一种异步电机的初始速度辨识及带速重投控制方法及装置
1.本发明属于电机控制领域,更具体地,涉及一种异步电机的初始速度辨识及带速重投控制方法及装置。
背景技术:
2.随着国家现代化程度的不断深化,轨道交通、电动矿山车等主要以异步电机控制为主的领域的发展也受到了多方面的关注。这其中,由速度传感器故障引发的牵引系统故障时有发生,解决此问题最好的办法之一就是将无速度传感器控制作为备选甚至是主流牵引方案。在各个控制系统中,有时会出现瞬时故障保护、短暂无电等导致的封锁逆变器的情况,所以会不可避免地面临“带速度重新投入运行”这一特殊工况。而无速度传感器控制系统在封锁逆变器时无法维持速度估计,所以有必要在投入运行前通过算法辨识出电机的初始速度。
3.为了解决上述问题,中国专利cn113437919a公开了一种三相逆变器带异步电机端子无残压的带速重投系统及方法。具体做法是三相逆变器在逆变桥输出端增加了lc滤波电路,通过电流闭环,给电流注入一定频率和幅值的电流,通过检测lc滤波电感l上的电流和电容c上的电压来获取电机初始转速。另外,中国专利cn109639203b公开了一种基于注入直流电流的异步电机带速重投方法。通过求解直流注入时的状态方程,得到所述牵引异步电机的转子磁链;提取所述转子磁链中的正交转子磁链信号;基于所述正交转子磁链信号计算所述牵引异步电机的初始转速。中国专利cn113437919a的方法实现简单、结果可靠,但需要额外增加硬件;专中国专利cn109639203b的方法辨识过程迅速准确,但由于转子磁链观测器和带通滤波器的引入,使得算法相对复杂,同时辨识结果的精度还依赖转子磁链观测器的精度。
4.基于上述缺陷和不足,本领域亟需在电机带速度重新投入时先把电机转速辨识出来,从而使得观测器立即收敛,避免观测器出现冲击甚至发散的现象。
技术实现要素:
5.针对现有技术的以上缺陷或改进需求,本发明提供了一种异步电机的初始速度辨识及带速重投控制方法及装置,其中结合异步电机自身的特征及其带速重投控制工艺特点,相应设计了异步电机的带速重投控制方法及装置,将固定频率旋转的定子电压下定子电流随转速的变化曲线图以及固定频率旋转的定子电压下的定子电流扩展heyland圆作为判据,将电机最大转子频率作为首次速度搜索的初始值,采用速度手段控制算法进行向上或者向下迭代,可以在很小的电流、转矩冲击下成功实现带速度重投控制。因而尤其适用于无速度传感器控制电力牵引工程。
6.为实现上述目的,按照本发明的一个方面,提出了一种异步电机的初始速度辨识及带速重投控制方法,包括以下步骤:
7.s1将电机最大转子频率的一半作为首次速度搜索的初始值,并以该转子频率的值
施加电压矢量;
8.s2构建速度搜索施加的定子电压频率计算模型;
9.s3绘制固定频率旋转的定子电压下定子电流随转速的变化曲线图以及固定频率旋转的定子电压下的定子电流扩展heyland圆,并以此作为判据,构建判据函数;
10.s4根据所述判据函数判断所述定子电压频率计算模型向上或者向下迭代;
11.s5根据步骤s4中迭代计算得到的新的转子频率,将该新的转子频率的值作为步骤s2中第n次搜索所要施加的定子电压频率进行搜索计算,重复步骤s2至步骤s5,直至搜索计算满足设定的结束条件,搜索计算过程结束,输出电机转子频率,并将该转子频率的值赋给速度观测器。
12.作为进一步优选的,步骤s2中,所述定子电压频率计算模型如下:
13.(ω0=0,n≥0,且n为正整数)
14.式中,n为速度搜索过程进行到的次数,所述ωn为第n次搜索时施加的定子电压的频率,ω
n-1
为第n-1次搜索时施加的定子电压的频率,ω
r_max
为电机最大转子频率。
15.作为进一步优选的,步骤s3中,所述判据函数的计算模型如下:
[0016][0017][0018]
式中,s(n)为判据函数,为定子电流在同步旋转坐标系下的q轴分量。
[0019]
作为进一步优选的,步骤s3具体包括以下步骤:
[0020]
s31建立电机在以任意频率ω旋转的参考坐标系下的8个基本方程:
[0021][0022][0023][0024][0025][0026][0027][0028][0029]
式中,rs为定子电阻,rr为转子电阻,ls为定子电感,lm为互感,lr为转子电感,rs、rr、ls、lm、lr这五个变量为电机参数;ω为该参考坐标系的旋转频率,ωr为电机转子频率,ω、ωr这两个变量为可变量;为定子电压在该参考坐标系下的d轴分量,为定子电压在该参考坐标系下的q轴分量,这两个变量为输入变量;为定子电流在该参考
