一种基于协同控制的独立电力系统频率控制方法及系统
1.本发明属于电力系统频率控制领域,更具体地,涉及一种基于协同控制的 独立电力系统频率控制方法及系统。
背景技术:
2.独立电力系统一般存在与一些企业自备电厂和电网供电不便地区,频率的 稳定是系统稳定运行的重要指标,关系到企业用电安全和居民用电稳定。独立 电力系统由于系统容量小,存在系统惯性小和不易稳定的问题,尤其当系统存 在需要频繁启停的设备时,启停的瞬时功率甚至可以达到装机容量的20%,系 统极易出现失稳、机组解列的情况,可能造成严重的经济损失。保证独立电力 系统频率的快速稳定是维持系统安全稳定运行的关键。
3.目前,系统频率控制手段分为两种形式:一种是以应用储能为核心的调频 手段,另一种是对于原系统应用虚拟惯量控制、转子动能控制等手段。其中, 惯量控制包括基于频率响应的附加功率给定控制、基于虚拟同步机的电压源型 控制和追踪优化曲线控制等几种常见形式,通过增加系统的虚拟惯性达到维持 系统频率稳定的目标。基于频率响应的附加功率给定是指在原有变流器控制基 础上,引入电网侧频率积/微分偏差,生成功率附加量,叠加后生成功率参考值, 具有下垂控制、惯性控制和综合控制三种形式。下垂控制是模拟传统发电机组 的一次调频曲线中的下降比例关系,通过在原有机组输出功率中叠加一个频率 偏差相关量增加系统阻尼;惯性控制模拟的是同步发电机组的惯性响应,增加 了系统的等效惯性,达到抑制系统频率快速变化的目的;综合控制将下垂控制 与惯性控制结合,通过控制转子转速的变化吸收或释放转子动能。
4.专利文献cn202010141050.7中公开提供了一种企业自备电厂并网联络线 功率快速恒定的控制方法,该方法利用电厂内部闲置或淘汰的部分容量较小机 组,将其改造为恒励磁机组,通过背靠背变流器与电网并联运行,实现变速恒 频控制。该方法采用联络线功率偏差信号作为虚拟惯量控制的输入信号,设计 了机组的虚拟惯量控制方法,能够快速响应联络线功率变化,从而快速、高效 地控制联络线功率稳定,但该方案中采用的附加功率控制方法存在参数固定无 法适用控制的动态变化过程。实际应用中传统的独立电力系统存在固有时间的 延迟,因此频率恶化非常快,系统很不稳定;此发明控制下效果明显,但也存 在转子固有速度控制与转子动能调制调频之间的矛盾。
技术实现要素:
5.针对现有技术的缺陷,本发明的目的在于提供一种基于协同控制的独立电 力系统频率控制方法及系统,旨在解决现有的经过机组改造后的独立电力系统 存在大阶跃负荷时采用的附加功率控制方法存在参数固定无法适应控制的动态 变化过程,在实际应用中传统的独立电力系统存在固有时间的延迟,因此频率 恶化非常快,系统很不稳定的问题。
6.为实现上述目的,一方面,本发明提供了一种基于协同控制的独立电力系 统频率的控制方法,包括以下步骤:
7.(1)监测独立电力系统是否发生阶跃性负荷波动,当独立电力系统内发生 阶跃性负荷波动时,转至步骤(2);
8.(2)将独立电力系统的实际频率与参考频率作差,获取的频率误差;
9.(3)当频率误差超过死区控制范围时同时进入步骤(4)和步骤(7),否 则只进入步骤(7);
10.(4)基于协同控制,根据当前状态下所述独立电力系统的实际电角速度、 独立电力系统的电角速度参考值、恒励磁机组转子的实际转速、恒励磁机组的 极对数、恒励磁机组的定子磁链和机侧变流器q轴实际电流,获取恒励磁机组 的附加功率;
11.(5)基于恒励磁机组的附加功率、转动惯量以及上一时刻的恒励磁机组的 实际转速,通过调节恒励磁机组的转速参考值对所述恒励磁机组的实际转速进 行调节;
12.(6)重复步骤(2)~(5),直至恒励磁机组的转速标幺值不在预设范围 时,停止执行转子动能控制,等待独立电力系统处于稳态转至步骤(9);
13.(7)将频率差值经pi控制获取独立电力系统的功率差额,并将功率差额 按比例分配至各机组;
14.(8)将各机组分配到的功率差额叠加至机组给定输入指令,调节汽轮机的 给定功率参考值,直至独立电力系统处于稳态;
15.(9)转至步骤(1),直至独立电力系统停止工作;
