一种三相全桥逆变器的离散控制方法及装置
1.本发明属于三相交流电源技术领域,具体的说是涉及一种三相全桥逆变器的离散控制方法及装置。
背景技术:
2.基于三相全桥逆变器具有电压、电流应力低、功率密度大的优点,因此被广泛应用于独立单相及三相负载供电的三相不间断供电电源、交流异步电机及永磁同步电机交-直-交通用变频器、电力系统静止无功补偿装置、三相有源电力滤波装置等大功率电力工业场合。这些应用场合要求三相全桥逆变电源具有良好的稳态性能、快速的输入及负载动态性能,且具备调频调压功能。
3.三相全桥逆变器的控制策略,按照其实现控制方式的坐标系可以分为以下两类:
4.第一类是静止坐标系控制方式,即在a-b-c三相静止坐标系或α-β两相静止坐标系下实现控制目标。其优点为:控制系统无须软件锁相环(及旋转坐标变换环节,实现简单,软件成本较低,采用传统的比例-积分(pi)控制器可以实现宽频控制性能,采用传统的比例-谐振(pr)控制器或准比例-谐振控制器(q-pr)可以实现在交流控制系统下的无静差控制性能。其缺点为:由于pi控制器中积分补偿环节的影响,采用传统的pi控制在三相交流控制系统中存在控制静差;(见文献
①
:l.huber,m.kumarandm.m."implementationandperformancecomparisonoffivedsp-basedcontrolmethodsforthree-phasesix-switchboostpfcrectifier",2015ieeeappliedpowerelectronicsconferenceandexposition(apec),pp.101-108,2015.)由于pr控制器中谐振频率参数ωr的影响,在交流系统被控对象角频率ω与pr控制器谐振频率参数ωr发生频率偏移时控制器增益及控制性能下降,因此多频率控制只能通过多pr控制器实现,增加了系统的实现复杂程度;(见文献
②
:i.etxeberria-otadui,a.l.deheredia,h.gaztaaga,s.bachaandm.r.reyero,"asinglesynchronousframehybrid(ssfh)multifrequencycontrollerforpoweractivefilters",ieeetrans.ind.electron.,vol.53,no.5,pp.1640-1648,oct.2006;文献
③
:m.liserre,r.teodorescu,andf.blaabjerg,"multipleharmonicscontrolforthree-phasegridconvertersystemswiththeuseofpi-rescurrentcontrollerinarotatingframe",ieeetrans.powerelectron.,vol.21,pp.836-841,may2006.)q-pr控制器在pr控制器的基础上引入控制参数截止频率ωc,以提高频率偏移时的控制性能,但是其控制器传递函数、参数整定过程与传统的pr控制器相比均相对复杂,且控制器的频率带宽会受到截止频率参数ωc的限制。(见文献
④
:p.chenandf.wu,"researchandimplementationofsingle-phaseacelectronicloadbasedonquasi-prcontrol",2018internationalconferenceonadvancedmechatronicsystems(icamechs),pp.157-161,2018.)
