电动机控制的制作方法
1.本发明涉及一种用于控制电动机的方法。
背景技术:
2.许多电动机由变速驱动器驱动。可以利用变速驱动器驱动的电动机的参数来设置变速驱动器,以改善对该电动机的控制。
3.然而,利用电机参数设置变速驱动器需要电动机的知识,这并不总是可用的,并且在可用时不一定准确。
4.因此,需要确定电动机的准确设置参数并将其提供给变速驱动器以更好地控制电动机。
技术实现要素:
5.因此,本公开的目的是提出一种用于使用变速驱动器控制电动机的方法,该方法允许实时计算变速驱动器的设置参数。
6.本公开的另一个目的是允许电动机用户基于计算的设置来控制电动机以改善变速驱动器的控制。
7.为了达到这些目的,本公开提出基于电动机的表示模型和控制电动机的变速驱动器的测量值来确定vsd参数组。vsd参数是指控制电动机的变速驱动器的输入参数。vsd参数可以对应于电动机的参数。电动机的表示模型是指一个或多个等式,其表示一个或多个电机参数的初始估计值与在电动机操作点的一个或多个电机参数的实际值之间的差;以及一个或多个等式,其允许基于一个或多个参数的初始估计值确定电动机在操作点的理论响应。因此,本公开提出基于变速驱动器的测量值来确定表示模型的电机参数的细化估计值,以便确定一组准确的vsd参数以改善对电动机的控制。
8.本公开描述一种使用变速驱动器控制电动机的方法,该方法包括:
[0009]-通过变速驱动器向电动机施加一个或多个电气命令,使得电动机在一个或多个确定的操作点运行;
[0010]-针对每个确定的操作点,通过变速驱动器基于变速驱动器在所述操作点处的测量值来确定电动机中的实际操作参数;
[0011]-针对每个确定的操作点,通过变速驱动器基于电动机的表示模型的电机参数的初始估计值和与所述操作点相关联的电气命令来确定电动机中的估计操作参数;
[0012]-针对每个确定的操作点,基于实际操作参数和估计操作参数来计算操作差;
[0013]-针对每个确定的操作点,通过变速驱动器基于操作差和电动机的表示模型来确定至少一个操作系数的值;
[0014]-通过变速驱动器基于在每个操作点确定的至少一个操作系数和表示模型来确定表示模型的至少一个电机参数的细化估计值;
[0015]-通过变速驱动器基于至少一个电机参数的细化估计值确定vsd参数组的值,所述
vsd参数组包括至少两个vsd参数。
[0016]
这种控制方法允许基于电动机参数的细化估计值实时确定vsd参数组。使用该vsd参数组作为用于控制电动机的变速驱动器的输入改进了电动机的控制。此外,该控制方法确定适用于每个电动机的vsd参数组,因此允许通过变速驱动器改进对多个电动机的控制。
[0017]
可选地,所述表示模型包括电动机的电气参数或机械参数。这种表示模型允许通过变速驱动器基于电动机的电气或机械方面控制电动机。
[0018]
可选地,基于电动机的默认参数组来建立该表示模型。基于默认参数组初始化电机参数的估计值允许以较少的操作点提高vsd参数的确定精度。
[0019]
在一些示例中,该默认参数组包括电动机的铭牌值。铭牌的这种参数允许在方法开始时基于电动机制造商提供的信息确定表示模型的电机参数的初始估计值。
[0020]
可选地,该方法还包括基于所确定至少一个电机参数的细化估计值的更新表示模型。更新表示模型允许在电动机的寿命期间细化电动机的表示模型。
[0021]
可选地,该方法还包括:
[0022]-当至少一个操作系数先前存储的至少一个操作系数之间的距离高于确定的阈值时,将所述至少一个操作系数的值存储到变速驱动器中。
[0023]
这样的距离允许更准确地确定电机参数的细化估计值,进而更准确地确定vsd参数组的值。
[0024]
可选地,所述估计操作参数和所述实际操作参数分别为包括若干值的估计向量和实际向量,并且所述操作差对应于所述估计向量和所述实际向量的范数的差。这允许基于可用于确定电动机的表示模型的若干值(即若干数据)来确定电动机的理论响应和实际响应。
[0025]
可选地,所述方法还包括基于电气命令的值和在操作点确定的操作差来确定表示模型的性能值。性能值允许基于表示模型的电机参数的当前值来确定由变速驱动器控制电动机的性能。
[0026]
可选地,所述方法包括当性能值低于确定的阈值时继续执行该方法。这允许细化vsd参数组,如果后者是基于比期望精度低的表示模型确定的。
[0027]
可选地,所述方法还包括通过变速驱动器基于存储的vsd参数组来控制电动机。这允许基于存储在变速驱动器中的vsd参数组来控制电动机,该vsd参数组可以在每次迭代时通过该方法进行细化。
[0028]
可选地,vsd参数组包括定子电阻、空载电流、漏电感、转子时间常数、负载扭矩和电机惯性中的至少两个。这些参数可以表征许多电动机并且因此可以用于电动机的许多表示模型中。
[0029]
可选地,将类型分配给所述电动机,并且,所述方法还包括在远程服务器中存储电动机数据集,所述电动机数据集包括所确定的vsd参数组、电动机的类型和电动机的运行时间。这允许计算由执行在此提出的方法的变速驱动器控制的每个多个电动机的统计数据。
[0030]
本公开还提出了一种用于电动机数据的处理方法,包括基于运行时间期间电动机的vsd参数组的演变对电动机进行分类。例如,这允许识别比其他生产线更好的一些与电动机的vsd参数演变相关的生产线,从而识别生产线上的一些潜在问题。
[0031]
用于电动机数据的处理方法还包括基于包含特定类型的电动机的若干数据集,针
对特定类型的电动机确定在确定的运行时间的预测的vsd参数组。
[0032]
这允许例如为由变速驱动器驱动的电动机设置准确的vsd参数组,该变速驱动器可能无法使用在此提出的方法。此外,确定预测组允许基于电动机的特定类型和运行时间直接为控制电动机的变速驱动器设置准确的vsd参数。
[0033]
本公开还描述一种包括指令的计算机可读存储介质,所述指令在由处理器执行时使所述处理执行如上述所述的方法中的任一的方法。
[0034]
本公开还描述一种变速驱动器,包括适于根据上述所述的方法中的任一的方法控制电动机的处理器。
附图说明
[0035]
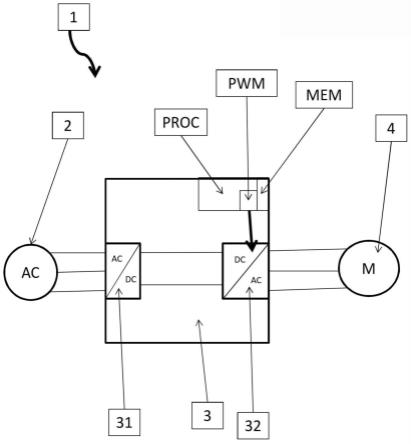
图1示出了由变速驱动器控制的电机的示例。
[0036]
图2示出了第一示例方法。
[0037]
图3a示出了vsd参数组的第一例。
[0038]
图3b示出了表示模型的电机参数组的第一示例。
[0039]
图3c示出了表示模型的等式的第一示例。
[0040]
图3d示出了基于电机参数组确定的vsd参数组的第一示例。
[0041]
图4示出了第二示例方法。
[0042]
图5a示出了vsd参数组的第二示例。
[0043]
图5b示出了表示模型的电机参数组的第二示例。
[0044]
图5c示出了表示模型的等式的第二示例。
[0045]
图5d示出了基于电机参数组确定的vsd参数组的第二示例。
[0046]
图6示出了第三示例方法。
[0047]
图7a示出了vsd参数组的第三示例。
[0048]
图7b示出了表示模型的电机参数组的第三示例。
[0049]
图7c示出了表示模型的电机参数组的第四示例。
[0050]
图7d示出了表示模型的等式的第三示例。
[0051]