16.其中,恒励磁机组通过背靠背变流器并入独立电力系统中;背靠背变流器 包括机侧变流器和网侧变流器;其中,机侧变流器用于控制恒励磁机组的输出 功率;网侧变流器用于直流侧直流母线电压稳定,同时控制机侧变流器功率向 网侧传输。
17.进一步优选地,将恒励磁机组接入独立电力系统的方法,包括以下步骤:
18.s1:选取独立电力系统中的任一火电机组改造为恒励磁机组;
19.s2:对网侧变流器采用电压外环和电流内环的双环控制;且对机侧变流器采 用转速外环、电流内环的双环控制和零d轴电流矢量控制;
20.s3:采用经过s2处理的所述网侧变流器和所述机侧变流器构建背靠背变流 器,将所述恒励磁机组通过所述背靠背变流器并入独立电力系统中。
21.进一步优选地,网侧变流器采用电压外环和电流内环的双环控制包括以下 步骤:
22.将测量的直流母线电压和直流母线电压参考值作差,获取直流母线电压误 差;
23.将直流母线电压误差经pi调节后输出网侧变流器d轴的电流参考值,并设 置网侧变流器q轴的电流参考值为0;
24.将网侧变流器输出端口三相电流经派克变换后得到网侧变流器dq轴的实 际电流;
25.将网侧变流器d轴的电流参考值与实际电流作差,获取网侧变流器d轴电 流误差;
26.将网侧变流器q轴的电流参考值与实际电流作差,获取网侧变流器q轴电 流误差;
27.将网侧变流器dq轴电流误差经pi调节后经svpwm产生网侧脉冲调制信 号传送至网侧变流器。
28.进一步优选地,机侧变流器采用转速外环、电流内环的双环控制和零d轴 电流矢
量控制的方法,包括以下步骤:
29.将当前状态下恒励磁机组的实际转速与恒励磁机组的转速参考值作差,获 取转速误差;
30.转速误差经过pi调节获取机侧变流器q轴的电流参考值i
sq
*,并设置机侧 d轴的电流参考值为0;
31.将机侧变流器输入端口测得的三相电流经派克变换后得到机侧变流器dq 轴的实际电流;
32.将机侧变流器d轴的电流参考值与实际电流作差,获取机侧变流器d轴电 流误差;
33.将机侧变流器q轴的电流参考值与实际电流作差,获取机侧变流器q轴电 流误差;
34.将机侧变流器dq轴电流误差经pi调节后经svpwm产生机侧脉冲调制信 号传送至机侧变流器。
35.进一步优选地,步骤(3)中所述恒励磁机组的附加功率的表达式为:
[0036][0037]
其中,te为恒励磁机组的电磁转矩;n
p
为恒励磁机组极对数; ψ0为恒励磁机组的定子磁链;ω和ω
ref
分别为当前状态下所述独立电力系统的实 际电角速度和独立电力系统的电角速度参考值;k1为权重因子;ωm为恒励磁机 组转子的实际转速;i
sq
为机侧变流器q轴实际电流。
[0038]
进一步优选地,步骤(4)具体包括如下步骤:
[0039]
基于恒励磁机组的附加功率、转动惯量以及上一时刻的恒励磁机组的实际 转速,计算恒励磁机组的转速释放量;
[0040]
将恒励磁机组的转速释放量叠加至恒励磁机组的转速参考值,对恒励磁机 组的实际转速进行调节;
[0041]
其中,转速释放量为:
[0042][0043]
δω
′
为恒励磁机组的转速释放量;ω
gref
为上一时刻恒励磁机组的实际转速; j为转动惯量;δp为恒励磁机组的附加功率;t0为上一时刻;t1为当前时刻。
[0044]
另一方面,本发明提供了一种基于协同控制的独立电力系统频率的控制系 统,包括:恒励磁机组,其通过背靠背变流器并入独立电力系统中;实现在系 统发生扰动时快速释放转子动能,弥补系统瞬时功率差额;
[0045]
背靠背变流器,包括机侧变流器和网侧变流器;其中,机侧变流器用于控 制恒励磁机组的输出功率;网侧变流器用于直流侧直流母线电压稳定,同时控 制机侧变流器功率向网侧传输;
[0046]
频率优化控制器,用于获取附加功率;其中,附加功率的获取方法为:基 于协同控制,根据当前状态下所述独立电力系统的实际电角速度、独立电力系 统的电角速度参考值、恒励磁机组转子的实际转速、恒励磁机组的极对数、恒 励磁机组的定子磁链和机侧变
流器q轴实际电流,获取恒励磁机组的附加功率; 基于恒励磁机组的附加功率、转动惯量以及上一时刻的恒励磁机组的实际转速, 获取恒励磁机组的转速参考值;