5.第二类是旋转坐标系控制方式,即在d-q两相旋转坐标系下实现控制目标。其优点为:在旋转坐标系下,控制目标由交流量转化为直流量,因此使用传统的pi控制器可以实
现无 静差控制。其缺点为:控制系统中需要pll模块及旋转坐标变换模块,增大控制运算量及 软件成本;控制系统依赖pll模块,因此只能实现定频率控制,不能用于需要频率调节的 三相逆变变频电源应用场合。(见文献
⑤
:z.shuai,y.li,w.wu,c.tu,a.luo and z.j.shen, "divided dq small-signal model:a new perspective for the stability analysis of three-phase grid-tiedinverters",ieee trans.ind.electron.,vol.66,no.8,pp.6493-6504,sep.2019)。
技术实现要素:
6.针对上述问题,本发明提出了一种适用于三相全桥逆变器的离散控制方法及装置,以对 背景叙述中所述传统控制策略进行性能优化。
7.本发明的技术方案为:
8.一种三相全桥逆变器的离散控制方法,包括以下步骤:
9.s1、设定第k个开关周期三相负载电压的给定值分别为u
ar*
(k)、u
br*
(k)、u
cr*
(k);
10.s2、在第k个开关周期的起始时刻t,通过采样获得三相全桥逆变器的输入母线电容电 压u
dc
(t)、三相负载电压u
ar
(t)、u
br
(t)、u
cr
(t)及三相负载电流i
ar
(t)、i
br
(t)、i
cr
(t)信号,并将上 述信号经a/d转换模块获得对应的数字信号u
dc
(k)、u
ar
(k)、u
br
(k)、u
cr
(k)、i
ar
(k)、i
br
(k)、 i
cr
(k);
11.s3、根据步骤s1和s2的数据,计算下一个开关周期的三相ph占空比d
ah
(k+1)、 d
bh
(k+1)、d
ch
(k+1)及三相p
l
占空比d
al
(k+1)、d
bl
(k+1)、d
cl
(k+1),具体为:
[0012][0013][0014]
其中
[0015]
[0016][0017]
ω为系统三相基波角频率,l和c为三相全桥逆变器的lc滤波参数,负载电流i
αr
(k)和 i
βr
(k)由三相负载电流i
ar
(k)、i
br
(k)、i
cr
(k)经过3s-2s坐标变换获得:
[0018][0019]
s4、将u
ar
(k)、u
br
(k)、u
cr
(k)与u
ar*
(k)、u
br*
(k)、u
cr*
(k)进行比较,根据控制规则,在步 骤s3中产生的三相ph、三相p
l
占空比中选择并产生下一个开关周期的三相占空比 da(k+1)、db(k+1)、dc(k+1);所述控制规则为:当a相负载电压反馈值u
ar
(k)小于a相负 载电压设定值u
ar*
(k)时,下一个开关周期的a相占空比为da(k+1)=d
ah
(k+1);当a相负载 电压反馈值u
ar
(k)大于a相负载电压设定值u
ar*
(k)时,下一个开关周期的a相占空比为 da(k+1)=d
al
(k+1),b和c相静止坐标系中的最终占空比db(k+1)和dc(k+1)产生规则与a 相静止坐标系同理;
[0020]
s5、根据得到的三相占空比da(k+1)、db(k+1)、dc(k+1)生成对应的三相控制信号 sa(k+1)、sb(k+1)、sc(k+1),通过对三相全桥逆变器功率器件的控制,实现对三相负载电压 的控制。
[0021]
一种三相全桥逆变器的离散控制装置,包括三相全桥逆变器、离散控制器,所述离散控 制器包括电压电流采样及a/d转换模块、占空比计算模块、占空比选择模块、dpwm及驱 动模块;
[0022]
所述电压电流采样及a/d转换模块用于在第k个开关周期的起始时刻,采样三相全桥逆 变器的输入母线电容电压u