图7e示出了基于电机参数组确定的vsd参数组的第三示例。
[0052]
图8示出了第四示例方法。
[0053]
图9a示出了表示模型的电机参数组的第五示例。
[0054]
图9b举例示出了一些操作系数与电机参数组的初始值和细化估计值之间的联系。
[0055]
图9c示出了基于电机参数组确定的vsd参数组的第四示例。
具体实施方式
[0056]
本公开适用于使用变速驱动器的电动机的控制方法。
[0057]
在本公开中,变速驱动器应该被理解为用于电动机的电子的、虚拟的或软件实现的控制单元。变速驱动器可以使用电气命令控制电动机并且特别地可以向电机施加确定的电压。在一些示例中,变速驱动器包括处理和控制单元,该处理和控制单元旨在通过考虑例如输入速度设定点、在电动机的正常操作期间施加到电动机的电压、和待应用于逆变器级以获得这些输出电压的控制指令来实施控制律。控制律可以是向量或标量类型。变速驱动
器可以包括在输入处的整流器级,这种整流器级旨在将由电网提供的交流电压转换成直流电压。在一些示例中,整流器级可以是半波整流器。变速驱动器还可以包括一方面连接到整流器级并且另一方面连接到逆变器级的直接电源总线。直流电源总线可以包括两条电源线,该两条电源线通过配置为稳定总线电压的至少一个总线电容器或齐纳二极管而连接在一起。整流器可以是诸如二极管桥的无源类型或基于受控晶体管的有源类型。逆变器级可以连接在直流电源总线的输出端,并且用于切断由总线以可变电压提供给电动机的电压。逆变器级可以包括例如多个开关臂,每个开关臂包括受控功率晶体管,例如igbt类型,用于将可变电压施加到电动机。例如,可以通过使用pwm(脉冲宽度调制)或矢量控制类型的传统技术来控制逆变器。由处理单元执行的控制律使得可以确定要施加到旨在连接到要控制的电机的输出相的电压。
[0058]
在本公开中,电动机应理解为可由变速驱动器驱动的任何种类的电动机。电动机可以是由交流电压控制的电机,例如感应电机。在一些示例中,电动机可以是同步电动机或异步电动机。
[0059]
图1示出了一个包含由变速驱动器控制的电动机的系统示例。系统1包括向变速驱动器3提供三相交流电压的电网2。变速驱动器3包括连接到电网2并将三相交流电压转换为直流电压的整流器级31。变速驱动器还包括逆变器级32,以将直流电压转换成运行电动机4的受控交流电压。变速驱动器包括处理器proc,例如控制器或微控制器。处理器proc可以包括控制从直流电压到受控交流电压的转换的pwm(脉冲宽度调制)功能。处理器proc被配置为根据在此描述的任何方法进行操作。处理器proc可以包括用于由操作系统管理的计算的电子电路。
[0060]
变速驱动器3可以包括非暂时性机器可读或计算机可读存储介质,例如存储器或存储单元mem,由此非暂时性机器可读存储介质编码有可由诸如处理器proc的处理器执行的指令,机器可读存储介质包括用于操作处理器proc以按照本文描述的示例方法中的任一个执行的指令。根据本公开的计算机可读存储器可以是存储可执行指令的任何电子、磁、光或其他物理存储设备。计算机可读存储器可以是例如随机存取存储器(ram)、电可擦除可编程只读存储器(eeprom)、存储驱动器和光盘等。如在此描述的,计算机可读存储可以根据在此描述的方法用可执行指令编码。存储或存储器可以包括存储如在此描述的可执行指令的任何电子、磁、光或其他物理存储设备。
[0061]
变速驱动器可以包括存储的vsd参数组。该存储的vsd参数组可用于通过变速驱动器控制电动机。
[0062]
在下面介绍的控制方法中,变速驱动器向电动机施加一个或多个电气命令。
[0063]
电气命令:
[0064]
施加到电动机的电气命令可以包括确定频率的电压。电压可以包括在5v和1kv之间并且优选地在300v和600v之间。确定的频率可以包括在10hz和100khz之间并且优选地在1khz和20khz之间。施加到电动机的电气命令可以驱动电动机在操作点运行。
[0065]
操作点:
[0066]
电动机的操作点可以包括电动机的速度、加速度和扭矩。电动机的速度可以以每分钟转数(rpm)表示并且可以包括在0和10000rpm之间并且优选地在1000和3000rpm之间。电动机的扭矩可以以牛顿-米(nm)表示并且可以包括在0和10knm之间并且优选地在0和
1000nm之间。在一些示例中,电动机的扭矩对应于电动机的电磁扭矩τ
em
。当变速驱动器向电动机施加电气命令时,达到操作点。
[0067]
在下面介绍的控制方法中,控制方法的一个动机是确定包括至少两个vsd参数的vsd参数组。
[0068]
vsd参数:
[0069]
在本公开中,vsd参数应理解为用于控制电动机的变速驱动器的输入参数。
[0070]
该组vsd参数是基于表示模型的一个或多个电机参数的细化估计值来确定的。
[0071]
在本公开中,电机参数的细化估计值应当理解为在本文提出的方法的迭代期间确定的表示模型中的电机参数的值。
[0072]
表示模型:
[0073]
电动机的表示模型是指一个或多个等式,其表示一个或多个电机参数的初始估计值与在电动机操作点的一个或多个电机参数的实际值之间的差;以及一个或多个等式,其允许基于一个或多个参数的初始估计值确定电动机在操作点的理论响应。
[0074]
在本公开中,电机参数的初始估计值应当理解为在本文提出的方法的迭代开始时估计的表示模型中的电机参数的值。
[0075]
在本公开中,电机参数“mp”的初始估计值将标注为电机参数“mp”的细化估算值将标注为并将电机参数“mp”的实际值标注为mp。
[0076]
电动机的表示模型的示例可以包括多个等式,每个等式包括表示模型的电机参数组中的至少一个电机参数。
[0077]
在一些示例中,电动机的表示模型可以包括主等式和子等式。
[0078]
在本公开中,主等式应当理解为包括表示模型的电机参数组的所有电机参数的等式。
[0079]
在本公开中,子等式应当理解为包括表示模型的至少一个电机参数的等式。表示模型的子等式可以是包括表示模型的一个或多个电机参数的等式。
[0080]
在一些示例中,为了基于表示模型的另一主等式获得表示模型的主等式或子等式,可以应用主等式的线性近似。在一些示例中,可以使用泰勒多项式来近似主等式。在一些示例中,子等式可以通过主等式在包括较少电机参数的子空间中的投影来确定。子等式减少了电机参数的数量,以便通过以较少的操作点运行电机来确定它们的细化估计值。
[0081]
将提供示例方法以更好地理解要求保护的发明。
[0082]
示例方法100:
[0083]
参考图2呈现了示例方法100。在示例方法100中,由变速驱动器控制的电动机是异步电动机并且可以在开环中由变速驱动器控制。通过开环,在示例方法100中应当理解,变速驱动器不测量电动机在操作点处的转子速度ωr。因此,变速驱动器不能基于转子速度ωr确定异步电动机的滑差速度ωg的实际值。滑差速度ωg对应于异步电动机的同步速度ωs和转子速度ωr之间的差。
[0084]
示例方法100的目标之一是基于示例方法100的表示模型的三个电机参数的细化估计值和一个电机参数的初始估计值来确定包括四个vsd参数的vsd参数组。四个vsd参数包括空载电流iv、定子电阻rs、漏电感lf和转子时间常数tr。图3a中示出了示例方法100的