[0047]
死区控制模块,其输入端连接频率优化控制器的输出端,用于当独立电力 系统内发生阶跃性负荷波动时,将独立电力系统的实际频率与参考频率作差, 获取的频率误差;当频率误差超过死区控制范围时,驱动频率优化控制器;
[0048]
转速保护模块,用于在驱动频率优化控制器运行时判断恒励磁机组的转速 标幺值是否在预设范围,当恒励磁机组的转速标幺值不在预设范围时,则停止 驱动频率优化控制器;
[0049]
自动发电控制模块(agc),用于将频率差值经pi控制获取独立电力系统的 功率差额,并将功率差额按比例分配至各机组;将各机组分配到的功率差额叠 加至机组给定输入指令,调节各机组中汽轮机的给定功率参考值。
[0050]
进一步优选地,恒励磁机组为独立电力系统中任一火电机组改造;
[0051]
网侧变流器通过采用电压外环和电流内环的双环控制,用于直流侧直流母线 电压稳定,同时控制机侧变流器功率向网侧传输;
[0052]
机侧变流器通过采用转速外环、电流内环的双环控制和零d轴电流矢量控制, 用于控制恒励磁机组的输出功率。
[0053]
进一步优选地,网侧变流器采用电压外环和电流内环的双环控制,包括以 下步骤:
[0054]
将测量的直流母线电压和直流母线电压参考值作差,获取直流母线电压误 差;
[0055]
将直流母线电压误差经pi调节后输出网侧变流器d轴的电流参考值,并设 置网侧变流器q轴的电流参考值为0;
[0056]
将网侧变流器输出端口三相电流经派克变换后得到网侧变流器dq轴的实 际电流;
[0057]
将网侧变流器d轴的电流参考值与实际电流作差,获取网侧变流器d轴电 流误差;
[0058]
将网侧变流器q轴的电流参考值与实际电流作差,获取网侧变流器q轴电 流误差;
[0059]
将网侧变流器dq轴电流误差经pi调节后,再经svpwm产生网侧脉冲调 制信号传送至网侧变流器。
[0060]
优选地,机侧变流器采用转速外环、电流内环的双环控制和零d轴电流矢 量控制的方法,包括以下步骤:
[0061]
将当前状态下恒励磁机组的实际转速与恒励磁机组的转速参考值作差,获 取转速误差;
[0062]
转速误差经过pi调节获取机侧变流器q轴的电流参考值i
sq
*,并设置机侧 d轴的电流参考值为0;
[0063]
将机侧变流器输入端口测得的三相电流经派克变换后得到机侧变流器dq 轴的实际电流;
[0064]
将机侧变流器d轴的电流参考值与实际电流作差,获取机侧变流器d轴电 流误差;
[0065]
将机侧变流器q轴的电流参考值与实际电流作差,获取机侧变流器q轴电 流误差;
[0066]
将机侧变流器dq轴电流误差经pi调节后,再经svpwm产生机侧脉冲调 制信号传送至机侧变流器。
[0067]
优选地,恒励磁机组的附加功率的表达式为:
[0068][0069]
其中,te为恒励磁机组的电磁转矩;n
p
为恒励磁极对数;ψ0为恒励磁机组的定子磁链;ω和ω
ref
分别为当前状态下所述独立电力系统的实际 电角速度和独立电力系统的电角速度参考值;k1为权重因子;ωm为恒励磁机组 转子的实际转速;i
sq
为机侧变流器q轴实际电流。进一步优选地,转速释放量 为:
[0070][0071]
其中,δω
′
为恒励磁机组的转速释放量;ω
gref
为上一时刻恒励磁机组的实际 转速;j为转动惯量;δp为恒励磁机组的附加功率;t0为上一时刻;t1为当前 时刻。
[0072]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下 有益效果:
[0073]
本发明将一台常规火电机组改造为恒励磁机组,实现机组变速恒频控制, 通过背靠背变流器与电网并联运行,通过协同控制原理构建辅助控制器,并推 导调频机组转速变化与释放功率的关系(根据当前状态下所述独立电力系统的 实际电角速度、独立电力系统的电角速度参考值、恒励磁机组转子的实际转速、 恒励磁机组的极对数、恒励磁机组的定子磁链和机侧变流器q轴实际电流,获 取恒励磁机组的附加功率;基于恒励磁机组的附加功率、转动惯量以及上一时 刻的恒励磁机组的实际转速,通过调节恒励磁机组的转速参考值对所述恒励磁 机组的实际转速进行调节),提出直接控制快速调频机组转速的方法,避免了 固有速度控制与转子动能控制调频的矛盾,直接控制了转子动能的释放,可快 速响应系统频率变化达到稳定运行。