dc
(t),三相负载电压u
ar
(t)、u
br
(t)、u
cr
(t),三相负载电流i
ar
(t)、i
br
(t)、 i
cr
(t)信号,并将上述信号经a/d转换模块获得对应的数字信号u
dc
(k)、u
ar
(k)、u
br
(k)、u
cr
(k)、 i
ar
(k)、i
br
(k)、i
cr
(k),将得到的数字信号输出到占空比计算模块;
[0023]
所述占空比计算模块用于根据收到的数据计算下一个开关周期的三相ph占空比 d
ah
(k+1)、d
bh
(k+1)、d
ch
(k+1)及三相p
l
占空比d
al
(k+1)、d
bl
(k+1)、d
cl
(k+1),具体为:
[0024]
[0025][0026]
其中
[0027][0028][0029]uar*
(k)、u
br*
(k)、u
cr*
(k)为第k个开关周期三相负载电压的设定值,第ω为系统三相基波角 频率,l和c为三相全桥逆变器的lc滤波参数,负载电流i
αr
(k)和i
βr
(k)由三相负载电流 i
ar
(k)、i
br
(k)、i
cr
(k)经过3s-2s坐标变换获得:
[0030][0031]
占空比计算模块将得到的三相ph占空比d
ah
(k+1)、d
bh
(k+1)、d
ch
(k+1)及三相p
l
占空比 d
al
(k+1)、d
bl
(k+1)、d
cl
(k+1)输出到占空比选择模块;
[0032]
所述占空比选择模块根据设定值u
ar*
(k)、u
br*
(k)、u
cr*
(k)与反馈值u
ar
(k)、u
br
(k)、u
cr
(k)之间的 关系,在三相ph占空比及三相p
l
占空比中,选择下一个开关周期的三相占空比da(k+1)、 db(k+1)、dc(k+1),具体为:当a相负载电压反馈值u
ar
(k)小于a相负载电压设定值u
ar*
(k) 时,下一个开关周期的a相占空比为da(k+1)=d
ah
(k+1);当a相负载电压反馈值u
ar
(k)大 于a相负载电压设定值u
ar*
(k)时,下一个开关周期的a相占空比为da(k+1)=d
al
(k+1),b 和c相静止坐标系中的最终占空比db(k+1)和dc(k+1)产生规则与a相静止坐标系同理;占 空比选择模块将得到的三相占空比输出到dpwm及驱动模块;
[0033]
所述dpwm及驱动模块根据收到的三相占空比,生成所述三相全桥逆变器的三相控制 信号sa(k+1)、sb(k+1)、sc(k+1),用于驱动三相全桥逆变器的功率器件,以实现对变换器三相 负载电压的控制。
[0034]
本发明的有益效果为:
[0035]
1.与传统两相旋转坐标系-三相全桥逆变器控制方法相比,本发明控制系统在静止坐标系 下实现,无须旋转坐标变换及pll环节,控制实现简单、控制成本低;
[0036]
2.与传统三相全桥逆变器电压-电流双闭环控制方法相比,本发明控制系统中只存在负载 电压控制环路,电压控制环路中无积分补偿环节即可实现对交流负载电压的良好控制性能, 无须复杂的控制参数整定工作;此外,无须电流环路及相应的控制器设计,控制器复杂度 低;
[0037]
3.与传统电压单闭环三相全桥逆变器控制方法相比,本发明在控制系统负载电压控制环 路中引入负载电流信息,可以实现:
①
在不同负载情况时,系统均具有良好的稳态控制性 能;
②
快速的负载动态控制性能;
[0038]
4.与传统的三相全桥逆变pr控制系统相比,本发明控制系统可以利用控制性能对基波 角频率参数ω的设置具有较高的容错性,实现一定频率范围内的宽频控制,可用于需要变压 /变频的三相逆变电源应用场合;此外,该离散控制方法对所述三相全桥逆变器系统中的l、 c滤波参数亦具有较高的容错性,控制系统的鲁棒性强,控制系统中无需参数辨识环节。
附图说明
[0039]
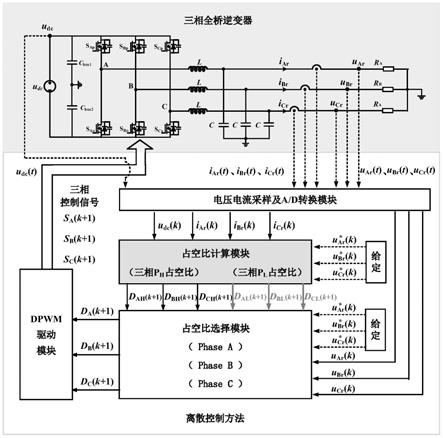
