无铁心电动机的制作方法
无铁心电动机
1.本技术是名称为“无铁心电动机”、国际申请日为2017年6月21日、国际申请号为pct/jp2017/022915、国家申请号为201780036093.5的发明专利申请的分案申请。
技术领域
2.本发明涉及无铁心电动机。特别是涉及在无铁心电动机的内部内置有减速器、制动器等各种单元的无铁心电动机。
背景技术:
3.以往,提出了将减速器、制动器等单元安装于在电动机的旋转轴上安装有驱动对象的一侧即旋转轴的输出侧、或者其相反侧等的方案。
4.例如,在专利文献4中,提出了在动力轴和与动力轴配置成同心圆状的转子之间配置行星辊机构的电动机的方案。
5.专利文献1~5是所谓的铁心型的电动机。以往,提出了在这种铁心型的电动机中将减速器等单元内置于电动机的内部的方案。
6.另一方面,以往未提出在作为无铁心型的电动机的无铁心电动机中将减速器等单元内置于内部的方案。
7.这是由于在无铁心电动机的情况下,一般是小型化的电动机,因此在电动机的内部内置减速器等单元本身是困难的。
8.专利文献6是与本案申请人提出的无铁心电动机相关的发明。作为旋转中心的中心轴在半径方向的中心延伸,在该中心轴延伸的方向上延伸的圆筒状的线圈相对于中心轴配置成同心圆状。具备圆筒状的内磁轭和圆筒状的外磁轭的转子相对于所述中心轴配置成同心圆状,所述圆筒状的内磁轭和圆筒状的外磁轭将所述线圈在半径方向上夹在彼此之间,在彼此之间形成磁路。
9.专利文献6记载的无铁心电动机是作为旋转中心的中心轴贯通无铁心电动机内的构造。即,中心轴在中心轴延伸的方向上贯通圆筒状的线圈。另外,所述中心轴在中心轴延伸的方向上贯通具备内磁轭和外磁轭的转子。
10.由于是这样的构造,因此与以往的无铁心电动机同样地,也未想到在专利文献6记载的无铁心电动机中,将减速器等单元内置于无铁心电动机内部。
11.现有技术文献
12.专利文献
13.专利文献1:wo2006/114881
14.专利文献2:日本特开2008-263742号公报
15.专利文献3:日本特开2009-38844号公报
16.专利文献4:日本特开2003-143805号公报
17.专利文献5:日本特开2010-263761号公报
18.专利文献6:wo2015/162826
技术实现要素:
19.发明所要解决的课题
20.本发明的目的在于,提出一种无铁心电动机,该无铁心电动机不增大无铁心电动机的旋转轴延伸的方向的长度(大小),而使减速器、制动器等单元与该无铁心电动机内的所述旋转轴的端部结合,内置有该单元。
21.用于解决课题的手段
22.在无铁心电动机中,在圆筒状的内转子的内侧,在所述中心轴延伸的方向上设置空间部(space),在该空间部(space)配置减速器、制动器、旋转编码器、风扇、转矩传感器、电路等单元,所述圆筒状的内转子位于圆筒状线圈的内侧,所述圆筒状线圈相对于作为旋转中心的中心轴配置成同心圆状并沿所述中心轴延伸的方向延伸。
23.即,在所述无铁心电动机的内侧,以使在作为旋转中心的中心轴延伸的方向上延伸的圆筒状线圈、圆筒状的内磁轭在所述中心轴延伸的方向上不贯通的方式,使所述中心轴在中途终止。由此,在所述无铁心电动机的内侧,在所述中心轴延伸的方向上,例如在所述内磁轭的内侧,在所述中心轴延伸的方向上设置空间部(space),在该空间部(space)配置所述单元。
24.1.25.一种无铁心电动机,具备:
26.圆筒状的线圈,其相对于作为旋转中心的中心轴配置成同心圆状,其一侧的端面由定子支承,并且所述圆筒状的线圈在所述中心轴延伸的方向上延伸;
