一种巨型水电厂调速器功率的闭环控制方法与流程
1.本发明涉及一种巨型水电厂调速器功率闭环控制方法,属于调速器功率闭环技术领域。
背景技术:
2.目前水电厂调速器常用的控制模式为开度模式,在开度模式下小负荷调节速率缓慢、调节时间较长且调节不到位,调节速度和调节品质无法满足当前南方电网的要求。
3.当前云南电网为异步联网,大型水电机组负荷的快速调节会对云南电网造成一定的冲击,负荷调节速度较慢又无法满足南方电网的要求。现有技术的功率闭环控制逻辑如图1中的旧功率闭环所示,该功率闭环属于超前调节,监控系统以模拟量的形式下发功率给定pc给调速器,功率给定经过增速限制、积分环节1/s 处理后分两路控制,一路乘以前馈系数kp3计算出pgv并以开度的形式下发给调速器执行机构进行导叶的控制,另一路与功率反馈做差比较,再将结果乘以调差系数bp叠加在一次调频控制流程上。
4.现有的功率闭环负荷调节只有一套pid参数,无论大负荷调节或小负荷调节均用同一套参数,为了满足南网负荷调节速度的要求,pid参数只能设置较大,容易出现超调及引起云网频率波动的情况;为了尽可能的降低对云网异步联网的冲击,只能将功率闭环的pid参数放小,这就无法满足南网对负荷调节速度的要求。由于负荷的调节速度和调节稳定性存在的矛盾,在实际应用中存在较大的风险,这就使得功率闭环模式无法投入实际应用生产中。
5.为了提高水电机组功率闭环模式下调速器的调节速度和调节品质,并提高功率闭环的可靠性,以满足南方电网的要求,有必要研发水电厂调速器新型功率的闭环控制方法。
技术实现要素:
6.为解决上述问题,本发明提供一种巨型水电厂调速器功率的闭环控制方法,此调速器新型功率闭环控制方法是针对调速器功率闭环存在的问题,在未改变原有的部件情况下,对控制方法进行了优化和改进,以提升agc发电单元功率调节能力、机组系统调频能力,提升精益化管理水平,实现功率的快速、精准、稳定调节。本发明通过构建新型的功率闭环控制框架,在满足南方电网对负荷调节速度和调节品质要求的同时,也尽可能地避免对云南电网造成冲击。
7.本发明通过下列技术方案实现:一种巨型水电厂调速器功率闭环控制方法,包括下列操作:
8.(1)在主环控制流程中调速器的开度由三部分组成,分别为:一次调频计算出的开度pid输出、监控系统agc下发的开度pgv、机组空载开度ynld,每一部分的控制如下:
9.a、一次调频计算出的开度pid输出控制:机组频率给定fc与频率采样fg 进行做差比较计算出频率偏差,当频率偏差≤人工失灵区时,不进行调节,当频率偏差>人工失灵区时,将频率偏差套入下列公式:
[0010][0011]
式中,fc为机组频率给定,fg为频率采样,为实时变化,人工失灵区为预先设置的频率死区,通常设为0~
±
2%hz;
[0012]
再将上述公式计算出的频差量作为变量,通过下列传递函数,计算出对应的导叶开度ypid,并将该导叶开度下发给调速器执行机构从而进行导叶开度的控制:
[0013]
ypid=yp+yi+yd
[0014]
=频差量
×
kp+频差量
×
ki+频差量
×
kd
[0015]
其中,ypid为一次调频计算出的开度pid输出,yp为通过比例环节计算出的导叶开度,kp为主环的比例增益,设为0.01-20;yi为通过积分环节计算出的导叶开度,ki为主环的积分增益,设为0.01-10;yd为通过微分环节计算出的导叶开度,kd为主环的微分增益,设为0-10;
[0016]