图1为本发明的三相逆变器的离散控制方法的结构示意图。
[0040]
图2为占空比计算模块的结构示意图。
[0041]
图3为实施例在三相全桥逆变器在满载工况时(三相输出有功功率po=1200w)三相负 载电压、电流及三相有功功率的稳态时域仿真波形图。
[0042]
图4为实施例的三相全桥逆变器在不同负载条件时(三相输出有功功率标幺值0.1p.u
‑ꢀ
1.0p.u)的三相负载电压仿真thd数据柱状图。
[0043]
图5为当输入电压发生突变时(直流输入电压在t=0.04s时从300v骤升至400v),本发 明控制三相全桥逆变器的三相负载电压、电流及直流输入电压时域仿真波形图。
[0044]
图6为当负载发生突变时(三相输出功率在t=0.04s时从600w骤升至1200w)本发明 控制三相全桥逆变器的三相负载电压、电流及三相有功功率时域仿真波形图及其动态细节波 形图。
[0045]
图7为本发明实施例的三相全桥逆变器在满载工况时(三相输出有功功率po=1200w), 当滤波参数设定值发生相对误差时的负载电压幅值控制误差数据折线图。
[0046]
图8为本发明实施例的三相全桥逆变器在满载工况时(三相输出有功功率po=1200w), 当滤波参数设定值发生相对误差时的负载电压相位控制误差数据折线图。
[0047]
图9为本发明实施例的三相全桥逆变器在半载工况时(三相输出有功功率po=600w), 当滤波参数设定值发生相对误差时的负载电压幅值控制误差数据折线图。
[0048]
图10为本发明实施例的三相全桥逆变器在半载工况时(三相输出有功功率po=600w), 当滤波参数设定值发生相对误差时的负载电压相位控制误差数据折线图。
[0049]
图11为实施例的三相全桥逆变器在满载工况时(三相输出有功功率po=1200w),当滤 波参数设定值相对误差为50%时的三相负载电压瞬时值、幅值及相位时域仿真波形图。
[0050]
图12为本发明实施例的三相全桥逆变器在满载工况时(三相输出有功功率 po=1200w),当基波角频率参数实际值与设定值(本发明实施例设置为ω=100πrad/s,对应频 率参数设置值为50hz)发生相对误差时的负载电压幅值误差数据折线图。
[0051]
图13为本发明实施例的三相全桥逆变器在满载工况时(三相输出有功功率 po=1200w),当基波角频率参数实际值与设定值(本发明实施例设置为ω=100πrad/s,对应频 率参数设置值为50hz)发生相对误差时的负载电压相位控制误差数据折线图。
[0052]
图14为本发明实施例的三相全桥逆变器在半载工况时(三相输出有功功率po=600w), 当基波角频率参数实际值与设定值(本发明实施例设置为ω=100πrad/s,对应频率参数设置 值为50hz)发生相对误差时的负载电压幅值控制误差数据折线图。
[0053]
图15为本发明实施例的三相全桥逆变器在半载工况时(三相输出有功功率po=600w), 当基波角频率参数实际值与设定值(本发明实施例设置为ω=100πrad/s,对应频率参数设置 值为50hz)发生相对误差时的负载电压相位控制误差数据折线图。
[0054]
图16为实施例的三相全桥逆变器在满载工况时(三相输出有功功率po=1200w),基波 频率参数设置值为50hz,实际值为10hz时的三相负载电压瞬时值、幅值及相位时域仿真波 形图。
[0055]
图17为实施例的三相全桥逆变器在满载工况时(三相输出有功功率po=1200w),基波 频率参数设置值为50hz,实际值为100hz时的三相负载电压瞬时值、幅值及相位时域仿真 波形图。
[0056]
图18为实施例的三相全桥逆变器在基波频率参数设置值为50hz条件时,负载电压给定 幅值0—110v、给定频率10—200hz的变压变频控制时的三相负载电压时域仿真波形图。
具体实施方式
[0057]
下面结合附图和实施例对本发明进行详细描述。
[0058]