坐标系下的d轴分量,为定子电流在该参考坐标系下的q轴分量,为定子磁链在该参考坐标系下的d轴分量,为定子磁链在该参考坐标系下的q轴分量,为转子电流在该参考坐标系下的d轴分量,为转子电流在该参考坐标系下的q轴分量,为转子磁链在该参考坐标系下的d轴分量,为转子磁链在该参考坐标系下的q轴分量,这8个变量为8个状态观测变量;p为微分算子;
[0030]
s32忽略动态过程,并选取定子频率旋转坐标系作为参考坐标系,联立步骤s31中的基本方程,消掉8个状态观测变量中的6个,只保留和固定ω,将ωr范围限定为0-2ω,输入量为和观测因变量为和可解得方程为:
[0031][0032][0033]
式中,f1(),f2()为联立解得的关系式,表示和分别随自变量ωr的变化而变化的关系,为定子电压在同步旋转坐标系下的d轴分量,为定子电压在同步旋转坐标系下的q轴分量,ωr为转子频率;
[0034]
s33根据步骤s32中的求解结果,绘制出在以定子频率ω为参考的坐标系下与随ωr的曲线,从而获取固定频率旋转的定子电压下定子电流随转速的变化曲线图;
[0035]
s34根据步骤s33中获取的固定频率旋转的定子电压下定子电流随转速的变化曲线图,获取绘制出横纵坐标均为电流的矢量图,从而获得固定频率旋转的定子电压下的定子电流扩展heyland圆;
[0036]
s35以所述固定频率旋转的定子电压下定子电流随转速的变化曲线图和固定频率旋转的定子电压下的定子电流扩展heyland圆作为判据,构建判据函数。
[0037]
作为进一步优选的,步骤s5中,所述结束条件根据定子电流在同步旋转坐标系下的q轴分量的大小、速度搜索结果误差以及速度搜索时间确定。
[0038]
按照本发明的另一个方面,还提供了一种异步电机的初始速度辨识及带速重投控制系统,用于实现是上述的方法,包括:
[0039]
电流传感器模块,用于采集电机的电流信息;
[0040]
信息转换模块,用于将电流信息进行转化,并根据转化后的信息绘制固定频率旋转的定子电压下定子电流随转速的变化曲线图以及固定频率旋转的定子电压下的定子电流扩展heyland圆,并以此作为判据,构建判据函数;
[0041]
速度搜索控制算法模块,用于根据转化后的信息绘制固定频率旋转的定子电压下定子电流随转速的变化曲线图以及固定频率旋转的定子电压下的定子电流扩展heyland圆,并以此作为判据,构建判据函数,同时还用于集成定子电压频率计算模型,并将电机最大转子频率的一半作为首次速度搜索的初始值,以该转子频率的值施加电压矢量,同时根据所述判据函数判断所述定子电压频率计算模型向上或者向下迭代,以进行定子电压频率
计算模型的迭代计算,直至搜索计算满足设定的结束条件,搜索计算过程结束,输出电机转子频率;
[0042]
速度观测器,用于接收所述速度搜索控制算法模块输出的电机转子频率。
[0043]
作为进一步优选的,所述定子电压频率计算模型如下:
[0044]
(ω0=0,n≥0,且n为正整数)
[0045]
式中,n为速度搜索过程进行到的次数,所述ωn为第n次搜索时施加的定子电压的频率,ω
n-1
为第n-1次搜索时施加的定子电压的频率,ω
r_max
为电机最大转子频率。
[0046]
所述判据函数的计算模型如下:
[0047][0048][0049]
式中,s(n)为判据函数,为定子电流在同步旋转坐标系下的q轴分量。
[0050]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
[0051]
1.本发明将固定频率旋转的定子电压下定子电流随转速的变化曲线图以及固定频率旋转的定子电压下的定子电流扩展heyland圆作为判据,将电机最大转子频率的一半作为首次速度搜索的初始值,采用速度搜索控制算法进行向上或者向下迭代,可以在很小的电流、转矩冲击下成功实现带速度重投控制。
[0052]
2.本发明中使用的判据不依赖硬件,不依赖其他观测器,只与电机自身的特性有关,所以实现简单、可靠性高;只要给定定子电压幅值合理,在全速度范围内所使用的判据不需要做任何调整,具有全速度范围一致的优点;重投过程可以在0.5s内实现,重投时间较短;若以7步搜索为例,搜索结果的误差小于0.75%,搜索结果准确。