27.转子,其具备圆筒状的内磁轭和圆筒状的外磁轭,所述圆筒状的内磁轭和圆筒状的外磁轭将所述线圈在半径方向上夹在彼此之间,在彼此之间形成磁路,所述转子相对于所述中心轴配置成同心圆状,并在半径方向的中心侧支承于所述中心轴;以及
28.外壳,其为圆筒状的外壳,具备在半径方向上配置于所述外磁轭的外侧的圆筒状部,并且相对于所述中心轴能够旋转,其中,
29.在该无铁心电动机内的空间部具备与该无铁心电动机内的所述中心轴的端部结合的单元。
30.2.31.在[1]所述的无铁心电动机中,所述中心轴的与结合有所述单元的端部相向的一侧,在沿着所述中心轴延伸的方向上空开间隔的两个部位,能够旋转地支承于所述外壳的半径方向的中心侧,由此,所述外壳相对于所述中心轴能够旋转。
[0032]
[3]
[0033]
一种无铁心电动机,具备:
[0034]
圆筒状的线圈,其相对于作为旋转中心的中心轴配置成同心圆状,其一侧的端面由定子支承,并所述圆筒状的线圈在所述中心轴延伸的方向上延伸;
[0035]
转子,其具备圆筒状的内磁轭和圆筒状的外磁轭,所述圆筒状的内磁轭和圆筒状的外磁轭将所述线圈在半径方向上夹在彼此之间,在彼此之间形成磁路,所述转子相对于所述中心轴配置成同心圆状,并在半径方向的中心侧支承于所述中心轴;以及
[0036]
外壳,其为圆筒状的外壳,具备在半径方向上配置于所述外磁轭的外侧的圆筒状部,并且通过所述中心轴的旋转而使所述圆筒状部旋转,其中,
[0037]
在该无铁心电动机内的空间部具备与该无铁心电动机内的所述中心轴的端部结合的单元。
[0038]
[4]
[0039]
在[3]所述的无铁心电动机中,所述单元是将所述中心轴的旋转传递到所述外壳的机构。
[0040]
[5]
[0041]
在[3]或[4]所述的无铁心电动机中,所述中心轴的与结合有所述单元的端部相向的一侧,在沿着所述中心轴延伸的方向空开间隔的两个部位,能够旋转地支承于所述定子的半径方向的中心侧。
[0042]
[6]
[0043]
在[1]至[5]中任一项所述的无铁心电动机中,所述中心轴在所述中心轴延伸的方向上不贯通所述圆筒状线圈,而是通过在所述中心轴延伸的方向上的所述圆筒状线圈的中途终止来形成所述空间部。
[0044]
[7]
[0045]
在[1]至[5]中任一项所述的无铁心电动机中,所述中心轴在所述中心轴延伸的方向上不贯通所述内磁轭,而是通过在所述中心轴延伸的方向上的所述内磁轭的中途终止来形成所述空间部。
[0046]
[8]
[0047]
在[1]至[7]中任一项所述的无铁心电动机中,所述单元的外周直径比所述内磁轭的内周直径小。
[0048]
[9]
[0049]
在[1]至[8]中任一项所述的无铁心电动机中,所述单元在与所述单元的同所述中心轴的端部连接的一侧相向的一侧具备具有比所述内磁轭的内周直径大的外周直径的部分。
[0050]
发明效果
[0051]
根据本发明,能够提供一种无铁心电动机,该无铁心电动机不增大无铁心电动机的旋转轴延伸的方向的长度(大小),而使减速器、制动器等单元与该无铁心电动机内的所述旋转轴的端部结合,内置有该单元。
附图说明
[0052]
图1是对本发明的一实施方式的内部构造进行说明的剖视图。
[0053]
图2是对本发明的其他实施方式的内部构造进行说明的剖视图。
[0054]
图3是对本发明的又一实施方式的内部构造进行说明的剖视图。
[0055]
图4是对图3所示的实施方式的另一内部构造例进行说明的剖视图。
[0056]
图5是对本发明的又一实施方式的内部构造进行说明的剖视图。
[0057]