如图1所示,为本发明所提供的一种适用于三相全桥逆变器的离散控制方法及装置包括 三相全桥逆变器及离散控制器,离散控制器包括:电压电流采样及a/d转换模块、占空比 计算模块、占空比选择模块、dpwm及驱动模块。
[0059]
如图2所示,上述控制器中的占空比计算模块包括:3s-2s坐标变换模块、占空比 d
ai
(k+1)-d
bi
(k+1)-d
ci
(k+1)计算模块、占空比d
aii
(k+1)-d
bii
(k+1)-d
cii
(k+1)计算模块、三相ph占空 比计算模块以及三相p
l
占空比计算模块。
[0060]
实现上述适用于三相全桥逆变器的离散控制方法的步骤为:
[0061]
步骤一,根据三相负载电压控制要求,设定第k个开关周期三相负载电压的给定值分别 为u
ar*
(k)、u
br*
(k)、u
cr*
(k);
[0062]
步骤二,在该开关周期的起始时刻,采样模块采样三相全桥逆变器的输入母线电容电压 u
dc
(t),三相负载电压u
ar
(t)、u
br
(t)、u
cr
(t)及三相负载电流i
ar
(t)、i
br
(t)、i
cr
(t)信号,并将上述信号 经a/d转换模块获得对应的数字信号u
dc
(k)、u
ar
(k)、u
br
(k)、u
cr
(k)、i
ar
(k)、i
br
(k)、i
cr
(k);
[0063]
步骤三,占空比计算模块计算下一个开关周期的三相ph占空比d
ah
(k+1)、d
bh
(k+1)、 d
ch
(k+1)及三相p
l
占空比d
al
(k+1)、d
bl
(k+1)、d
cl
(k+1);
[0064]
三相ph占空比d
ah
(k+1)、d
bh
(k+1)、d
ch
(k+1)和三相p
l
占空比d
al
(k+1)、d
bl
(k+1)、d
cl
(k+1) 的均包含两部分占空比:占空比d
ai
(k+1)、d
bi
(k+1)、d
ci
(k+1)和占空比d
aii
(k+1)、d
bii
(k+1)、 d
cii
(k+1),其中三相ph占空比分别为d
ah
(k+1)=d
ai
(k+1)+|d
aii
(k+1)|、d
bh
(k+1)=dbi
(k+1)+|d
bii
(k+1)| 和d
ch
(k+1)=d
ci
(k+1)+|d
cii
(k+1)|、三相p
l
占空比分别为d
ah
(k+1)=d
ai
(k+1)-|d
aii
(k+1)|、 d
bh
(k+1)=d
bi
(k+1)-|d
bii
(k+1)|和d
ch
(k+1)=d
ci
(k+1)-|d
cii
(k+1)|;
[0065]
占空比d
ai
(k+1)、d
bi
(k+1)、d
ci
(k+1)由输入母线电容电压u
dc
(k)、三相负载电压给定值为 u
ar*
(k)、u
br*
(k)、u
cr*
(k)计算获得,其计算公式如下:
[0066][0067]
其中,l和c为所述三相全桥逆变器的lc滤波参数,ω为系统三相基波角频率。
[0068]
占空比d
aii
(k+1)、d
bii
(k+1)、d
cii
(k+1)由输入母线电容电压u
dc
(k),三相负载电压u
ar
(k)、 u
br
(k)、u
cr
(k),α-β两相静止坐标系中负载电流i
αr
(k)、i
βr
(k),三相负载电流i
ar
(k)、i
br
(k)、i
cr
(k)获 得,其计算公式如下:
[0069][0070]
其中,i
αr
(k)和i
βr
(k)由三相负载电流i
ar
(k)、i
br
(k)、i
cr
(k)经过3s-2s坐标变换获得,其计算公式如 下:
[0071][0072]
综上所述,三相ph占空比可以由下式获得:
[0073][0074]
综上所述,三相p
l
占空比可以由下式获得:
[0075][0076]
占空比计算模块的输出端与占空比选择模块的输入端相连。
[0077]