vsd参数组svp2的示例。
[0085]
允许确定该vsd参数组svp2的示例方法100的表示模型的第一等式是:
[0086][0087]
其中:
[0088]
是定子电阻的初始估计值(定子电阻是电机参数),
[0089]
是漏电感的初始估计值(漏感是电机参数),
[0090]
是比电感的初始估计值(比电感是电机参数),
[0091]
是比电阻的初始估计值(漏电感是电机参数),
[0092]
ωs是电动机的同步速度,
[0093]
是滑差速度的估计值。
[0094]
δi
dq
是电流差,对应于在操作点处电动机在操作点的估计电流与由电动机的测量值确定的实际电流i
dq
之间的差
[0095]
v是表示在操作点处电机参数的估计值与电机参数的实际值(rs,lf,l,r
req
)的差的操作系数。
[0096]
不同的电感可以用亨利(h)来表示。不同的电阻可以用欧姆(ω)表示。
[0097]
比电感l可以基于互感lm和转子电感lr来估计。比电感l可以等于:
[0098][0099]
漏电感lf可以基于互感lm、定子电感ls和转子电感lr来估计。漏电感lf可以等于:
[0100][0101]
电阻率r
req
可以基于转子电阻rr、转子电感lr和互感lm来估计。比电阻r
req
可以等于:
[0102][0103]
估计电流和实际电流i
dq
是包括两个分量的向量。第一分量id是park坐标系的直轴(d轴)中的电流分量。第二分量iq是park坐标系的二次轴(q轴)中的电流分量。
[0104]
如第一等式(其是主等式)所表示的,示例方法100中的电动机的表示模型包括四个电机参数。四个电机参数形成电机参数组smp2,如图3b所示。第一等式在包括d和q坐标的park坐标系中表示。
[0105]
如该等式所示,操作系数v的值取决于作为估计电流δi
dq
和实际电流i
dq
之间的差的电流差电流差表征了在操作点处表示模型的电机参数的组smp2的初始估计值
与电动机的电机参数的实际值(rs,lf,l,r
req
)之间的差。
[0106]
电流差δi
dq
允许计算电机参数的细化估计值
[0107]
电机参数的一些细化估计值可用于确定vsd参数组svp2,如图3d的箭头所示,其示出了在本示例中,电机参数组smp2的电机参数的哪个细化估计值和哪个初始估计值用于确定vsd参数组svp2。
[0108]
因此,示例方法100的目标之一是确定表示模型的电机参数的细化估计值以确定vsd参数组svp2。
[0109]
可以使用二阶线性近似从第一等式计算表示模型的第二等式:
[0110][0111]
其中:
[0112]
δrs是定子电阻的初始估计值与定子电阻的实际值rs之间的差;
[0113]
δlf是漏电感的初始估计值与漏电感的实际值lf之间的差;
[0114]
是比电感的初始估计值的倒数与比电感的实际值的倒数之间的差;
[0115]
是在确定的操作点处滑差速度的估计值除以比电阻的初始估计值与其实际值之间的差;
[0116]
v1是根据在确定的操作点处定子电阻的初始估计值和实际电流i
dq
估计的操作系数,
[0117]
v2是基于在确定的操作点处漏电感的初始估计值同步速度ωs和实际电流i
dq
估计的操作系数,
[0118]
v3是基于在确定的操作点处比电阻比电感的初始估计值、滑差速度的估计值同步速度ωs和确定的操作点处的实际电流i
dq
估计的操作系数,
[0119]
v4是在确定的操作点处基于比电阻比电感的初始估计值、滑差速度的估计值同步速度ωs和实际电流i
dq
估计的操作系数。
[0120]
示例方法100的表示模型的第二等式(由于第二等式包括电机参数组smp2的所有电机参数,因此也是主等式)包括电机参数的实际值(rs,lf,l,r
req
)。然而,表示模型的第二等式不允许将电阻率的实际值r
req
与电动机的滑差速度的实际值ωg分开。如上所述,在开环中,变速驱动器无法访问滑差速度的实际值ωg,因此,示例方法100不允许在不知道滑差
速度的实际值ωg的情况下确定电机参数的细化估计值将比电阻的初始估计值与转子时间常数tr连接起来的箭头在图3d中示出,因为示例方法100不允许确定比电阻的细化估计值因此,变速驱动器将基于比电感的细化估计值和比电阻的估计值来确定转子时间常数tr。在示例方法100的表示模型的第二等式的形式中,变速驱动器也不能获得其他电机参数的细化估计值
[0121]
示例方法100的表示模型因此包括使用第二等式在子空间中的投影从第二等式计算的第三等式(其为子等式):
[0122][0123]
其中:
[0124]
q是基于在确定的操作点处定子电阻漏电感比电阻比电感的初始估计值、滑差速度的估计值、同步速度ωs和电流差而估计的操作系数,
[0125]qrs
是在确定的操作点处基于定子电阻比电阻比电感的初始估计值以及滑差速度的估计值而估计的操作系数,
[0126]qlf
是在确定的操作点处基于泄漏电感比电阻比电感的初始估计值以及滑差速度的估计值而估计的操作系数,
[0127]ql
是在确定的操作点处根据比电感的初始估计值和同步速度ωs而估计的操作系数,
[0128]
示例方法100的表示模型的第三等式不包括连接到滑差速度的实际值ωg的任何项,因此,除了电机参数rs,lf和l的实际值之外,第三等式的所有项都是已知的。因此,第三等式具有三个要确定的值,它们是电机参数的实际值rs,lf和l。实际上,要确定的三个值对应于三个电机参数的细化估计值
[0129]
在该示例中,变速驱动器允许基于电机参数相应的操作系数q
rs
,q
lf
和q
l
以及操作系数q来确定电机参数的细化估计值如上所述,操作系数q,q
rs
,q
lf
和q
l
连接到电动机的操作点。因此,在三个不同的操作点处,变速驱动器确定具有三个待确定值的三个等式的系统,变速驱动器可以求解这些值以确定电机参数的细化估计值然后将使用电机参数的细化估计值来确定vsd参数组。示例方法100的表示模型的示例在图3c中示出并且包括第二和第三等式。
[0130]
下面呈现寻找vsd参数组svp2的值的示例方法100。
[0131]
如块110中所示,示例方法100包括通过变速驱动器施加三个电气命令以达到电动机的三个确定的操作点。
[0132]
如块120中所示,示例方法100包括由变速驱动器针对每个确定的操作点基于变速驱动器在操作点处的测量值来确定实际电流i
dq
。实际电流i
dq
对应于电动机在每个操作点的电流。更准确地说,实际电流i
dq
是基于三个测量电流i1,i2和i3确定的,这三个测量电流对应于电动机在操作点处的每个绕组中的电流。在一些示例中,实际电流i
dq
的范数等于:
[0133][0134]
其中:
[0135]
|i
dq
|是电动机中实际电流i
dq
的范数,
[0136]
id是park坐标系的直轴(d轴)上电流的第一分量,并且可以基于电动机的绕组中的测量电流i1,i2和i3确定,
[0137]iq
是park坐标系的二次轴(q轴)上的电流的第二分量,并且可以基于电动机的绕组中的测量电流i1,i2和i3确定。
[0138]
在本公开中,不同的电流可以用安培(a)来表示。
[0139]
实际电流i
dq
取决于表示模型的电机参数的实际值(rs,lf,l,r