图6是对图5所示的实施方式的其他内部构造例进行说明的剖视图。
[0058]
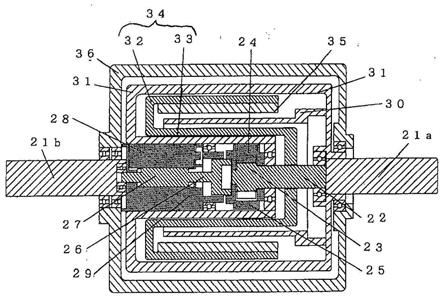
图7是对本发明的又一实施方式的内部构造进行说明的剖视图。
[0059]
图8是对图7所示的实施方式的旋转传递的机构进行说明的概念图。
[0060]
图9是对图7所示的实施方式中的旋转传递部的太阳齿轮、行星齿轮、齿轮架的配
备方式进行说明的概念图,图9(a)是从侧面观察高速侧旋转传递部并说明切断部位的图,图9(b)是高速侧旋转传递部的剖视图,图9(c)是从侧面观察低速侧旋转传递部并说明切断部位的图,图9(d)是低速侧旋转传递部的剖视图。
[0061]
图10是对在图7所示的实施方式中,配置于无铁心电动机内的单元成为一级减速机构的例子的内部构造进行说明的剖视图。
[0062]
图11是对图10所示的实施方式的旋转传递的机构进行说明的概念图。
[0063]
图12是对图7所示的实施方式的其他内部构造例进行说明的剖视图。
[0064]
图13是对图12所示的实施方式的旋转传递的机构进行说明的概念图。
[0065]
图14是说明在图10所示的实施方式中对从内置于无铁心电动机的减速机构向外壳的旋转传递使用“奇异行星”机构的情况下的内部构造的剖视图。
[0066]
图15是对图14所示的实施方式的旋转传递的机构进行说明的概念图。
具体实施方式
[0067]
(实施方式1)
[0068]
图1所示的实施方式是在无铁心电动机1的内部内置有单元13的一例。作为单元13,可以采用由齿轮等构成的现有公知的减速器。
[0069]
图1所示的无铁心电动机1具备旋转轴2、定子3、线圈4、转子7、外壳9。旋转轴2是作为旋转中心的中心轴。
[0070]
圆筒状的线圈4在旋转轴2延伸的方向上延伸,并相对于旋转轴2配置成同心圆状,圆筒状的线圈4的一侧的端面由定子3支承。在图1所示的实施方式中,左侧的端面由定子3支承。
[0071]
圆筒状的线圈4是能够通电的无铁心线圈。在图示的实施方式中,在图1中,通过在旋转轴2延伸的方向即长度方向上与多个分离的线状部隔着绝缘层重叠而形成的导电性金属片的层叠体构造,形成为圆筒状。半径方向上的厚度例如为5mm以下,具备规定的刚性。这样的圆筒状的线圈例如通过日本专利第3704044号中记载的制造方法来制造。
[0072]
转子7相对于旋转轴2配置成同心圆状,在半径方向的中心侧被固定地支承于旋转轴2。
[0073]
转子7具备圆筒状的内磁轭5和圆筒状的外磁轭6。圆筒状的内磁轭5和圆筒状的外磁轭6在半径方向上将圆筒状的线圈4夹在彼此之间,在彼此之间形成磁路。
[0074]
在图1所示的实施方式中,在外磁轭6的内周面配置有由永久磁铁等构成的磁铁8。由此,在内磁轭5与外磁轭6之间形成有截面为环状的磁场。
[0075]
代替图示的实施方式,也可以采用在内磁轭5的外周面配置磁铁8的构造。
[0076]
外壳9为圆筒状,如图1所示,具备在半径方向上配置于外磁轭6的外侧的圆筒状部。在图示的实施方式中,外壳9的圆筒状部的开口侧即一侧(图1的左侧)固定于定子3。
[0077]
外壳9在半径方向的中心将旋转轴2支承为旋转自如。在图1的实施方式中,外壳9在与固定于定子3的一侧相向的一侧、即另一侧(图1的右侧)具备圆板状部。并且,在该圆板状部的半径方向的中心具备筒状部10。筒状部10在旋转轴2延伸的方向上朝向定子3的方向延伸。旋转轴2在筒状部10的旋转轴2延伸的方向的两端侧分别经由轴承11a、11b能够旋转地支承于外壳9。
[0078]