步骤四,根据三相负载电压的给定值u
ar*
(k)、u
br*
(k)、u
cr*
(k)与反馈值u
ar
(k)、u
br
(k)、u
cr
(k)之 间的关系,占空比选择模块在三相ph占空比及三相p
l
占空比中,选择下一个开关周期的三 相占空比da(k+1)、db(k+1)、dc(k+1);
[0078]
步骤四中下一个开关周期的三相占空比da(k+1)、db(k+1)、dc(k+1)的产生规则如下:
[0079]
以a相为例说明,当a相负载电压反馈u
ar
(k)小于a相负载电压给定u
ar*
(k)时,下一个开 关周期的a相占空比da(k+1)=d
ah
(k+1);当a相负载电压反馈u
ar
(k)大于a相负载电压给定 u
ar*
(k)时,下一个开关周期的a相占空比da(k+1)=d
al
(k+1)。
[0080]
b和c相静止坐标系中下一个开关周期的占空比db(k+1)和dc(k+1)产生规则与a相静止 坐标系同理。
[0081]
步骤五,被选中的三相占空比经dpwm及驱动模块生成所述三相全桥逆变器的三相控 制信号sa(k+1)、sb(k+1)、sc(k+1)),用以驱动三相全桥逆变器的功率器件,实现对三相负载电 压的控制。
[0082]
采用本发明上述方案的实施例仿真结果如附图3—附图18所示。其中图3为本发明实 施例的三相全桥逆变器在满载稳态条件时的仿真结果。图4是本发明实施例的三相全桥逆变 器在不同负载稳态条件时的三相负载电压thd仿真结果。图5是本发明控制三相全桥逆变 器在输入电压发生变化时(直流输入电压在t=0.04s时从300v骤升至400v)的仿真结果。 图6是本发明控制三相全桥逆变器在负载发生变化时(三相负载功率在t=0.04s时从600w骤 升至1200w)的仿真结果。图7—图10是本发明实施例在半载及满载稳态条件时,滤波参 数发生相对误差时的负载电压控制性能仿真结果。图11是本发明实施例在满载条件时,滤 波参数相对误差为50%时的负载电压瞬时值、幅值及相位仿真结果。图12—图15是本发明 实施例在半载及满载稳态条件时,当基波角频率参数实际值与设定值(本发明实施例设置为 ω=100πrad/s,对应频率参数设置值为50hz)发生相对误差时的负载电压控制性能仿真结 果。图16是本发明实施例的三相全桥逆变器在基波频率参数设置值为50hz条件时,实际基 波频率为10hz时的负载电压瞬时值、幅值及相位仿真结果。图17是本发明实施例的三相全 桥逆变器在基波频率参数设置值为50hz条件时,实际基波频率为100hz时的负载电压瞬时 值、幅值及相位仿真结果。图18是本发明实施例的三相全桥逆变器在基波频率参数设置值 为50hz条件时,负载电压给定幅值0—110v、给定频率10—200hz的变压变频控制仿真结 果。
[0083]
图1中的三相全桥逆变器参数如下:开关频率设定值20khz,输入直流电压设定值 300v,额定负载电压幅值设定为110v,三相额定输出功率为1200w,三相输出滤波电感 l=2.5mh,三相输出滤波电容c=5.7uf,采用电力电子仿真软件plecs对本实施例控制方法 进行时域仿真,结果如下:图3为在满载稳态条件时(三相输出有功功率po=1200w)的三 相负载电压、负载电流以及有功功率波形,其中,三相负载电压的thd分别为:1.46%、 1.77%、1.83%,波形质量较好。
[0084]
图4为在不同负载稳态条件时(三相输出有功功率标幺值0.1.p.u-1.0.p.u,对应实际值为 po=600w~1200w)的三相负载电压仿真thd数据,三相负载电压的thd均被限制在2.5% 以下,说明采用本发明离散控制方法可在宽负载条件(10%满载—100%满载)下均获得波 形质量较高的三相输出电压。
[0085]
图5为在输入直流电压发生跳变时(直流输入电压在t=0.04s时从300v骤升至