附图说明
[0074]
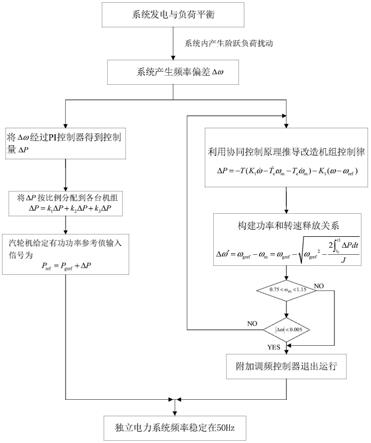
图1是本发明实施例提供的独立电力系统频率的控制方法流程图;
[0075]
图2是本发明实施例提供的独立电力系统结构示意图;
[0076]
图3是本发明实施例提供的改造后的vscf机组的拓扑结构示意图;
[0077]
图4是本发明实施例提供的改造后的变速恒频机组背靠背变流器机侧控制 示意图;
[0078]
图5是本发明实施例提供的改造后的变速恒频机组背靠背变流器网侧控制 示意图;
[0079]
图6是本发明实施例提供的基于协同控制的优化频率控制器示意图;
[0080]
图7是本发明实施例提供的汽轮机给定有功功率参考值控制示意图;
[0081]
图8是本发明实施例提供的常规发电机组的系统频率曲线与通过本实施例 获取的系统频率曲线的对比图;
[0082]
图9是本发明实施例提供的改造机组的输出功率、协同控制附加功率和改 造机组
转子转速随时间变化的示意图。
具体实施方式
[0083]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实 施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅 仅用以解释本发明,并不用于限定本发明。
[0084]
一方面,本发明提供了一种基于协同控制的独立电力系统频率的控制方法, 包括以下步骤:
[0085]
(1)监测独立电力系统是否发生阶跃性负荷波动,当独立电力系统内发生 阶跃性负荷波动时,转至步骤(2);
[0086]
(2)将独立电力系统的实际频率与参考频率作差,获取的频率误差;
[0087]
(3)当频率误差超过死区控制范围时同时进入步骤(4)和步骤(7),否 则只进入步骤(7);
[0088]
(4)基于协同控制,根据当前状态下所述独立电力系统的实际电角速度、 独立电力系统的电角速度参考值、恒励磁机组转子的实际转速、恒励磁机组的 极对数、恒励磁机组的定子磁链和机侧变流器q轴实际电流,获取恒励磁机组 的附加功率;
[0089]
(5)基于恒励磁机组的附加功率、转动惯量以及上一时刻的恒励磁机组的 实际转速,通过调节恒励磁机组的转速参考值对所述恒励磁机组的实际转速进 行调节;
[0090]
(6)重复步骤(2)~(5),直至恒励磁机组的转速标幺值不在预设范围 时,停止执行转子动能控制,等待独立电力系统处于稳态转至步骤(9);
[0091]
(7)将频率差值经pi控制获取独立电力系统的功率差额,并将功率差额 按比例分配至各机组;
[0092]
(8)将各机组分配到的功率差额叠加至机组给定输入指令,调节汽轮机的 给定功率参考值,直至独立电力系统处于稳态;
[0093]
(9)转至步骤(1),直至独立电力系统停止工作;
[0094]
其中,恒励磁机组通过背靠背变流器并入独立电力系统中;背靠背变流器 包括机侧变流器和网侧变流器;其中,机侧变流器用于控制恒励磁机组的输出 功率;网侧变流器用于直流侧直流母线电压稳定,同时控制机侧变流器功率向 网侧传输。
[0095]
进一步优选地,将恒励磁机组接入独立电力系统的方法,包括以下步骤:
[0096]
s1:选取独立电力系统中的任一火电机组改造为恒励磁机组;
[0097]
s2:对网侧变流器采用电压外环和电流内环的双环控制;且对机侧变流器采 用转速外环、电流内环的双环控制和零d轴电流矢量控制;
[0098]
s3:采用经过s2处理的所述网侧变流器和所述机侧变流器构建背靠背变流 器,将所述恒励磁机组通过所述背靠背变流器并入独立电力系统中。
[0099]
进一步优选地,网侧变流器采用电压外环和电流内环的双环控制包括以下 步骤:
[0100]
将测量的直流母线电压和直流母线电压参考值作差,获取直流母线电压误 差;
[0101]