req
),因为它是根据变速驱动器在操作点的测量值确定的。实际电流i
dq
还取决于施加到电动机以达到操作点的电气命令。
[0140]
在示例方法100中,实际电流i
dq
对应于与操作点相关联的实际操作参数opr。实际操作参数opr可以表征电动机在操作点处的实际响应,其基于操作点处的变速驱动器的测量值而确定。
[0141]
如块130中所示,示例方法100包括由变速驱动器对于每个确定的操作点确定电动机中的估计电流
[0142]
估计电流是基于电动机表示模型的定子电阻漏电感比电阻和比电感的初始估计值以及施加到电动机以达到操作点的电气命令来估计的。换句话说,在每个操作点的估计电流是基于电机参数的初始估计值和电气命令来估计的。
[0143]
估计电流对应于与示例方法100的操作点相关联的估计操作参数ope。估计的操作参数ope可以表征基于电机参数的初始估计值确定的电动机在操作点处的理论响应。
[0144]
如块140中所示,示例方法100包括由变速驱动器对于每个确定的操作点计算电流差δi
dq
。电流差δi
dq
对应于电动机在操作点的估计电流与电动机在操作点的实际电流i
dq
之间的差因此,电流差δi
dq
代表在操作点处表示模型的电机参数组smp2的初始估计值与电机参数的实际值(rs,lf,l,r
req
)之间的差。
[0145]
电流差δi
dq
对应于与示例方法100的操作点相关联的操作差opd。操作差opd表示电机在操作点的理论响应和实际响应之间的差。
[0146]
如块150中所示,示例方法100包括由变速驱动器对于每个确定的操作点基于电流差δi
dq
和示例方法100的第三等式确定操作系数q,q
rs
,q
lf
,q
l
的值。因此,在每个操作点,基于电机的表示模型和操作差opd来估计操作系数的值。
[0147]
在示例方法100的该点上,变速驱动器已经对于每个操作点确定了操作系数组。在一些示例中,第一操作点的操作系数组可以是(q1,q1
rs
,q1
lf and q1
l
),第二操作点的操作系数组可以是(q2,q2
rs
,q2
lf and q2
l
),并且三操作点的操作系数组可以是(q3,q3
rs
,q3
lf and q3
l
)。因此,变速驱动器获得三个等式的系统:
[0148]
1)
[0149]
2)
[0150]
3)
[0151]
将块150连接到块110的方法100的箭头示出了这样的事实,即在该示例中,变速驱动器从块110到块150运行三次以确定与三个确定的操作点中的每一个相关联的操作系数。
[0152]
如块160中所示,示例方法100包括由变速驱动器确定定子电阻漏电感和比电感的细化估计值。基于在每个操作点确定的操作系数组和第三等式来确定电机参数的细化估计值(和)。通过解决上述系统,变速驱动器可以确定定子电阻漏电感和比电感的细化估计值,从而使vsd“知道”这些值。在某些示例中,可以使用矩阵来确定电机参数的实际值:
[0153][0154]
其中w对应于
[0155]
x对应于并且
[0156]
y对应于
[0157]
因此,变速驱动器可以将定子电阻漏电感和比电感的细化估计值确定为等于定子电阻rs、漏电感lf和比电感l的实际值,其例如可以通过矩阵求逆并通过计算w、x和y来确定。实际上,由于测量的不完善性、确定表示模型等式的不同近似值以及不同系数的计算,我们无法知道我们正在确定的值是否是电机参数的实际值。这就是为什么本公开使用“细化估计值”的术语,该术语表示比电机参数的初始估计值更接近电机参数的实际值的值。
[0158]
示例方法100的电动机的表示模型需要三个操作点来确定定子电阻漏电感和比电感的细化估计值。然而,可能有三个以上的操作点,例如n个操作点(n》3),并获
得有用于确定三个值的n个等式的系统,其中n大于三,n是自然整数。换言之,为了确定定子电阻漏电感和比电感的细化估计值,示例方法100需要至少三个操作点。当等式超过三个时(n》3),有三个待确定值的n个等式的系统将没有任何解。因此,变速驱动器可以通过递归最小二乘算法确定定子电阻漏电感和比电感的细化估计值。更一般地,变速驱动器可以基于线性回归模型来确定细化估计值。
[0159]
如块170中所示,示例方法100包括由变速驱动器基于定子电阻漏电感和比电感的细化估计值和比电阻初始估计值确定vsd参数组svp2的四个值。该块如图3d所示。电机参数的漏电感的细化估计值允许直接确定该组vsd参数组的漏电感lf。电机参数的定子电阻的细化估计值允许直接确定vsd参数组的定子电阻rs。电机参数的比电感的细化估计值允许间接确定vsd参数组svp2的空载电流iv。比电感的细化估计值还允许间接确定转子时间常数tr,该转子时间常数tr还基于比电阻的初始估计值而估计。
[0160]
这里,直接确定的意思是vsd参数的值直接等于电机参数的细化估计值。这里,间接确定的意思是可以基于电机参数的细化估计值来确定vsd参数的值。
[0161]
示例方法100允许通过在开环中确定vsd参数组的值来改善使用变速驱动器的电动机的控制。该vsd参数组的值是基于比初始估计值更接近电机参数的实际值的电动机的电参数的细化估计值确定的。
[0162]
示例方法200:
[0163]
参考图4呈现了示例方法200。在示例方法200中,由变速驱动器控制的电动机是异步电动机并且可以在闭环中由变速驱动器控制。在示例方法200中,闭环应理解为变速驱动器在操作点测量异步电动机的转子速度ωr。因此,变速驱动器可以基于转子速度ωr确定异步电动机的滑差速度ωg的实际值。即,变速驱动器测量在操作点处的电动机的转子速度ωr。
[0164]
示例方法200的目标之一是基于示例方法200的表示模型的四个电机参数的细化估计值来确定包括四个vsd参数的vsd参数组。四个vsd参数包括空载电流iv、转子时间常数tr、定子电阻rs和漏电感lf。图5a中示出了示例方法200的vsd参数组svp3的示例。vsd参数组svp3包括与vsd参数组svp2相同的参数。
[0165]
允许确定该vsd参数组svp3的示例方法200的表示模型的第一等式是:
[0166][0167]
其中示例方法200的表示模型的第一等式类似于示例方法100的表示模型的第一等式,不同之处在于估计滑差速度的值不再是估计值而是滑差速度的实际值ωg,由于闭环中的电动机控制,变速驱动器可以计算该滑差速度的实际值ωg。因此,示例方法200的表
示模型包括如图5b所示的四个电机参数的电机参数组smp3。
[0168]
示例方法200的表示模型的第二等式可以基于二阶线性近似从第一等式计算:
[0169][0170]
其中示例方法200的表示模型的第二等式类似于示例方法100的表示模型的第二等式,除了最后一项,因为变速驱动器可以计算每个操作点的滑差速度的实际值ωg。
[0171]
示例方法200的第二等式的操作系数v1和v2是基于与示例方法100的第二等式相同的值来估计的。关于示例方法200的第二等式的操作系数v,v3和v4,它们也基于与示例方法100的第二等式相同的值进行估计,除了滑差速度的估计值被滑差速度的实际值代替ωg。
[0172]
在示例200中,可以访问滑差速度的实际值ωg的变速驱动器因此可以确定电机参数的实际值r