[0053]
3.本方法在重投过程中,由于重投时间短,转矩冲击小,所以在轨道交通等大惯量的牵引系统中带来的负面影响很微弱。同时由于本方法具有重投时间短,可靠性高,全速度范围一致,搜索结果准确等优点,十分适合在轨道交通等大惯量的牵引系统中应用。
附图说明
[0054]
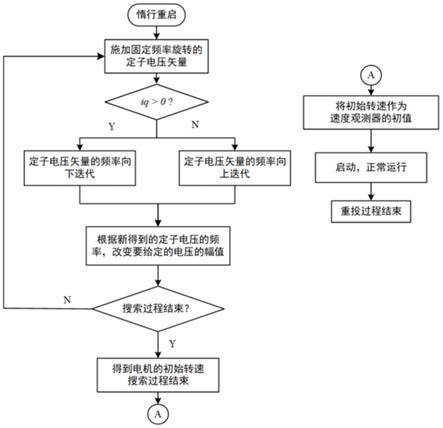
图1是本发明优选实施例涉及的一种异步电机的初始速度辨识及带速重投控制方法的流程图;
[0055]
图2是本发明优选实施例涉及的一种异步电机的初始速度辨识及带速重投控制示意图;
[0056]
图3是本发明一种异步电机的初始速度辨识及带速重投控制方法涉及的固定频率旋转的定子电压下定子电流随转速的变化曲线图。
[0057]
图4是本发明一一种异步电机的初始速度辨识及带速重投控制方法涉及的固定频率旋转的定子电压下的定子电流扩展heyland圆示意图。
具体实施方式
[0058]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对
本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0059]
在封锁逆变器阶段,龙伯格观测器速度估计随之停止工作。尽管控制系统可能配有车速监控等间接反映电机转速的测速装置可以与牵引系统通讯,但是其准确性和时效性都不能够保证,尤其在逆变器封锁期间电机可能会速度突变,所以控制系统有必要在带速度重新投入时有必要先把电机转速辨识出来,从而使得观测器立即收敛,避免观测器出现冲击甚至发散的现象。为此,本发明提供
[0060]
如图1和图2所示,本发明实施例提供的一种异步电机的初始速度辨识及带速重投控制方法,包括以下步骤:
[0061]
步骤一,将电机最大转子频率的一半作为首次速度搜索的初始值,并以该转子频率的值施加电压矢量。最为本发明的优选实施例,将电机最大转子频率的一半作为首次速度搜索的初始值,并以该转子频率的值施加电压矢量。
[0062]
步骤二,构建速度搜索施加的定子电压频率计算模型。
[0063]
其中,所述定子电压频率计算模型如下:
[0064]
(ω0=0,n≥0,且n为正整数)
[0065]
式中,n为速度搜索过程进行到的次数,所述ωn为第n次搜索时施加的定子电压的频率,ω
n-1
为第n-1次搜索时施加的定子电压的频率,ω
r_max
为电机最大转子频率。
[0066]
步骤三,绘制固定频率旋转的定子电压下定子电流随转速的变化曲线图以及固定频率旋转的定子电压下的定子电流扩展heyland圆,并以此作为判据,构建判据函数。
[0067]
所述判据函数的计算模型如下:
[0068][0069][0070]
式中,s(n)为判据函数,为定子电流在同步旋转坐标系下的q轴分量。
[0071]
更具体的,本步骤具体包括以下步骤:
[0072]
构建感应电机在以任意的速度旋转的坐标系下的8个基本方程,包含电流、磁链等共8个状态变量。即建立电机在以任意频率ω旋转的参考坐标系下的8个基本方程:
[0073][0074][0075][0076][0077][0078]
[0079][0080][0081]
式中,rs为定子电阻,rr为转子电阻,ls为定子电感,lm为互感,lr为转子电感,rs、rr、ls、lm、lr这五个变量为电机参数;ω为该参考坐标系的旋转频率,ωr为电机转子频率,ω、ωr这两个变量为可变量;为定子电压在该参考坐标系下的d轴分量,为定子电压在该参考坐标系下的q轴分量,这两个变量为输入变量;为定子电流在该参考坐标系下的d轴分量,为定子电流在该参考坐标系下的q轴分量,为定子磁链在该参考坐标系下的d轴分量,为定子磁链在该参考坐标系下的q轴分量,为转子电流在该参考坐标系下的d轴分量,为转子电流在该参考坐标系下的q轴分量,为转子磁链在该参考坐标系下的d轴分量,为转子磁链在该参考坐标系下的q轴分量,这8个变量为8个状态观测变量;p为微分算子。
[0082]
忽略动态过程,并选取定子频率旋转坐标系作为参考坐标系,联立上述步骤中的基本方程,消掉8个状态观测变量中的6个,只保留和固定ω,将ωr范围限定为0-2ω,输入量为和观测因变量为和可解得方程为:
[0083][0084][0085]