将直流母线电压误差经pi调节后输出网侧变流器d轴的电流参考值,并设 置网侧变流器q轴的电流参考值为0;
[0102]
将网侧变流器输出端口三相电流经派克变换后得到网侧变流器dq轴的实 际电
流;
[0103]
将网侧变流器d轴的电流参考值与实际电流作差,获取网侧变流器d轴电 流误差;
[0104]
将网侧变流器q轴的电流参考值与实际电流作差,获取网侧变流器q轴电 流误差;
[0105]
将网侧变流器dq轴电流误差经pi调节后经svpwm产生网侧脉冲调制信 号传送至网侧变流器。
[0106]
进一步优选地,机侧变流器采用转速外环、电流内环的双环控制和零d轴 电流矢量控制的方法,包括以下步骤:
[0107]
将当前状态下恒励磁机组的实际转速与恒励磁机组的转速参考值作差,获 取转速误差;
[0108]
转速误差经过pi调节获取机侧变流器q轴的电流参考值i
sq
*,并设置机侧 d轴的电流参考值为0;
[0109]
将机侧变流器输入端口测得的三相电流经派克变换后得到机侧变流器dq 轴的实际电流;
[0110]
将机侧变流器d轴的电流参考值与实际电流作差,获取机侧变流器d轴电 流误差;
[0111]
将机侧变流器q轴的电流参考值与实际电流作差,获取机侧变流器q轴电 流误差;
[0112]
将机侧变流器dq轴电流误差经pi调节后经svpwm产生机侧脉冲调制信 号传送至机侧变流器。进一步优选地,步骤(3)中所述恒励磁机组的附加功率 的表达式为:
[0113][0114]
其中,te为恒励磁机组的电磁转矩;n
p
为恒励磁极对数;ψ0为恒励磁机组的定子磁链;ω和ω
ref
分别为当前状态下所述独立电力系统的实际 电角速度和独立电力系统的电角速度参考值;k1为权重因子;ωm为恒励磁机组 转子的实际转速;i
sq
为机侧变流器q轴实际电流。
[0115]
进一步优选地,步骤(4)具体包括如下步骤:
[0116]
基于恒励磁机组的附加功率、转动惯量以及上一时刻的恒励磁机组的实际 转速,计算恒励磁机组的转速释放量;
[0117]
将恒励磁机组的转速释放量叠加至恒励磁机组的转速参考值,对恒励磁机 组的实际转速进行调节;
[0118]
其中,所述转速释放量为:
[0119][0120]
δω
′
为恒励磁机组的转速释放量;ω
gref
为上一时刻恒励磁机组的实际转速; j为转动惯量;δp为恒励磁机组的附加功率;t0为上一时刻;t1为当前时刻。
[0121]
另一方面,本发明提供了一种基于协同控制的独立电力系统频率的控制系 统,包括:恒励磁机组,其通过背靠背变流器并入所述独立电力系统中;实现 在系统发生扰动时快速释放转子动能,弥补系统瞬时功率差额
[0122]
背靠背变流器,包括机侧变流器和网侧变流器;其中,机侧变流器用于控 制恒励磁机组的输出功率;网侧变流器用于直流侧直流母线电压稳定,同时控 制机侧变流器功率向网侧传输;
[0123]
频率优化控制器,用于获取附加功率,其中,附加功率的获取方法为:基 于协同控制,根据当前状态下所述独立电力系统的实际电角速度、独立电力系 统的电角速度参考值、恒励磁机组转子的实际转速、恒励磁机组的极对数、恒 励磁机组的定子磁链和机侧变流器q轴实际电流,获取恒励磁机组的附加功率; 基于恒励磁机组的附加功率、转动惯量以及上一时刻的恒励磁机组的实际转速, 获取恒励磁机组的转速参考值;
[0124]
死区控制模块,其输入端连接频率优化控制器的输出端,用于当独立电力 系统内发生阶跃性负荷波动时,将独立电力系统的实际频率与参考频率作差, 获取频率误差;当频率误差超过死区控制范围时,驱动频率优化控制器;
[0125]
转速保护模块,用于在驱动频率优化控制器运行时判断恒励磁机组的转速 标幺值是否在预设范围,当恒励磁机组的转速标幺值不在预设范围时,则停止 驱动频率优化控制器;
[0126]
自动发电控制模块agc,用于将频率差值经pi控制获取独立电力系统的 功率差额,并将功率差额按比例分配至各机组;将各机组分配到的功率差额叠 加至机组给定输入指令,调节各机组中汽轮机的给定功率参考值。
[0127]
进一步优选地,恒励磁机组为独立电力系统中任一火电机组改造;
[0128]