req
。
[0173]
示例方法200的表示模型包括基于示例方法200的第二等式在子空间中的投影从第二等式计算的第三等式(其是子等式):
[0174][0175]
其中示例方法200的表示模型的第三等式类似于示例方法100的表示模型的第三等式。相同的引用适用于相同的对象。
[0176]
示例方法200的第三等式的操作系数q
l
是基于与示例方法100的第三等式相同的值获得的。关于示例方法200的第三等式的操作系数q,q
rs
,q
lf
,它们也基于与示例方法100的第三等式相同的值进行估计,除了滑差速度的估计值被滑差速度的实际值ωg代替。
[0177]
在一些示例中,操作系数q可以等于:
[0178][0179]
其中:
[0180][0181][0182]
[0183][0184]
并且
[0185]
在一些示例中,操作系数q
rs
可以等于:
[0186][0187]
在一些示例中,操作系数q
lf
可以等于:
[0188][0189]
在一些示例中,操作系数q
l
可以等于:
[0190][0191]
通过计算操作点处滑差速度的实数值ωg,示例方法200的表示模型还包括基于第二等式在子空间中的投影从第二等式计算的第四等式(其也是子等式):
[0192][0193]
其中:
[0194]
r是基于在确定的操作点处定子电阻漏电感比电阻比电感的初始估计值、同步速度ωs、滑差速度的实际值ωg和电流差估计的操作系数,
[0195]rrs
是基于在确定的操作点处定子电阻比电阻比电感的初始估计值和滑差速度的实际值ωg而估计的操作系数,
[0196]rlf
是基于在确定的操作点处泄漏电感比电阻比电感的初始估计值、滑差速度的实际值ωg和同步速度ωs而估计的操作系数,
[0197]rrreq
是基于在确定的操作点处比电阻比电感的初始估计值、滑差速度的实际值ωg和同步速度估计ωs的操作系数。
[0198]
在一些示例中,操作系数r可以等于:
[0199]
[0200]
其中t1,ed,t2,eq对应于上述操作系数q的相同表达。
[0201]
在一些示例中,操作系数r
rs
可以等于:
[0202][0203]
在一些示例中,操作系数r
lf
可以等于:
[0204][0205]
在一些示例中,操作系数r
rreq
可以等于:
[0206][0207]
示例方法200的表示模型的示例在图5c中示出并且包括第二、第三和第四等式。
[0208]
变速驱动器知道第三等式的所有项,除了定子电阻rs、漏电感lf和比电感l的实际值,并且知道第四等式的所有项,除了定子电阻rs、漏电感电感lf和电阻率r
req
的实际值。由于定子电阻rs、漏电感lf的两个实际值都包含在示例方法200的表示模型的第三和第四等式中,所以这两个等式包括要确定的四个细化估计值
[0209]
因此,在此示例中,变速驱动器使用两个操作点来确定具有四个待确定值的四个等式的系统,变速驱动器求解该系统以确定定子电阻漏电感比电感和比电阻的细化估计值。
[0210]
下面呈现了寻找vsd参数组svp3的值的示例方法200。
[0211]
如块210中所示,示例方法200包括通过变速驱动器施加两个电气命令以达到两个确定的操作点。
[0212]
如块220中所示,示例方法200包括由变速驱动器针对每个确定的操作点基于变速驱动器在操作点处的测量值来确定实际电流i
dq
和滑差速度的实际值ωg。
[0213]
滑差速度ωg基于在确定的操作点处的电动机的转子速度ωr的测量来确定。
[0214]
实际电流i
dq
对应于电动机在每个操作点处的电流,并由变速驱动器根据三个测量电流i1,i2和i3确定,这些电流i1,i2和i3对应于电机的每个绕组中的电流,如上示例方法100所呈现的。
[0215]
在一些示例中,实际电流i
dq
的范数等于:
[0216][0217]
其中:
[0218]
|i
dq
|是电动机中实际电流i
dq
的范数,
[0219]
id是park坐标系的直轴(d轴)上的电流分量,并且可以基于电动机的绕组中的测量电流i1,i2和i3来确定,
[0220]iq
是park坐标系的二次轴(q轴)上的电流分量,并且可以根据电动机的绕组中的
测量电流i1,i2和i3来确定。
[0221]
实际电流i
dq
取决于表示模型的电机参数的实际值,因为它是根据变速驱动器在操作点的测量值确定的。实际电流i
dq
还取决于施加到电动机以达到操作点的电气命令。实际电流i
dq
对应于与示例方法200的操作点相关联的实际操作参数opr。
[0222]
如块230中所示,示例方法200包括由变速驱动器对于每个确定的操作点确定电动机中的估计电流
[0223]
估计电流是基于电动机表示模型的定子电阻漏电感比电阻比电感的初始估计值以及施加到电动机以达到操作点的电气命令来估计的。估计电流对应于与示例方法200的操作点相关联的估计操作参数ope。
[0224]
如块240中所示,示例方法200包括由变速驱动器对于每个确定的操作点计算电流差δi
dq
。电流差δi
dq
对应于电动机在操作点处的估计电流与电动机在操作点处测量的实际电流i
dq
之间的差电流差δi
dq
对应于与示例方法200的操作点相关联的操作差opd。
[0225]
如块250中所示,示例方法200包括由变速驱动器针对每个确定的操作点基于电流差δi
dq
以及第三和第四等式确定操作系数q,q
rs
,q
lf
,q
l
,r,r
rs
,r
lf
,r
rreq
的值。因此,在每个操作点,基于电机的表示模型和操作差opd来估计操作系数的值。
[0226]
此时,变速驱动器已经对于每个操作点确定了操作系数组。在一些示例中,第一操作点的操作系数组可以是(q1,q1
rs
,q1
lf
,q1
l
,r1,r1
rs
,r1
lf
和r1
rreq
),并且第二操作点的操作系数组可以是(q2,q2
rs
,q2
lf
,q2
l
,r2,r2
rs
,r2
lf
和r2
rreq
)。因此,变速驱动器获得四个等式的系统:
[0227]
1)
[0228]
2)
[0229]
3)
[0230]
4)
[0231]
将块250连接到块210的方法200的箭头说明了这样的事实,即变速驱动器运行块210-250两次,对于两个操作点中的每一个运行一次以获得四个等式。
[0232]
如块260中所示,示例方法200包括由变速驱动器确定定子电阻漏电感比电感和比电阻的细化估计值。电机参数的细化估计值是基于在每个操作点处确定的操作系数组以及第三和第四等式来确定的。通过基于操作系数和
表示模型求解上述系统,变速驱动器能够确定定子电阻漏电感比电感和比电阻的细化估计值。在一些示例中,可以使用矩阵来确定电机参数的细化估计值:
[0233][0234]
其中w对应于
[0235]
x对应于
[0236]
y对应于并且,
[0237]
z对应于
[0238]
因此,变速驱动器可以将定子电阻漏电感比电感和比电阻的细化估计值确定为等于定子电阻rs、漏电感lf、比电感l和比电阻r
req
的实际值,其例如基于矩阵求逆并通过计算w、x,和y来确定。
[0239]
