子组装分区,在该第一定子组装分区中,将发夹形件在仿真夹具中对齐;第二定子组装分区,在该第二定子组装分区中,化学涂覆发夹形件;第三定子组装分区,在该第三定子组装分区中,将在仿真夹具中对齐的发夹形件插入到定子中;以及第四定子组装分区,在该第四定子组装分区中,对插入到定子中的发夹形件进行切割和焊接。
7、定子组装区可以包括定子托架,该定子托架被配置为储存通过插入发夹形件完成的定子。
8、减速器组装区可以包括:组装装置,该组装装置被配置为组装包括在成套模块中的后盖和分解器;施涂器,该施涂器被配置为将密封剂涂敷到驱动马达;测量装置,该测量装置被配置为通过转移装置将组装在一起并且安置在自主移动机器人上的驱动马达和定子转移到安装夹具,并且测量驱动马达和定子的状态;以及加压器,该加压器被配置为向安装在安装夹具上的驱动马达和定子施加压力。
9、减速器组装区可以包括测试机器人,该测试机器人被配置为检查减速器构件的组装状态。
10、在子组装区中,可以将逆变器、接线块、电缆以及软管组装到驱动马达和定子。
11、测试区可以包括:第一测试分区,在该第一测试分区中,测试电缆连接到驱动马达和定子,并且执行泄漏测试;以及第二测试分区,在该第二测试分区中,将测试电缆断开,并且组装支架和油塞。
12、用于电气化车辆的智能工厂系统可以进一步包括成品托架,该成品托架被配置为经由自主移动机器人储存通过测试区的已完成构件。
13、因此,根据示例性实施例,用于电气化车辆的动力传动系可以在单个工厂而不是通过分散的组装工厂制造,从而降低了制造成本并且减少了整个工厂场地。
14、此外,由于动力传动系在单个工厂中组装,因此可以实现对质量问题或设计变更的快速反馈和响应。
15、因此,用于车辆的智能工厂系统可以缩短整体周期时间,从而提高生产率。
16、在本公开的详细描述中将明确地或隐含地描述可以通过示例性实施例获得或预测的其他效果。即,将在下面的详细描述中描述根据示例性实施例预测的各种效果。
技术特征:
1.一种用于电气化车辆的智能工厂系统,所述智能工厂系统包括:
2.根据权利要求1所述的智能工厂系统,其中,所述自主移动机器人包括:
3.根据权利要求2所述的智能工厂系统,其中,在所述部件供应区中,当所述自主移动机器人定位到储存所述驱动马达和所述成套模块的部件托架时,所述自主移动机器人被配置为将所述马达夹具连接到所述驱动马达,并且装载要安置在所述安置部分上的所述成套模块。
4.根据权利要求1所述的智能工厂系统,其中,所述定子组装区包括:
5.根据权利要求4所述的智能工厂系统,其中,所述定子组装区包括定子托架,所述定子托架被配置为储存通过插入所述发夹形件完成的所述定子。
6.根据权利要求1所述的智能工厂系统,其中,所述减速器组装区包括:
7.根据权利要求1所述的智能工厂系统,其中,所述减速器组装区包括测试机器人,所述测试机器人被配置为检查所述减速器构件的组装状态。
8.根据权利要求1所述的智能工厂系统,其中,在所述子组装区中,将逆变器、接线块、电缆以及软管组装到所述驱动马达和所述定子。
9.根据权利要求1所述的智能工厂系统,其中,所述测试区包括:
10.根据权利要求1所述的智能工厂系统,进一步包括成品托架,所述成品托架被配置为经由所述自主移动机器人储存通过所述测试区的已完成构件。
技术总结
一种用于电气化车辆的智能工厂系统,包括:部件供应区,在该部件供应区中,将驱动马达和用于形成要组装到驱动马达的减速器的减速器构件的成套模块供应到自主移动机器人的上部部分;定子组装区,在该定子组装区中,组装要组装到驱动马达的定子;减速器组装区,被配置为将减速器构件顺序地组装到驱动马达;子组装区,在该子组装区中,驱动马达、定子以及减速器构件相互电连接;以及测试区,在该测试区中检查驱动马达、定子以及减速器构件的组装质量。
技术研发人员:金秉建,车泰旭,朴赞祐,李圣焕
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!