网侧变流器通过采用电压外环和电流内环的双环控制,用于直流侧直流母 线电压稳定,同时控制机侧变流器功率向网侧传输;
[0129]
机侧变流器通过采用转速外环、电流内环的双环控制和零d轴电流矢量控 制,用于控制恒励磁机组的输出功率。
[0130]
进一步优选地,网侧变流器采用电压外环和电流内环的双环控制,包括以 下步骤:
[0131]
将测量的直流母线电压和直流母线电压参考值作差,获取直流母线电压误 差;
[0132]
将直流母线电压误差经pi调节后输出网侧变流器d轴的电流参考值,并设 置网侧变流器q轴的电流参考值为0;
[0133]
将网侧变流器输出端口三相电流经派克变换后得到网侧变流器dq轴的实 际电流;
[0134]
将网侧变流器d轴的电流参考值与实际电流作差,获取网侧变流器d轴电 流误差;
[0135]
将网侧变流器q轴的电流参考值与实际电流作差,获取网侧变流器q轴电 流误差;
[0136]
将网侧变流器dq轴电流误差经pi调节后,再经svpwm产生网侧脉冲调 制信号传送至网侧变流器。
[0137]
优选地,机侧变流器采用转速外环、电流内环的双环控制和零d轴电流矢 量控制的方法,包括以下步骤:
[0138]
将当前状态下恒励磁机组的实际转速与恒励磁机组的转速参考值作差,获 取转速误差;
[0139]
转速误差经过pi调节获取机侧变流器q轴的电流参考值i
sq
*,并设置机侧 d轴的电流参考值为0;
[0140]
将机侧变流器输入端口测得的三相电流经派克变换后得到机侧变流器dq 轴的实际电流;
[0141]
将机侧变流器d轴的电流参考值与实际电流作差,获取机侧变流器d轴电 流误差;
[0142]
将机侧变流器q轴的电流参考值与实际电流作差,获取机侧变流器q轴电 流误差;
[0143]
将机侧变流器dq轴电流误差经pi调节后,再经svpwm产生机侧脉冲调 制信号传送至机侧变流器。
[0144]
优选地,恒励磁机组的附加功率的表达式为:
[0145][0146]
其中,te为恒励磁机组的电磁转矩;n
p
为恒励磁极对数;ψ0为恒励磁机组的定子磁链;ω和ω
ref
分别为当前状态下所述独立电力系统的实际 电角速度和独立电力系统的电角速度参考值;k1为权重因子;ωm为恒励磁机组 转子的实际转速;i
sq
为机侧变流器q轴实际电流。进一步优选地,转速释放量 为:
[0147][0148]
其中,δω
′
为恒励磁机组的转速释放量;ω
gref
为上一时刻恒励磁机组的实际 转速;j为转动惯量;δp为恒励磁机组的附加功率;t0为上一时刻;t1为当前 时刻。
[0149]
实施例1
[0150]
本发明提供了一种基于协同控制的独立电力系统频率的控制方法,包括以 下步骤:
[0151]
阶段一:系统的构建
[0152]
步骤1:选取独立电力系统中闲置或淘汰的机组改造为恒励磁机组,作为 系统的快速调频机组,并通过背靠背变流器与系统并联,本实施例中选取1.5mw容量的常规发电机组;其中,背靠背变流器包括机侧变流器和网侧变流 器;
[0153]
阶段二:网侧变流器采用电压外环、电流内环的双环控制
[0154]
步骤2:将测量的直流母线电压u
dc
和直流母线电压参考值u
dc
*比较,直流 母线电压误差经pi调节后输出为网侧变流器d轴电流参考值i
gd
*;并设置网侧 变流器q轴电流参考值i
gq
*为0;
[0155]
步骤3:将网侧变流器输出端口三相电流经派克变换后得到dq轴的实际电 流i
gd
和i
gq
,与步骤2中的dq轴电流参考值比较,得到网侧变流器电流误差经 pi调节后作用于svpwm调制模块,将网侧脉冲调制信号传送至网侧变流器;
[0156]
步骤2和步骤3的目的是为了直流侧直流母线电压稳定,同时为了控制机 侧变流器功率向网侧传输;
[0157]
阶段三:机侧变流器采用转速外环、电流内环的双环控制和零d轴电流矢 量控制
[0158]
步骤4:通过位置速度传感器测量得到恒励磁机组转子的实际转速ωm,与 恒励磁机组转子的转速参考值ω
mref
比较,转速误差经过pi调节器输送给机侧 变流器作为q轴的
电流参考值i
sq
*;并设置机侧d轴电流参考值i
sd
*为0;