示例方法200的电动机的表示模型需要两个操作点来确定定子电阻漏电感比电感和比电阻的细化估计值,但可能有两个以上的操作点,例如n个操作点(n》2)并获得对于待确定的四个值具有2n个等式的系统。换言之,为了确定定子电阻漏电感比电感和比电阻的细化估计值,示例方法200需要至少两个操作点。如上面针对示例方法100所呈现的,在对于四个细化估计值的2n个等式的情况下,变速驱动器可以基于递归最小二乘算法或基于线性回归模型来确定细化估计值。
[0240]
如块270中所示,示例方法200包括由变速驱动器基于定子电阻漏电感比电感和比电阻的细化估计值确定vsd参数组svp3的四个值。该块如图5d所示。电机参数的漏电感的细化估计值允许直接确定该组vsd参数组的漏电感lf。电机参数的定子电阻的细化估计值允许直接确定vsd参数组的定子电阻rs。电机参数的比电感的细化估计值允许间接确定vsd参数组svp3的空载电流iv。比电感和比电阻的细化估计值允许间接确定转子时间常数tr。示例方法200允许通过在闭环中确定vsd参数组的值来改进使用变速驱动器的电动机的控制。该vsd参数组的值是基于电动机的电气参数的细化估计
值确定的。
[0241]
我们刚刚展示了两个示例,其允许使用电动机的电气参数来确定vsd参数组,但我们可以使用机械参数进行类似的确定。这是下面示例方法300的目标。
[0242]
示例方法300:
[0243]
参考图6呈现了示例方法300。
[0244]
示例方法300的目标之一是基于示例方法300的表示模型的至少两个电机参数的细化估计值来确定包括两个vsd参数的vsd参数组svp4。这两个vsd参数包括电动机的电机惯性j和负载扭矩τ
l
。示例方法300的vsd参数组svp4的示例在图7a中示出。
[0245]
允许确定该vsd参数组svp4的示例方法300的表示模型的第一等式是:
[0246][0247]
其中:
[0248]
是电动机的电机惯性的初始估计值并且可以以千克米平方(kg.m2)表示(电机惯性是电机参数),
[0249]
是操作系数并且对应于电动机的加速度。加速度可以用米每秒的平方(m.s-2
)表示。
[0250]
τ
em
是操作系数并且对应于电动机的电磁扭矩。电磁扭矩可以用牛顿米(nm)表示,
[0251]
是电动机的负载扭矩τ
l
的初始估计值。负载扭矩可以用牛顿米(nm)表示。
[0252]
在一些示例中,电机惯性可以包括转子惯性。在一些示例中,电机惯性是电机中不同惯性的总和。
[0253]
电动机的负载扭矩τ
l
可以等于:
[0254]
τ
l
=k0,或
[0255]
τ
l
=k0+k1ωr,或
[0256]
τ
l
=k0+k1ωr+
…
+kmω
rm
,
[0257]
其中:
[0258]
k0,k1,
…
,km为负载扭矩参数,并且对应电动机的电机参数,m为自然整数,并且
[0259]
ωr对应于电动机在操作点处的转子速度。
[0260]
图7b中呈现了说明该实施例的示例方法300的电机参数组smp4的示例。
[0261]
为了示例方法300的目的,可以选择等于负载扭矩参数k0的负载扭矩τ
l
。图7c中呈现了说明该实施例的示例方法300的电机参数组smp5的示例。
[0262]
因此,允许确定vsd参数组svp4的示例方法300的表示模型的第二等式是:
[0263][0264]
在示例方法300中,其目的在于确定电机惯性的细化估计值和电机参数的细化估计值
[0265]
如块310所示,方法300包括通过变速驱动器向电动机施加电气命令,使得电动机相继在两个不同的操作点运行。
[0266]
如块320中所示,示例方法300包括由变速驱动器针对每个确定的操作点基于变速驱动器在操作点处的测量值来确定电动机的实际加速度和实际电磁扭矩τ
em
。实际加速度和实际电磁扭矩τ
em
两者都允许确定示例方法300的实际操作参数opr。在这种情况下,实际操作参数opr包括实际向量,该实际向量包括实际加速度和实际电磁扭矩τ
em
。在一些示例中,实际操作参数opr的值可以是实际向量的范数。
[0267]
如块330中所示,示例方法300包括由变速驱动器针对每个确定的操作点,基于电机惯性和负载扭矩参数的初始估计值、示例方法300的第二等式以及施加到电动机以达到确定的操作点的电气命令来确定电动机的估计加速度和估计电磁扭矩估计加速度和估计电磁扭矩都允许确定示例方法300的估计操作参数ope。在这种情况下,估计操作参数ope包括估计矢量,该估计矢量包括估计加速度和估计电磁扭矩。在一些示例中,估计操作参数ope的值可以是估计向量的范数或量值。
[0268]
如块340中所示,示例方法300包括由变速驱动器针对每个确定的操作点基于实际操作参数opr和估计操作参数ope计算操作差opd。这里,操作差可以对应于在操作点处电动机中的估计操作参数ope的值与基于操作点处的变速驱动器的测量值获得的实际操作参数opr的值之间的距离。在一些示例中,操作差opd可以对应于估计向量的范数或量值与实向量的范数之间的差。示例方法300的操作差opd与操作点相关联。
[0269]
如块350中所示,示例方法300包括由变速驱动器针对每个确定的操作点基于操作差opd和电动机的表示模型来确定操作系数ocj和oc
k0
的值。图7d中示出了示例方法300的电动机的表示模型p的示例,其包括操作系数ocj和oc
k0
。
[0270]
此时,变速驱动器已经对于每个操作点确定了操作系数组。在一些示例中,第一操作点的操作系数组可以是(oc1j,oc1
k0
)并且第二操作点的操作系数组可以是(oc2j,oc2
k0
)。因此,变速驱动器已经确定了具有变速驱动器可以确定的待确定的两个值(电机惯性和负载扭矩参数的细化估计值)的两个等式的系统。
[0271]
将块350连接到块310的方法300的箭头说明了这样的事实,即变速驱动器运行块310-350两次,对于两个操作点中的每一个运行一次以获得两个等式。对于之前的示例方法,示例方法300可以包括多于两个的操作点,例如n个操作点,其中n是大于二的自然整数(n》2),以获得具有带确定的两个细化估计值的n个等式。在这种情况下,示例方法300可以使用线性回归模型作为递归最小二乘算法来确定细化估计值。
[0272]
如块360中所示,示例方法300包括由变速驱动器确定电机惯性和负载扭矩参数的细化估计值。电机参数的细化估计值(和)是基于在每个操作点确定的操作系数组和电机的表示模型来确定的。
[0273]
如块370中所示,示例方法300包括由变速驱动器基于电机惯性和负载扭矩参数
的细化估计值确定vsd参数组svp4的两个值。该块如图7e所示。电机参数的电机惯性的细化估计值允许直接确定该vsd参数组的电机惯性j。负载扭矩参数的细化估计值允许间接确定vsd参数组svp4的电动机的负载扭矩τ
l
。
[0274]
需要说明的是,负载扭矩τ
l
可以包括若干负载扭矩参数k0,k1,k2,
…
,km(对应于m+1个电机参数,m为自然整数),这意味着示例方法300可以包括至少m+2个操作点,以根据第二等式确定vsd参数svp4组的电机惯性j和负载扭矩τ
l
。
[0275]
示例方法300允许通过确定vsd参数组的值来改进使用变速驱动器的电动机的控制。该vsd参数组的值基于电动机的机械参数的细化估计值来确定。
[0276]