由此,外壳9成为能够相对于旋转轴2旋转的构造。
[0079]
另外,如上所述,如图1所示,在旋转轴2延伸的方向上空开间隔的两处,旋转轴2能够旋转地支承于外壳9的半径方向的中心侧。由此,能够使后述的旋转轴2的旋转动作稳定化。
[0080]
如上所述,在内磁轭5与外磁轭6之间形成有截面为环状的磁场的状态下,通过向线圈4供给规定的电流而使转子7以及支承转子7的旋转轴2旋转。
[0081]
在本实施方式中,旋转轴2在旋转轴2延伸的方向上不贯通圆筒状的线圈4,而是在旋转轴2延伸的方向上的线圈4的中途终止。由此,在无铁心电动机1内形成有空间部14。
[0082]
并且,在无铁心电动机1内的空间部14中,单元13与旋转轴2的无铁心电动机1内的端部12结合。这样,单元13配置于无铁心电动机1内的空间部14。
[0083]
即,无铁心电动机1在无铁心电动机1内的空间部14具备与无铁心电动机1内的旋转轴2的端部12结合的单元13。
[0084]
在图1所示的实施方式中,单元13是由齿轮等构成的现有公知的减速器。
[0085]
以往,在构成将由齿轮等构成的减速器与无铁心电动机的旋转轴连接的齿轮电动机的情况下,在旋转轴的延伸方向上,在无铁心电动机1的外侧连接减速器。因此,无铁心电动机的旋转轴方向的长度增加了安装的减速器的量。
[0086]
在本实施方式中,旋转轴2在旋转轴2延伸的方向上不贯通构成无铁心电动机的圆筒状的线圈4,而是在旋转轴2延伸的方向上的线圈4的中途终止。由此,在无铁心电动机1的圆筒状的线圈4内形成有空间部14。
[0087]
在该无铁心电动机1的圆筒状的线圈4内形成的空间部14中构成为,将单元13与旋转轴2的端部12结合,将该单元13配置于无铁心电动机1的圆筒状的线圈4内的空间部14。
[0088]
因此,能够不增大无铁心电动机1的旋转轴方向的长度,而在无铁心电动机的旋转轴上连接由齿轮等构成的减速器。
[0089]
在本实施方式中,如图1所示,单元13的外周直径的大小比内磁轭5的内周直径小。
[0090]
即,在本实施方式中,在内磁轭5的内侧形成有空间部,在该空间部,单元13与无铁心电动机1内的旋转轴2的端部12结合。
[0091]
由此,不增大无铁心电动机1的旋转轴方向的长度,而在无铁心电动机的旋转轴2上连接由齿轮等构成的减速器。
[0092]
图2的实施方式表示在图1所示的实施方式中单元13具备部分13b的实施方式,部分13b具有比内磁轭5的内周直径大的外周直径。
[0093]
单元13的与旋转轴2的端部12连接的一侧的部分13a的外周直径比内磁轭5的内周直径小。另一方面,单元13的由附图标记13b表示的部分的外周直径比内磁轭5的内周直径大。
[0094]
即,单元13的至少与旋转轴2的端部12连接的一侧的部分13a的外周直径比内磁轭5的内周直径小,与单元13的同旋转轴2的端部12连接的一侧相向的一侧的部分13b的外周直径比内磁轭5的内周直径大。
[0095]
图2所示的实施方式也是在无铁心电动机1内的空间部14具备与无铁心电动机1内的旋转轴2的端部12结合的单元13的构造。
[0096]
由此,不增大无铁心电动机1的旋转轴方向的长度,在无铁心电动机的旋转轴2上
连接由齿轮等构成的减速器这一点与图1所示的实施方式相同。
[0097]
其他方面与使用图1说明的上述内容相同。因此,对与上述的构造共通的部分标注与图1所使用的附图标记相同的附图标记并省略说明。
[0098]
(实施方式2)
[0099]
图3所示的实施方式是在无铁心电动机1的内部内置有单元13的其他例子。作为单元13,能够采用制动器。