b、监控系统agc下发的开度pgv:监控系统以模拟量或通讯量的方式下发功率给定pc给调速器,同时监控系统对下发的功率给定pc的准确性进行判断,当功率给定pc与调速器功率给定反馈值(即调速器检测接收到的功率值) 的偏差<5mw时,判断为指令正确,(旧功率闭环只以模拟量的形式下发功率给定,功率给定模拟量一直存在波动及跳变,且没有对下发的“功率给定pc”指令的准确性进行判断,存在较大的误调节的风险)当指令正确,监控下发执行令到调速器,调速器将功率给定pc与机组功率采样pg比较做差,形成功率偏差量,功率偏差经过事先设定的偏差限制和功率死区的参数处理,即,功率偏差量大于功率死区,需进行负荷的调节,功率偏差限制模块分2次进行功率调整,第一次功率调整量为装机容量
×
功率偏差限制,第二次功率调整量为功率偏差量-第一次功率调整量;
[0017]
选取其一模块,送入到快速调节模块或功率调节pid模块,并按照模块内部设定的控制逻辑进行计算,功率偏差经过两个模块的处理后,以pgv的形式下发给副环执行机构从而进行导叶开度的控制,直至将机组功率偏差调整至功率死区时不再调节;
[0018]
c、机组空载开度(ynld):机组空载开度与水头有关,控制操作保持不变;
[0019]
(2)副环控制流程是将在主环控制流程中得到的一次调频计算出的开度 (pid输出)、监控系统agc下发的开度(pgv)、机组空载开度(ynld)三者累加,并经过副环的比例增益kp”和副环的积分增益ki”处理,其中,kp”设为0.01-20、ki”设为0.01-20,再以电流的形式送至比例伺服阀,比例伺服阀按照电流的大小动作至相应的开度,电流4-20ma对应比例伺服阀从全关至全开,当电流为12ma时比例伺服阀阀芯在“中位”,4ma时伺服阀阀芯在全关位,20ma时伺服阀阀芯在全开位,从而控制主配压阀动作,最终使导叶接力器动作从而控制导叶的启闭。
[0020]
所述b步骤中选取其一模块是快速调节模块与功率调节pid模块自动切换选取,依据是:根据功率偏差的大小进行选择,如果pc-pg≥35mw,功率调节选择快速调节模块;如果,pc-pg<35mw,功率调节选择功率调节pid模块,以实现小偏差快速、稳定、精准控制。
[0021]
所述b步骤中快速调整模块的控制逻辑为:pgv=pgv
’±
trp;其中pgv’为上一个周期的监控系统agc下发的开度,pgv’=pc’—pg’;trp为增加和减少的步长,步长与功率偏差成正比,trp为预设值,设为0-10。
[0022]
所述b步骤中功率调节pid模块的控制逻辑为:当pc-pg<35mw时,功率偏差量’为:
[0023][0024]
再将上述公式计算出的功率偏差量’作为变量,通过下列传递函数,计算出对应的导叶开度ypid’并将该导叶开度下发给调速器执行机构从而进行导叶开度的控制:
[0025]
ypid’=yp’+yi’+yd’[0026]
=功率偏差量
’×
kp’/10+功率偏差量
’×
ki’/1000+功率偏差量
×
[0027]
kd’/2000
[0028]
其中,ypid’为下一个周期功率偏差计算出的开度,yp’为下一个周期通过比例环节计算出的导叶开度,kp’为下一个周期功率调节pid模块的比例增益,设为0.01-20;yi’为下一个周期通过积分环节计算出的导叶开度,ki’为下一个周期功率调节pid模块的积分增益,设为0.01-10;yd’为下一个周期通过微分环节计算出的导叶开度,kd’为下一个周期功率调节pid模块的的微分增益,设为0-10,计算出对应的开度并下发给副环执行机构从而进行导叶开度的控制。
[0029]
本发明通过以下三方面形成水电厂调速器新型功率闭环控制方法:
[0030]
1、采用负荷分段调节的方法提高了负荷的调节品质
[0031]
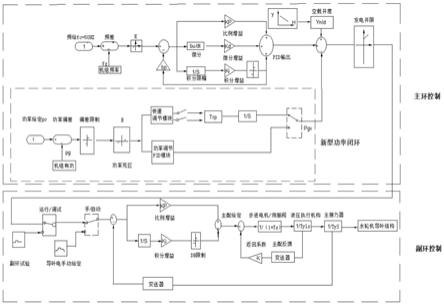