上面介绍的三个示例方法包括相同类型的块,块之间的变化取决于所选的电机表示模型。实际上,示例方法可以通过下面参考图8呈现的相同的通用方法400来整合或概括。
[0277]
方法400:
[0278]
方法400是使用变速驱动器控制电动机的方法。变速驱动器可以存储电动机的表示模型。电动机的表示模型可以包括电机参数组smp中电机参数的一个或多个初始估计值。电机参数组smp的示例在图9a中示出并且包括电机参数和的两个初始估计值。
[0279]
电机参数可被视为在执行本文提出的方法期间的恒定值。电机参数是电动机的固有参数。电机参数的值可以独立于电动机的操作点或者可以独立于施加到电动机的电气命令。即,对于电动机的两个不同操作点或对于施加到电动机的两个不同电气命令,电机参数可以被认为是恒定的。
[0280]
电参数组可以包括如上所示的电参数或机械参数或电参数和机械参数的组合。
[0281]
在一些示例中,电参数可以包括:
[0282]
电动机的定子电感ls,
[0283]
电动机的转子电感lr,
[0284]
电动机的互感lm,
[0285]
电动机的定子电阻rs,
[0286]
电动机的转子电阻rr,
[0287]
电动机的比电感l,
[0288]
电动机的漏电感lf,
[0289]
电动机的比电阻r
req
。
[0290]
不同的电感可以用亨利(h)来表示。不同的电阻可以用欧姆(ω)表示。
[0291]
在一些示例中,机械参数可以包括:
[0292]
电动机的电机惯性j,该电机惯性可用千克米平方(kg.m2)表示,
[0293]
电动机的负载扭矩τ
l
的负载参数k0,k1,
…km
,负载扭矩可以以牛顿(nm)表示。
[0294]
可以基于电动机的默认参数组来建立电动机的表示模型。在本公开中,建立表示模型应理解为在初始阶段表示模型的电机参数的初始估计值可以基于默认参数组进行估计。换言之,可以基于电动机的默认参数组来初始化电机参数组的电机参数的初始估计值。该默认参数组可以包括电动机的铭牌值。在一些示例中,该默认参数组可以包括标称电压、标称电流、标称频率、标称速度、功率因数、标称功率或满载速度中的一个或多个。如上所
述,本文提出的方法的目标之一是确定表示模型的电机参数的细化估计值,并使用它来确定vsd参数组,以便通过变速驱动器改进对电机的控制。在这种情况下,基于默认参数组初始化电机参数的初始估计值可以使用更少的操作点来提高vsd参数的确定精度,因为电机参数的初始估计值(在这种情况下为默认参数)将例如比随机参数值更接近于由这些方法确定的细化估计值。
[0295]
如方框410所示,方法400可以包括通过变速驱动器向电动机施加一个或多个电气命令,使得电动机在一个或多个确定的操作点运行。
[0296]
正如我们从上述示例方法中理解的那样,操作点的数量取决于电动机的表示模型。在一些示例中,在包括两个电机参数和一个等式的表示模型中,方法400可以包括施加两个不同的电气命令以达到两个不同的确定的操作点,以确定两个电机参数的细化估计值。
[0297]
如块420中所示,方法400可以包括由变速驱动器针对每个确定的操作点,基于变速驱动器在操作点处的测量值来确定电动机中的实际操作参数opr。
[0298]
实际操作参数
[0299]
实际操作参数opr是连接到估计操作参数ope的参数。
[0300]
在确定的操作点处的实际操作参数opr的值取决于电机参数的实际值mp和确定的操作点。在确定的操作点处的实际操作参数opr可以基于变速驱动器在确定的操作点处的测量值来估计。
[0301]
实际操作参数opr表示电动机在确定的操作点处的实际响应。
[0302]
在一些示例中,表示模型的实际操作参数的值可以基于电动机的实际电流i来确定,电动机的实际电流i与电动机在操作点的电流相对应并且由变速驱动器基于对电动机中的电流的测量值来确定。在一些示例中,实际电流i可以是与park坐标系中的实际电流i
dq
对应的向量。
[0303]
在一些示例中,表示模型的实际操作参数的值可以基于与电动机在操作点处的速度对应的电动机的转子速度ωr来确定,转子速度ωr由变速驱动器基于电动机在操作点的角位置来确定。
[0304]
在一些示例中,表示模型的实际操作参数的值可以基于电动机的实际电磁扭矩τ
em
确定,电动机的实际电磁扭矩τ
em
与由变速驱动器基于变速驱动器在操作点处的测量值确定的在操作点处的电动机的电磁扭矩对应。
[0305]
在一些示例中,可以基于电动机在操作点处的加速度来估计实际操作参数的值。可以基于电动机在所述操作点处的转子速度ωr测量值来确定加速度。
[0306]
在一些示例中,实际操作参数opr可以是实际向量(如基于vsd的测量值或确定值的实际),包括取决于操作点的电动机的若干实际值。在一些示例中,实际操作参数opr的值可以是实际向量的范数或量值,实际向量包括在操作点处的电动机的若干实际值。
[0307]
如块430中所示,方法400可以包括由变速驱动器针对每个确定的操作点基于电动机的表示模型的电机参数的估计值和与操作点相关联的电气命令来确定电动机中的估计操作参数。
[0308]
估计操作参数
[0309]
估计操作参数ope取决于施加到电动机以达到操作点的电气命令以及表示模型的电机参数的初始估计值估计操作参数ope表示电动机在确定的操作点处的理论响应。
[0310]
如上所述,估计操作参数ope是与实际操作参数opr相关联的参数。这里,“连接”应理解为估计操作参数ope和实际操作参数包括相同类型的值,或表示相同物理尺寸的值。
[0311]
在一些示例中,估计操作参数可以是包括若干估计值的估计向量,例如针对操作点确定的估计转子速度估计电流估计电磁扭矩和估计加速度在一些示例中,估计电流可以是对应于park坐标系中的估计电流的向量。
[0312]
在一些示例中,估计操作参数ope的值可以是包括针对操作点确定的电机参数的若干估计值的估计向量的范数或量值。
[0313]
如块440中所示,方法400可以包括针对每个确定的操作点基于实际操作参数opr和估计操作参数ope计算操作差opd。
[0314]
操作差
[0315]
操作差opd是在确定的操作点估计操作参数和实际操作参数之间的差(opd=ope opr)。因此,操作差可以表征表示模型的电机参数组smp的初始估计值与电机参数的实际值mp之间的差。因此,表示模型的电机参数的初始估计值越准确(即接近实际值mp),操作差的绝对值越低。
[0316]
因此,可以通过最小化电动机的不同操作点的操作差opd来找到电机参数的细化估计值最小化操作差包括修改电机参数组的电机参数的初始估计值
[0317]
在估计操作参数ope和实际操作参数opr分别为估计矢量和实际矢量的情况下,操作差可以是估计矢量和实际矢量之间的距离。在一些示例中,操作差可以是估计向量和实向量的范数或量值之间的差。
[0318]
如块450中所示,方法400可以包括由变速驱动器针对每个确定的操作点,基于操作差opd和电动机的表示模型来确定至少一个操作系数的值。操作系数的数量取决于表示模型的电机参数的数量和表示模型的等式的数量。
[0319]
操作系数
[0320]