[0159]
步骤5:将机侧变流器输入端口测得的三相电流经派克变换后得到dq轴的 实际电流i
sd
和i
sq
,与步骤4中得到的dq轴电流参考值比较,得到误差经pi调 节后作用于svpwm调制模块,将机侧脉冲调制信号传送至机侧变流器;
[0160]
步骤4和步骤5是为了控制恒励磁机组的输出功率;
[0161]
步骤6:将改造的励磁机组通过背靠背变流器并入10kv的独立电力系统中;
[0162]
阶段四:频率优化控制器的构建
[0163]
步骤7:当独立电力系统内发生阶跃性负荷波动时,独立电力系统频率快 速变化,将实时采集独立电力系统的实际频率f与参考频率f
ref
做差,得到频率 误差经pi控制器调节得到独立电力系统的功率差额,将其按比例分配到各台机 组,所用公式如下:
[0164]
δp
gl
=k1δp
gl
+k2δp
gl
+k3δp
gl
[0165]
其中,δp
gl
为功率差额;k1,k2和k3分别为机组分配比例的系数;
[0166]
步骤8:将步骤7计算的功率差额控制δp叠加到机组给定输入指令p
gref
, 共同输入到汽轮机的给定功率参考值信号上,所用公式为:
[0167]
p
t_ref
=p
gref
+δp
[0168]
其中,p
t_ref
为汽轮机的给定功率参考值;
[0169]
步骤8是通过控制汽轮机的给定功率参考值调节功率差额,但是实际应用 中往往存在控制时间的延迟,因此,当需要进行附加调频方法,步骤8与步骤 14同时进行;
[0170]
步骤9:将步骤7得到的频率误差经过死区控制,死区频率偏差控制范围 设置为0.005,频率误差超过死区控制范围时,基于协同控制的附加调频方法将 会立即动作;
[0171]
步骤10:设计基于协同控制原理的频率优化控制器;针对独立电力系统中 负责快速调频的恒励磁机组构建宏变量如下:
[0172]
ψ=k1(ω-ω
ref
)-(p
e-p
ref
)
[0173]
其中,k1为权重因子;ω为独立电力系统当前运行状态下的实际电角速度; ω
ref
为独立电力系统的电角速度参考值;pe为恒励磁机组的输出功率;p
ref
为恒 励磁机组参考功率;ψ为宏变量;
[0174]
步骤11:依据步骤10设计的宏变量,构建流形如下:
[0175][0176]
其中,t为时间常数;pe=teωm,对pe求导得:te为恒励磁 机组的电磁转矩;
[0177]
其中,p
ref
=p
′
ref
+δp;p
′
ref
为改造机组下垂控制参考功率;δp为附加功率;
[0178]
步骤12:由步骤11推导构建改造机组(恒励磁机组)得控制律如下:
[0179][0180]
根据辅助频率优化控制器特点,在稳态运行状态下,δp=0;
[0181]
上式化简如下:
[0182]
[0183]
其中,te不易直接获得,表达式为:n
p
为改造机组极对数;ψ0为恒励磁机组的定子磁链;
[0184]
阶段五:频率优化控制器的优化
[0185]
步骤13:改造机组转子动能控制表现为附加功率形式,实际释放的转子动 能来自于转速的改变,计算转子拥有动能大小如下:
[0186][0187]
其中,j为转动惯量;ω为恒励磁机组的转速;
[0188]
转子释放动能大小:
[0189][0190]
其中,ω
gref
为恒励磁机组的上一时刻的转子转速;
[0191]
步骤14:分析改造机组参与独立电力系统快速调频时转子动能与转速变化 关系,在改造机组参与调频时间t内,附加功率和释放转子动能有如下关系:
[0192][0193]
由上式得:
[0194]
可构建附加功率和转速释放量关系如下:
[0195][0196]
步骤15:将步骤14分析得到的δω
′
叠加到步骤4中的转速参考值,当转速 标幺值范围在0.75-1.15之间时,允许协同控制附加调频控制器参与调节,当转 速标幺值低于0.75或高于1.15时,附加调频控制器退出控制;
[0197]
步骤16:当附加调频控制器退出控制后,此时独立电力系统其它常规火电 机组的汽轮机调速阀门开度增加,步骤8增发功率发挥作用,最终将系统频率 控制在稳定状态。
[0198]
实施例2