[0100]
在图3所示的实施方式中,旋转自如地支承于外壳9的旋转轴2延伸至外壳9的外部而成为输出端12b。其他构造与使用图1在实施方式1中说明的构造相同。因此,对与在实施方式1中说明的构造相同的部分标注与图1的说明中使用的附图标记相同的附图标记并省略其说明。
[0101]
在图3所示的实施方式中,旋转轴2在旋转轴2延伸的方向上不贯通圆筒状的内磁轭5,而是在旋转轴2延伸的方向上的内磁轭5的中途终止。由此,在无铁心电动机1的圆筒状的内磁轭5内形成有空间部14。
[0102]
在本实施方式中,与旋转轴2的无铁心电动机1内的端部12结合的单元13能够设为制动器。
[0103]
在本实施方式中,构成制动器的单元13的整体配置于内磁轭5的内侧。
[0104]
在向无铁心电动机1内的空间部即空间部14a突出的旋转轴2的前端侧12a,能够结合构成制动器的单元13以外的其他单元。
[0105]
图4所示的实施方式表示,在图3所示的实施方式中,在向无铁心电动机1内的空间部即空间部14a突出的旋转轴2的前端侧12a结合有单元15的实施方式的一例。
[0106]
单元15例如可以设为旋转编码器。
[0107]
在图4所示的实施方式中,在无铁心电动机1的内部内置有单元13和单元15这样的多个单元。
[0108]
另外,在图4所示的实施方式中,单元13的外周直径和单元15的外周直径都比内磁轭5的内周直径小。
[0109]
在本实施方式中,在内磁轭5的内侧形成有空间部,在该空间部,单元13、15与无铁心电动机1内的旋转轴2的端部12、12a结合。
[0110]
(实施方式3)
[0111]
图5、图6所示的实施方式是在无铁心电动机1的内部内置有单元的其他例子。作为单元,可以采用风扇。
[0112]
在图5、图6所示的实施方式中,也与图3、图4所示的实施方式相同,旋转轴2在旋转轴2延伸的方向上不贯通圆筒状的内磁轭5,而是在旋转轴2延伸的方向上的内磁轭5的中途终止。由此,在无铁心电动机1的圆筒状的内磁轭5内形成有空间部。
[0113]
在图5所示的实施方式中,在无铁心电动机1中,在圆筒状的内转子5的内侧,在旋转轴2延伸的方向上设置空间部(space)14,在空间部(space)14配置风扇18,圆筒状的内转子5位于相对于旋转轴2配置成同心圆状的圆筒状的线圈4的内侧。
[0114]
图6所示的实施方式将风扇18在旋转轴2延伸的方向上配置在内磁轭5的端缘的外侧。与图5所示的实施方式相同,风扇18的外周直径的大小内磁轭5的内径的大小小。
[0115]
其他构造与使用图1在实施方式1中说明的构造相同。因此,对与在实施方式1中说
明的构造相同的部分标注与图1的说明中使用的附图标记相同的附图标记并省略其说明。
[0116]
在内磁轭5与外磁轭6之间形成有环状的磁场的状态下,通过向线圈4供给规定的电流而使转子7以及支承转子7的旋转轴2旋转。
[0117]
在图5所示的实施方式中,风扇18配置于在内转子5的内侧沿旋转轴2延伸的方向形成的空间部(space)14,因此,与旋转轴2、转子7(内磁轭5、外磁轭6)的旋转对应地,如图7所示,通过风扇18产生朝向无铁心电动机1的内部的空气流。
[0118]
另外,虽然在图5、图6中省略了图示,但能够经由向风扇18供给电力的电力线向风扇18供给电力而使风扇18运转。
[0119]
由此,无铁心电动机1的内部被空冷。
[0120]
(实施方式4)
[0121]
使用图7、图8说明本发明的其他实施方式。
[0122]