分段调节控制流程如图2红框内所示,分段调节即以功率的偏差量35mw 为分界点进行分两段式的调节,若pc-pg≥35mw即当功率偏差大于等于35mw 时,负荷调节通过程序内部的快速调节模块按照调速器触摸屏设置的调节速率计算出pgv,并将pgv以开度的形式下发给调速器执行机构从而控制水轮机导叶的启闭,以满足系统对调速器调节速度的要求;若pc-pg<35mw即当功率偏差小于35mw时负荷调节通过程序内部的功率调节pid模块按照调速器触摸屏上设置的pid调节参数计算出pgv,并将pgv以开度的形式下发给调速器执行机构从而控制水轮机导叶的启闭,以满足系统对调速器调节品质的要求。采用负荷分段调节的方法实现了在有限的调节时间内,高质量的完成负荷的调节,大大的提高了负荷的调节品质。
[0032]
2、采用单向握手及双通道控制模式提高了功率闭环模式的可靠性
[0033]
新型功率闭环采用单向握手及双通道控制模式进行控制即监控下发给调速器的功率给定以模拟量和通讯量两种方式下发,功率闭环模式下默认通讯量为主用,双通道互为冗余实现了监控侧与调速器侧的功率信号的传递,单通道故障后快速无扰切换至另一通道。单向握手即监控系统每次下发“功率给定”指令时要对本次下发的指令与上一次下发的指令进行做差比较,以判断本次下发的指令是否准确无误,确认指令无误后给调速器一个“执行令”信号,调速器收到“执行令”信号后负荷调节按照图2红框内的控制流程进行。采用单相握手及双通道控制模式在确保监控系统下发指令正确的前提下,进行调速器和监控系统信息的快速交互,提高了功率闭环模式的可靠性。
[0034]
3、采用快速调节模块的方法实现了负荷的快速调节
[0035]
快速调节模块内部设置一定的程序控制逻辑,(快速调节模块原理为: pgv=pgv
±
trp;其中trp为增加和减少的步长,步长与功率偏差成正比,系数可在调速器触摸屏上设置)当功率偏差量达到调节门槛时能够按照一定调节规律进行负荷快速调整,当负荷偏差小于阈值时,负荷的调节不通过快速调节模块。采用快速调节模块的方法实现了负荷的快速调节,提高了调速器的响应速度。
[0036]
本发明具备的优点及效果:
[0037]
1、本发明的水电厂调速器新型功率闭环控制方法,与旧功率闭环控制方法相比,算法简单直接,根据功率偏差进行分阶段快速调节,大大的缩短了负荷的调节时间,同时也避免了负荷的超调,提升机组调节品质。
[0038]
2、该套调速器新型功率闭环控制方法具备调节速度快、调节品质好等特点,在满足调节速度要求的同时也满足了系统对调速器调节品质的要求。可最大程度上确保水电厂在调速器改造后,机组agc的调频功能对南网辅助考核的有效适应。
[0039]
3、本发明提升了agc发电单元功率调节能力、机组系统调频能力,提升精益化管理水平,实现了功率的快速、精准、稳定调节。在满足南方电网对负荷调节速度和调节品质要求的同时,也最大限度的降低了对云南电网的影响。
附图说明
[0040]
图1为现有技术的功率闭环控制逻辑示意图;
[0041]
图2为本发明的功率闭环控制逻辑示意图。
具体实施方式
[0042]
下面结合实施例和附图对本发明做进一步说明。
[0043]
实施例1
[0044]
以程序段一个扫描周期为例;
[0045]
设定参数如下:机组单机装机容量为700mw,频率给定fc=50,频率采样 fg=49.9hz,频率的变化率为1%,功率给定pc=100mw,机组刚刚并网发电,功率采样pg=0mw,功率偏差限制为10%,功率死区为4.9mw(占装机总量 0.7%),当前水头下的空载开度为ynld=13%。
[0046]
因为刚并网发电,上一个周期的功率给定pc’=0mw,功率采样pg’=0mw.