式中,f1(),f2()为联立解得的关系式,表示和分别随自变量ωr的变化而变化的关系,为定子电压在同步旋转坐标系下的d轴分量,为定子电压在同步旋转坐标系下的q轴分量,ωr为转子频率。
[0086]
根据上述的求解结果,绘制出在以定子频率ω为参考的坐标系下与随ωr的曲线,从而获取固定频率旋转的定子电压下定子电流随转速的变化曲线图,如图3所示。
[0087]
根据固定定子电压下定子电流随转速的变化曲线图,如图3所示,获取绘制出横纵坐标均为电流的矢量图,绘制出横纵坐标均为电流的矢量图,从而获得固定频率旋转的定子电压下的定子电流扩展heyland圆,如图4所示,该圆的定义为:固定频率定子电压矢量作用下的定子电流随转速变化的空间矢量图。
[0088]
以所述固定频率旋转的定子电压下定子电流随转速的变化曲线图和固定频率旋转的定子电压下的定子电流扩展heyland圆作为判据,构建判据函数s(n)。
[0089]
其中,ω为施加定子电压矢量的电频率,ωr为真实的转子频率。可以看出,若选定的定子电压幅值合理,真实转子频率ωr与施加的定子频率ω的大小关系可以由的正负判断,由此可以作为速度搜索迭代的判据。
[0090]
步骤四,根据所述判据函数判断所述定子电压频率计算模型向上或者向下迭代。
[0091]
步骤五,根据步骤四中迭代计算得到的新的转子频率,将该新的转子频率的值作为步骤二中第n次搜索所要施加的定子电压频率进行搜索计算,重复步骤二至步骤五,直至搜索计算满足设定的结束条件,搜索计算过程结束,输出电机转子频率,并将该转子频率的值赋给速度观测器。
[0092]
更具体的,如图2所示,由速度搜索控制算法给出当前控制所用的定子电压与ω,再从采样的电流中提取相关判据信息给到速度搜索控制算法,控制算法会更新下一次迭代后的控制所用的与ω,直至搜索过程结束。
[0093]
按照本发明的另一个方面,还提供了一种异步电机的初始速度辨识及带速重投控制装置,用于实现上述方法,包括:电流传感器模块,用于采集电机的电流信息;信息转换模块,用于将电流信息进行转化,并根据转化后的信息绘制固定频率旋转的定子电压下定子电流随转速的变化曲线图以及固定频率旋转的定子电压下的定子电流扩展heyland圆,并以此作为判据,构建判据函数;速度搜索控制算法模块,用于根据转化后的信息绘制固定频率旋转的定子电压下定子电流随转速的变化曲线图以及固定频率旋转的定子电压下的定子电流扩展heyland圆,并以此作为判据,构建判据函数,同时还用于集成定子电压频率计算模型,并将电机最大转子频率的一半作为首次速度搜索的初始值,以该转子频率的值施加电压矢量,同时根据所述判据函数判断所述定子电压频率计算模型向上或者向下迭代,以进行定子电压频率计算模型的迭代计算,直至搜索计算满足设定的结束条件,搜索计算过程结束,输出电机转子频率;速度观测器,用于接收所述速度搜索控制算法模块输出的电机转子频率。
[0094]
其中,所述定子电压频率计算模型如下:
[0095]
(ω0=0,n≥0,且n为正整数)
[0096]
式中,n为速度搜索过程进行到的次数,所述ωn为第n次搜索时施加的定子电压的频率,ω
n-1
为第n-1次搜索时施加的定子电压的频率,ω
r_max
为电机最大转子频率。
[0097]
所述判据函数的计算模型如下:
[0098][0099][0100]
式中,s(n)为判据函数,为定子电流在同步旋转坐标系下的q轴分量。
[0101]
在本发明的一个优选实施例中,该方法如下:
[0102]
(1)将最大转子频率ω
r_max
的一半作为首次速度搜索的初始值,并以该频率施加电压矢量;
[0103]
(2)通过对判据的判断,决定频率向上或向下迭代,进而更新下一次施加电压的频率与幅值,进行下一步搜索,定子频率逐渐接近真实转子频率。第n次的速度搜索施加的定子电压频率为:第n次的速度搜索施加的定子电压幅值为查表曲线拟合所得;
[0104]
(3)结合的大小、速度搜索结果误差与速度搜索时间,可以确定搜索次数与搜索
结束条件。
[0105]
(4)搜索结束后,把速度搜索的结果赋给速度观测器,即可正常运行。
[0106]
即本发明提供的带速重投方法适用于所有的异步电机无速度传感器控制系统,与速度观测器种类无关,速度搜索时间很短,在0.5s以内。
[0107]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1