在图7、图8所示的实施方式中,无铁心电动机的旋转轴22在固定轴21a、21b之间在固定轴21a、21b延伸的方向上延伸。圆筒状的外壳36被支承为能够相对于固定轴21a、21b旋转。并且,圆筒状的外壳36随着旋转轴22的旋转而在固定轴21a、21b的周向上旋转。
[0123]
在本实施方式中,旋转轴22也是作为旋转中心的中心轴。
[0124]
内置于无铁心电动机1的内部的单元形成将旋转轴22的旋转传递到外壳36的机构。由此,圆筒状的外壳36随着无铁心电动机的旋转轴22的旋转而在固定轴21a、21b的周向上旋转。
[0125]
作为内置于无铁心电动机1的内部且将旋转轴22的旋转传递至外壳36的单元,例如采用减速机构。
[0126]
图7所示的无铁心电动机也具备旋转轴22、定子31、线圈30、转子34、外壳36。
[0127]
圆筒状的线圈30在旋转轴22延伸的方向上延伸,并相对于旋转轴22配置成同心圆状,圆筒状的线圈30的一侧的端面由定子31支承。在图7所示的实施方式中,右侧的端面由定子31支承。
[0128]
定子31为圆筒状,在图7中,在右侧,其半径方向的内侧固定于固定轴21a。
[0129]
圆筒状的定子31具备:在构成转子34的外磁轭32的半径方向上位于外侧的外侧圆筒状部;在外侧圆筒状部的图7的左侧端弯曲并向半径方向内侧延伸的圆板状部;以及在圆板状部的内径端弯曲并朝向图7的右侧延伸的内侧圆筒状部。
[0130]
圆筒状的线圈30是实施方式1中说明的能够通电的无铁心线圈。
[0131]
转子34相对于旋转轴22配置成同心圆状,在半径方向的中心侧被固定地支承于旋转轴22。在图示的实施方式中,在转子34的右侧,其半径方向的内侧固定于旋转轴22。
[0132]
与实施方式1同样地,转子34具备圆筒状的内磁轭33和圆筒状的外磁轭32。圆筒状的内磁轭33和圆筒状的外磁轭32将圆筒状的线圈30在半径方向上夹在彼此之间,在彼此之间形成磁路。
[0133]
在图7所示的实施方式中,在外磁轭32的内周面配置有由永久磁铁等构成的磁铁35。由此,在内磁轭33与外磁轭32之间形成有截面为环状的磁场。
[0134]
与实施方式1同样地,也可以代替图示的实施方式,采用在内磁轭33的外周面配置磁铁35的构造。
[0135]
外壳36为圆筒状,如图7所示,具备在半径方向上配置于外磁轭32的外侧的圆筒状
部。在图7所示的实施方式中,配置于外壳36的外磁轭的外侧的圆筒状部成为从半径方向的外侧覆盖定子31的外侧圆筒状部的构造。
[0136]
在外壳36的圆筒状部的两端分别具备朝向半径方向内侧延伸的右侧圆板状部、左侧圆板状部,该左右的圆板状部的内径侧被支承为能够相对于固定轴21a、21b旋转。
[0137]
在图示的实施方式中,在外壳36的右侧,右侧圆板状部的半径方向的内侧经由轴承能够旋转地装配于定子31的右端侧外周,定子31固定于固定轴21a。另外,在外壳36的左侧,左侧圆板状部的半径方向的内侧经由轴承能够旋转地装配于固定轴21b。
[0138]
固定于固定轴21a的定子31的右端的半径方向内侧部具备朝向无铁心电动机的内侧(图7中的左侧)延伸的筒状部。该筒状部经由轴承将旋转轴22的固定轴21a侧的端部支承为能够旋转。
[0139]
在旋转轴22延伸的方向上,与比转子34的半径方向内侧固定于旋转轴22的位置靠图7中的左侧,通过定子31的内侧筒状部的内径侧并经由轴承而将旋转轴22支承为能够旋转。
[0140]