[0047]
巨型水电厂调速器功率闭环控制方法:调速器控制分为主环控制和副环控制,如图2所示。
[0048]
(1)在主环控制流程中调速器的开度由三部分组成,分别为:一次调频计算出的开度(pid输出)、监控系统agc下发的开度(pgv)、机组空载开度 (ynld),每一部分的控制如下:
[0049]
a、一次调频计算出的开度(pid输出)控制:机组频率给定fc与频率采样fg进行做差比较计算出频率偏差,当频率偏差≤人工失灵区时,不进行调节,当频率偏差>人工失灵区时,将频率偏差套入下列公式:
[0050][0051][0052]
式中,fc为机组频率给定,fg为频率采样,为实时变化,人工失灵区为预先设置的频率死区,通常设为0.05hz;
[0053]
再将上述公式计算出的频差量作为变量,通过下列传递函数,计算出对应的导叶
开度ypid,并将该导叶开度下发给调速器执行机构从而进行导叶开度的控制:
[0054]
ypid=yp+yi+yd
[0055]
=频差量
×
kp+频差量
×
ki+频差量
×
kd
[0056]
=0.1%
×
1.8+0.1%
×
0.45+0.1%
×2[0057]
=0.425%
[0058]
其中,ypid为一次调频计算出的开度(pid输出),yp为通过比例环节计算出的导叶开度,kp为主环的比例增益,本例设为1.8;yi为通过积分环节计算出的导叶开度,ki为主环的积分增益,本例设为0.45;yd为通过微分环节计算出的导叶开度,kd为主环的微分增益,本例设为2;
[0059]
b、监控系统agc下发的开度(pgv):监控系统以模拟量或通讯量的方式下发功率给定pc给调速器,同时监控系统对下发的功率给定pc的准确性进行判断,当功率给定pc与调速器功率给定反馈值(即调速器检测接收到的功率值)的偏差<5mw时,判断为指令正确,当指令正确,监控下发执行令到调速器,调速器将功率给定pc与机组功率采样pg比较做差,形成功率偏差量,即 100-0=100mw,功率偏差经过事先设定的偏差限制10%和功率死区4.9mw的参数处理,即,功率偏差量为100mw,大于功率死区4.9mw,需进行负荷的调节,功率偏差限制为10%,即得到第一次功率调整量为700
×
10%=70mw,功率偏差限制模块分2次进行功率调整,第一次功率调整量为70mw,将机组功率由0mw调整至70mw,第二次功率调整量为30mw(功率偏差量100mw
‑ꢀ
第一次功率调整量70mw=30mw),将机组功率由70mw调整至100mw;
[0060]
本例功率给定pc为100mw,功率采样pg为0mw,pc-pg=100-0=100mw, 100≥35mw,功率调节选择快速调节模块;
[0061]
送入到快速调节模块,快速调整模块的控制逻辑为:pgv=pgv’+trp;其中 pgv’为上一个周期的监控系统agc下发的开度,pgv’=pc’—pg’;trp为增加和减少的步长,步长与功率偏差成正比,trp为预设值,本例中trp为1.5%/s,得到本例的pgv=pgv’+trp=0+1.5=1.5%;
[0062]
并按照模块内部设定的控制逻辑进行计算,功率偏差经过两个模块的处理后,以pgv的形式下发给副环执行机构从而进行导叶开度的控制,直至将机组功率偏差调整至功率死区时不再调节;
[0063]
更进一步地,当第一次功率调整后,此时功率采样pg变为70mw,pc-pg <35mw,此时功率调节选择功率调节pid模块,功率调节pid模块的控制逻辑为:当pc-pg<35mw时,功率偏差量’为:
[0064][0065]
之后的扫描周期中,当第一次功率调整后,pc-pg=100mw-70mw=30mw,即,由70mw调整至100mw时功率的偏差为30mw,将其代入上述公式如下:
[0066][0067]
再将上述公式计算出的功率偏差量’作为变量,通过下列传递函数,计算出对应的
导叶开度ypid’并将该导叶开度下发给调速器执行机构从而进行导叶开度的控制:
[0068]
ypid’=yp’+yi’+yd’[0069]
=功率偏差量
’×
kp’/10+功率偏差量
’×
ki’/1000+功率偏差量
×ꢀ
kd’/2000
[0070]
=4.29%
×
0.4/10+4.29%
×
0.3/1000+4.29%
×
1/2000
[0071]
=0.172887%
[0072]
其中,ypid’为下一个周期功率偏差计算出的开度,yp’为下一个周期通过比例环节计算出的导叶开度,kp’为下一个周期功率调节pid模块的比例增益,本例设为0.4;yi’为下一个周期通过积分环节计算出的导叶开度,ki’为下一个周期功率调节pid模块的积分增益,本例设为0.3;yd’为下一个周期通过微分环节计算出的导叶开度,kd’为下一个周期功率调节pid模块的的微分增益,本例设为1,计算出对应的开度并下发给副环执行机构从而进行导叶开度的控制。
[0073]
c、机组空载开度(ynld):机组空载开度与水头有关,控制操作保持不变;
[0074]
(2)副环控制流程是将在主环控制流程中得到的一次调频计算出的开度 (pid输出)、监控系统agc下发的开度(pgv)、机组空载开度(ynld)三者累加,即0.425%+1.5%+13%=14.925%,并经过副环的比例增益kp”,本例设为8、副环的积分增益ki”,本例设为1.5处理后以电流的形式送至比例伺服阀,比例伺服阀按照电流的大小动作至相应的开度,电流4-20ma对应比例伺服阀从全关至全开,当电流为12ma时比例伺服阀阀芯在“中位”,4ma时伺服阀阀芯在全关位,20ma时伺服阀阀芯在全开位,从而控制主配压阀动作,最终使导叶接力器动作从而控制导叶的启闭。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1