[0199]
根据上述技术方案实施步骤,提出两种仿真对比方案:
[0200]
(1)常规的系统频率控制仿真方案:搭建独立电力系统仿真模型,做系统 内负荷阶跃扰动下的系统频率控制的效果,其中各台发电机组选用常规同步发 电机组,并设置将频率误差信号经pi调节后叠加在汽轮机有功功率参考输入指 令值上,增加机组出力,控制系统频率稳定。
[0201]
(2)本发明提出的控制仿真方案:搭建独立电力系统仿真模型,做系统内 负荷阶跃扰动下的系统频率控制的效果,将其中一台机组替换为改造的变速恒 频机组,其他机组
选用常规同步发电机组。改造机组控制中加入基于协同控制 原理的频率优化控制器,其他组采用传统控制手段。设置将频率误差信号经pi 调节后叠加在汽轮机有功功率参考输入指令值上,增加机组出力,控制系统频 率最终稳定。
[0202]
下面结合实施例,对本发明进行进一步详细说明。
[0203]
为了验证本发明正确性,在matlab/simulink仿真平台搭建独立电力系统 频率控制模型,其中,独立电力系统电路模型如图2所示,其中,g1和g2为 常规同步发电机组;pl1为阶跃负荷;pl2和pl3为恒定负荷;改造机组拓扑结 果如图3所示搭建;改造机组背靠背变流器控制如图4和图5所示搭建;变速 恒频机组基于协同控制的调频控制方法按照图6所示搭建;汽轮机给定有功功 率参考值控制如图7所示搭建;仿真内容首先对常规同步发电机组响应负荷扰 动后频率变化进行分析,再进行基于协同控制的改造变速恒频机组响应负荷扰 动后频率变化的分析,对两者进行对比分析,得出结论;
[0204]
如图8所示,仿真场景设置为:负荷初值设置为9mw,正常运行时系统 发电机组总输出功率为9mw,此时系统频率稳定在50hz,在仿真15s时,模 拟系统频率瞬间下降,经过0.9s下降至最低点49.61,然后常规机组汽轮机相 应系统频率变化开始增发功率,历时9s后将系统频率调节稳定;相比于传统控 制方案本发明在15s负荷突增1.5mw时,基于协同控制的频率优化控制器快速 动作,释放变速恒频机组的转子动能,快速响应系统频率变化,并抑制系统频 率的继续恶化,最终历时6s后系统频率调节稳定,效果明显好于传统控制方案。
[0205]
图9为本发明实施例中改造机组的输出功率、协同控制附加功率、改造机 组转子转速随时间变化图,当在仿真15s时系统内负荷突增1.5mw,此时基于 协同控制的优化频率控制器工作,输出附加功率随频率误差增加逐渐增加到最 大,附加功率随转子动能转化为电能,并没有超过转速限制范围,通过分析改 造机组的输出功率图,负荷波动时,输出功率瞬时增大,补足功率差额,避免 频率过于恶化。
[0206]
仿真结果表明,通过设计基于协同控制的优化频率控制器对系统频率的控 制具有快速性和有效性,也说明本发明提出的直接控制快速调频机组转速的方 法和合理性以及可靠性。
[0207]
本发明与现有技术相比,存在以下优势:
[0208]
本发明将常规火电机组改造为恒励磁机组,实现机组变速恒频控制,通过 背靠背变流器与电网并联运行,通过协同控制原理构建辅助控制器,并推导调 频机组转速变化与释放功率的关系(根据当前状态下所述独立电力系统的实际 电角速度、独立电力系统的电角速度参考值、恒励磁机组转子的实际转速、恒 励磁机组的极对数、恒励磁机组的定子磁链和机侧变流器q轴实际电流,获取 恒励磁机组的附加功率;基于恒励磁机组的附加功率、转动惯量以及上一时刻 的恒励磁机组的实际转速,通过调节恒励磁机组的转速参考值对所述恒励磁机 组的实际转速进行调节),提出直接控制快速调频机组转速的方法,避免了固 有速度控制与转子动能控制调频的矛盾,直接控制了转子动能的释放,可快速 响应系统频率变化达到稳定运行。
[0209]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并 不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换 和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1