操作系数可以与表示模型的电机参数和/或操作点相关联。操作系数oc可以代表电机参数的初始估计值与表示模型中电机参数的实际值mp之间的连接。图9b中说明了说明此联系的示例。电机参数mp1的估计值和实际值mp1连接到操作系数oc1,而电机参数mp2的估计值和实际值mp2连接到操作系数oc2,如箭头所示。
[0321]
操作系数oc的值取决于电动机的操作点和表示模型。可以在确定的操作点处基于电机参数的初始估计值估计操作参数ope和实际操作参数opr来估计每个操作系数oc的值。
[0322]
将块450连接到块410的方法400的箭头说明了以下事实:变速驱动器通过块410-450运行至少一次以确定与至少一个确定的操作点中的每一个相关联的至少一个操作系数。
[0323]
如块460中所示,方法400可以包括由变速驱动器基于在每个操作点确定的至少一个操作系数oc和基于表示模型来确定表示模型的至少一个电机参数的细化估计值。至少一电机参数对应于与至少一操作系数连接的电机参数。如以上示例方法中所示,至少一个电机参数还取决于电机的表示模型。确定细化估计值可以例如基于求解系统或者可以基于作为递归最小二乘算法的线性回归模型。
[0324]
如块470中所示,方法400可以包括由变速驱动器基于至少一个电机参数的细化估计值确定vsd参数组的值,该vsd参数组包括至少两个vsd参数。
[0325]
vsd参数:
[0326]
在本公开中,vsd参数应理解为用于控制电动机的变速驱动器的输入参数。vsd参数对应于电动机的参数。在一些示例中,vsd参数可以包括电气或机械参数。
[0327]
确定精确的vsd参数组可以改进变速驱动器对电动机的控制。
[0328]
在一些示例中,vsd参数组可以包括定子电阻rs、空载电流iv、漏电感lf、转子时间常数tr、负载扭矩τ
l
和电动机的电机惯性j。
[0329]
如上所述,该vsd参数组的值可以基于表示模型的电机参数直接或间接地确定。
[0330]
这里,直接确定的意思是vsd参数的值直接等于表示模型的电机参数组smp的电机参数的细化估计值。这里,间接确定的意思是可以基于电机参数的细化估计值来确定vsd参数的值。
[0331]
基于电机参数的细化估计值和获得的vsd参数组的示例如图9c所示。基于电机参数mp1的实际值直接获得vsd参数vsd1。基于电机参数mp1和mp2的实际值间接获得vsd参数。
[0332]
所确定的vsd参数组可以包括定子电阻rs、空载电流iv、漏电感lf、转子时间常数tr、负载扭矩τ
l
和电机惯性j中的至少两个。
[0333]
方法400允许实时计算适用于每个电动机的vsd参数组。该vsd参数组作为控制电动机的变速驱动器的输入,以适应的方式改进电动机的控制,因为vsd参数是基于每个电动机的电机参数的细化估计值确定的。
[0334]
方法400还可以包括基于所确定的至少一个电机参数的细化估计值更新电动机的表示模型。在本公开中,更新电机的表征模型应理解为与至少一个电机参数相关联的所确定的细化估计值代替表示模型中的至少一个电机参数的初始估计值。这允许实时改进电动机的表示模型。因此,在该方法的每次迭代中,在电动机的寿命期间改进了通过变速驱动器对电动机的控制。
[0335]
需要注意的是,为了方法400的新迭代的目的,代替表示模型中电机参数的初始估计值的电机参数的细化估计值成为表示模型的电机参数的初始估计值。该初始估计值(先前迭代的先前细化估计值)将更接近由方法400的新迭代确定的新细化估计值。
[0336]
方法400还可以包括:
[0337]
当至少一个操作系数与先前存储的至少一个操作系数之间的距离高于确定的阈值时,将至少一个操作系数的值存储到变速驱动器中。
[0338]
方法400允许通过对于不同操作点获得表示电动机的理论响应和电动机的实际响应之间的差的等式的系统来确定电动机的表示模型的电机参数的细化估计值。因此,确定
附加到操作点的操作系数与附加到另一个操作点的先前存储的操作系数相近意味着具有两个相似的等式,这将使电机参数的细化估计值的确定不太准确。
[0339]
然后,当距离高于确定的阈值时,至少一个操作系数的值可以用于确定表示模型的电机参数的细化估计值,并且可以与确定操作点一起存储到变速驱动器中。在一些示例中,当距离低于确定的阈值时,在确定电机参数的细化估计值时不使用至少一个操作系数的值,并且可以修改电气命令以达到另一个确定的操作点。
[0340]
方法400还可以包括向电动机的操作者建议操作点以通过执行方法400确定该vsd参数组。在一些示例中,方法400可以建议操作者选择电气命令以在低速和完全负荷的情况下达到确定的第一操作点并且在高速和低负荷的情况下达到第二操作点。
[0341]
方法400还可以在块450之前包括确定表示模型的性能值的块445。在本公开中,参数值应当理解为基于电气命令和电机参数的初始估计值的表征电动机的性能的值。性能值可以用百分比表示。在一些示例中,性能值可以基于表征电机参数误差的操作点处的操作差(|opd|)的绝对值和电气命令的值来确定。
[0342]
在一些示例中,方法400可以包括当性能值低于以百分比表示的确定阈值时继续执行方法400。在一些示例中,所确定的阈值可以包括在80%和95%之间并且可以优选地等于90%。在一些示例中,当性能值高于确定的阈值时,方法400可以包括停止其执行,并且在一些情况下,警告操作者通过变速驱动器对电动机的控制与期望的一样精确。
[0343]
方法400还可以包括基于存储的vsd参数组来控制电动机。该存储的vsd参数组可以存储在变速驱动器的存储器中。可以在方法400的每次迭代时基于包括至少两个vsd参数的所确定的vsd参数组来更新存储的vsd参数组,以便在每次迭代时细化存储的vsd参数组。
[0344]
也可以为电动机分配类型。该类型可以例如包括电动机的范围、制造年份、生产地点。因此,方法400可以包括存储电动机数据集,该电动机数据集包括所确定的vsd参数组、电动机的类型和电动机的运行时间。运行时间可用操作小时数表示。在一些示例中,可以基于每个电动机的类型及其运行时间收集关于多个电动机的统计数据。
[0345]
本公开还提出了一种用于处理电动机的数据的方法,其中该数据包括多个电动机数据集。每个数据集可以与电动机相关联并且包括电动机的类型、电动机的vsd参数组以及电动机的运行时间。当方法400在多个电动机上执行时,可以根据方法400的实施例获得多个数据集。
[0346]
处理电动机数据的方法可以包括:
[0347]
基于电动机在运行期间的vsd参数组的演变,对电动机进行分类;和/或
[0348]
针对特定类型的电动机,基于包括特定类型的电动机的若干数据集,确定在确定的运行时间的预测的vsd参数组。
[0349]
基于电动机的vsd参数组随时间的演变对电动机进行分类可以例如允许识别与电动机的vsd参数演变相关的一些生产线不如其他生产线,因此识别此类生产线的一些潜在问题。
[0350]
在确定的运行时间确定预测的vsd参数组可以例如允许为由变速驱动器驱动的电动机设置准确的vsd参数组,该变速驱动器可能无法使用在此提出的方法。在这种情况下,可以根据电动机的具体类型和运行时间直接为电动机设置准确的vsd参数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1