400v) 的三相负载电压及直流输入电压波形,在t=0.04s时三相负载电压无明显动态过程,说明本 发明离散控制方法具有良好的输入动态性能。
[0086]
图6为在直流输入电压为300v时,负载功率发生跳变(三相负载输出功率在t=0.04s时 从600w骤升至1200w)的三相负载电压及三相输出有功功率波形,负载电压瞬时值跌落值 为25v(为负载电压幅值的23%),说明本发明离散控制方法具有良好的负载动态性能。
[0087]
图7—图8为在满载稳态条件时(三相输出有功功率po=1200w),滤波参数l和c的设 定值与实际值发生相对误差时的负载电压控制相对误差,其中:图7为幅值相对误差,幅值 相对误差绝对值最大值为0.006%;图8为相位相对误差,相位相对误差绝对值最大值为2.1 度,说明本发明离散控制方法对于滤波参数的设定具有较好的容错性即鲁棒性。
[0088]
图9—图10为在半载稳态条件时(三相输出有功功率po=600w),滤波参数l和c的设 定值与实际值发生相对误差时的负载电压控制相对误差,其中:图9为幅值相对误差,幅值 相对误差绝对值最大值为0.0089%;图10为相位相对误差,相位相对误差绝对值最大值为 1.06度,说明本发明离散控制方法对于滤波参数的设定具有较好的容错性即鲁棒性。
[0089]
综合图7—图10的仿真结果,说明本发明离散控制方法无需对滤波参数l和c进行参 数辨识工作。
[0090]
图11为在满载稳态条件时(三相输出有功功率po=1200w),滤波参数l和c的设定值 与实际值相对误差为50%时的仿真结果:三相负载电压波形质量良好,thd值分别为: 2.12%、2.25%和2.05%;负载电压幅值基本稳定在给定值110v。
[0091]
图12—图13为在满载稳态条件时(三相输出有功功率po=1200w),基波角频率参数实 际值与设定值(本发明实施例设置为ω=100πrad/s)发生相对误差时的负载电压控制误差, 其中:图12为幅值相对误差,幅值相对误差绝对值最大值为0.0092%;图13为相位相对误 差,相位相对误差绝对值最大值为3度,说明本发明离散控制方法对于基波角频率参数的设 定具有较好的容错性即鲁棒性。
[0092]
图14—图15为在半载稳态条件时(三相输出有功功率po=600w),基波角频率参数实 际值与设定值(本发明实施例设置为po=1200w)发生相对误差时的负载电压控制误差,其 中:图14为幅值相对误差,幅值相对误差绝对值最大值为0.009%;图15为相位相对误 差,相位相对误差绝对值最大值为1.51度,说明本发明离散控制方法对于基波角频率参数 的设定具有较好的容错性即鲁棒性。
[0093]
综合图12—图15的仿真结果,说明本发明离散控制方法无需对基波角频率参数ω进行 参数辨识工作,且可以实现一定频率范围内的宽频控制即变频控制。
[0094]
图16为在满载稳态条件时(三相输出有功功率po=1200w),基波频率参数设置值为 50hz,实际值为10hz时的仿真结果,其中:三相负载电压波形质量较好;负载电压幅值基 本稳定在给定值110v。
[0095]
图17为在满载稳态条件时(三相输出有功功率po=600w),基波频率参数设置值为 50hz,实际值为100hz时的仿真结果,其中:三相负载电压波形质量较好;负载电压幅值 基本稳定在给定值110v。
[0096]
图18为在基波频率参数设置值为50hz条件时,负载电压幅值为0-110v斜坡给定、频 率为10-220hz斜坡给定的变压变频控制时的仿真结果。三相负载电压波形质量较好;根
据 负载电压幅值波形,可知装置实现了0-110v范围的动态调压过程;根据负载电压相位波 形,可知装置实现了10-220hz范围内的动态调频过程。说明本发明离散控制方法可实现变 压变频控制,可以用于需要变压变频控制的三相逆变交流电源场合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1