在将转子34的半径方向内侧固定于旋转轴22的位置夹在中间,在旋转轴22延伸的方向上空开规定间隔的两处,如上所述,旋转轴22能够旋转地支承于定子31的半径方向的中心侧。由此,能够实现后述的旋转轴22的旋转的稳定化。
[0141]
与实施方式1~3同样地,在内磁轭33与外磁轭32之间形成有截面为环状的磁场的状态下,通过向线圈30供给规定的电流来使支承转子34以及转子34的旋转轴22旋转。
[0142]
在本实施方式中,旋转轴22在旋转轴22延伸的方向上也不贯通圆筒状的线圈30以及内磁轭33,而是在旋转轴22延伸的方向上的线圈30、内磁轭33的中途终止。
[0143]
由此,在圆筒状的线圈30、内磁轭33的内侧形成空间部,与旋转轴22结合的单元配置于该空间部。
[0144]
在图7、图8所示的实施方式中,在圆筒状的线圈30、内磁轭33的内侧配置有空间部,与旋转轴22结合的单元成为将旋转轴22的旋转传递到外壳36的机构。
[0145]
在图7、图8所示的实施方式中,该单元是将旋转轴22的旋转传递到外壳36的二级减速机构。
[0146]
通过经由减速机构将旋转轴22的旋转传递到外壳36,外壳36在沿旋转轴22延伸的方向延伸的固定轴21a、21b的周向上旋转。
[0147]
图9表示图7、图8所示的实施方式中的旋转传递部的太阳齿轮、行星齿轮、齿轮架的配置方式的一例。
[0148]
另外,在图7~图9中,省略形成于定子31的内侧筒状部的内周面的内齿轮等的图示,概略地图示了太阳齿轮、行星齿轮、齿轮架等的配置、结合方式。
[0149]
在图7、图8所示的实施方式中,旋转轴22的图7中的左端侧外周成为高速侧太阳齿轮23。高速侧太阳齿轮23的旋转经由高速侧行星齿轮24、高速侧齿轮架25传递至低速侧输入轴26。低速侧输入轴26的图7中的左端侧外周成为低速侧太阳齿轮27。低速侧太阳齿轮27的旋转经由低速侧行星齿轮28、低速侧齿轮架29,进而经由配置于低速侧齿轮架29与外壳36的左侧圆板状部的半径方向内侧端之间的齿轮架传递至外壳36。
[0150]
即,如图8所示,(1)从转子34向旋转轴22、(2)从形成于旋转轴22的左端侧的高速侧太阳齿轮向高速侧行星齿轮、(3)从高速侧行星齿轮向高速侧齿轮架、(4)从高速侧齿轮
架向低速侧输入轴、(5)从形成于低速侧输入轴的左端侧的低速侧太阳齿轮向低速侧行星齿轮、(6)从低速侧行星齿轮向低速侧齿轮架、(7)从低速侧齿轮架经由配置在低速侧齿轮架和外壳之间的齿轮架向外壳传递旋转。
[0151]
在图7~图9所示的实施方式中,转子34及旋转轴22的旋转以两级减速并传递至外壳36的旋转。
[0152]
图10、图11所示的实施方式表示,在一级的减速中,将转子34及旋转轴22的旋转传递至外壳36的旋转的情况的一例。
[0153]
旋转轴22的图10中的左端侧外周成为太阳齿轮27a。太阳齿轮27a的旋转经由行星齿轮28a、齿轮架29a,进而经由配置在齿轮架29a与外壳36的左侧圆板状部的半径方向内侧端之间的齿轮架传递到外壳36。
[0154]
即,如图11所示,从(1)从转子34向旋转轴22、(2)从旋转轴22的左端侧形成的太阳齿轮向行星齿轮、(3)从行星齿轮向齿轮架、(4)从齿轮架经由配置在该齿轮架与外壳之间的齿轮架向外壳传递旋转。
[0155]
图12、图13所示的实施方式是,在图7、图8所示的实施方式中,受到低速侧行星齿轮28的公转运动的低速侧齿轮架29直接与外壳36的左侧圆板状部的半径方向内侧端连结(结合)的构造。
[0156]
如图13所示,(1)从转子34向旋转轴22传递旋转运动、(2)从形成于低速侧输入轴的左端侧的低速侧太阳齿轮向低速侧行星齿轮、(3)从低速侧行星齿轮向连结(结合)于低速侧齿轮架的外壳传递旋转。
[0157]
图14、图15是,在图10、图11所示的实施方式中,对经由在无铁心电动机内结合于旋转轴22的减速器而将旋转轴22的旋转传递到外壳36的机构,采用被称为所谓的“奇异行星”的机构的图。
[0158]
在外壳36的左侧圆板状部的半径方向内侧端形成有朝向图14中的右侧方向延伸的筒状部。在该筒状部的内周壁能够旋转地安装有内齿轮。另外,在定子31的内侧圆筒状部的内周固定地配备有内齿轮。行星齿轮28a与固定地配备在定子31的内侧圆筒状部的内周的内齿轮及能够旋转地配备在外壳36的所述筒状部的内周壁的内齿轮啮合。
[0159]
如图15所示,(1)从转子34向旋转轴22、(2)从在旋转轴22的左端侧形成的太阳齿轮向行星齿轮、(3)行星齿轮向外壳36的筒状部传递旋转。
[0160]
根据该构造,即使旋转轴22是与图10、图11所示的实施方式的情况相同的旋转速度,外壳36的旋转也比图10、图11图示的实施方式的情况缓、慢。
[0161]
以上,参照附图对本发明的实施方式进行了说明,但本发明并不限定于所述的实施方式,能够在由权利要求书的记载所掌握的技术范围内进行各种变更。
[0162]
例如,在所述实施方式中,在无铁心电动机1内的空间部,具体而言在内磁轭5的半径方向内侧形成的空间部中,与无铁心电动机1内的旋转轴2、22的端部结合的单元是由制动器、旋转编码器、齿轮等构成的减速器。
[0163]
在无铁心电动机内的空间部中与无铁心电动机内的旋转轴的端部结合的单元不限于此,也可以是转矩传感器或电路。若外周直径比内磁轭的内周直径小,则能够将各种单元在无铁心电动机内的空间部与无铁心电动机内的旋转轴的端部结合。
[0164]
并且,通过在无铁心电动机内的空间部中使单元与无铁心电动机内的旋转轴的端
部结合,从而能够提供一种无铁心电动机,该无铁心电动机不增大无铁心电动机的旋转轴延伸的方向的长度(大小),而在无铁心电动机内的旋转轴的端部结合各种单元并内置有该单元。
[0165]
附图标记说明
[0166]
1无铁心电动机;
[0167]
2旋转轴;
[0168]
3定子;
[0169]
4圆筒状的线圈;
[0170]
5内磁轭;
[0171]
6外磁轭;
[0172]
7转子;
[0173]
8磁铁;
[0174]
9外壳;
[0175]
10筒状部;
[0176]
11a、11b轴承;
[0177]
12无铁心电动机内的旋转轴的端部;
[0178]
12a无铁心电动机内的旋转轴的前端侧;
[0179]
13内置于无铁心电动机的单元;
[0180]
14、14a无铁心电动机内的空间部;
[0181]
15内置于无铁心电动机的其他单元;
[0182]
21a、21b固定轴;
[0183]
22旋转轴;
[0184]
23高速侧太阳齿轮;
[0185]
24高速侧行星齿轮;
[0186]
25高速侧齿轮架;
[0187]
26低速侧输入轴;
[0188]
27低速侧太阳齿轮;
[0189]
27a太阳齿轮;
[0190]
28低速侧行星齿轮;
[0191]
28a行星齿轮;
[0192]
29低速侧齿轮架;
[0193]
29a齿轮架;
[0194]
30线圈;
[0195]
31定子;
[0196]
32外磁轭;
[0197]
33内磁轭;
[0198]
34转子;
[0199]
35磁铁;
[0200]
36外壳。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1