基于肌电信号的六自由度机械手的电路结构的制作方法
1.本实用新型涉及机器人技术领域,特别地,涉及一种基于肌电信号的六自由度机械手的电路结构。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3.在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。工业机械手机器人的一个重要分支。
4.经过检索,专利文献cn111037592a公开了一种灵活型仿生机械手,包括手掌、与手掌可转动连接的若干根手指和驱动装置;若干根手指之间为并联结构,每根手指由指根单元、若干个指节单元和指尖单元相互通过转动轴串联组成;在每根手指中,所述指根单元与指节单元之间、指节单元之间以及指节单元与指尖单元之间均通过驱动装置驱动,使得指根单元与指节单元之间相互运动、指节单元之间相互运动以及指节单元与指尖单元之间相互运动,实现手指弯曲或伸直。该现有技术的不足之处在于采用多个驱动装置进行驱动,耗电量高,并且机械爪的设计不利于抓取工作,同时不能实现机械手电路的过放和短路保护。
5.因此,亟需研发一种既具有电池保护功能,又能够节约耗能提升效率去实现机械手的抓取工作。
技术实现要素:
6.针对现有技术中的缺陷,本实用新型的目的是提供一种基于肌电信号的六自由度机械手的电路结构。
7.根据本实用新型提供的一种基于肌电信号的六自由度机械手的电路结构,包括:电源、电源保护电路、总控电路、肌电传感器电路和手指控制电路组;
8.其中,电源的输出端与电源保护电路的输入端串联;电源保护电路的输出端与手指控制电路组串联;手指控制电路组包括拇指控制电路、食指控制电路、中指控制电路、无名指控制电路和小指控制电路,拇指控制电路、食指控制电路、中指控制电路、无名指控制电路和小指控制电路并联;
9.总控电路的输入端与电源保护电路的输出端串联,总控电路的输出端与肌电传感器电路串联,总控电路的输出端与手指控制电路组串联。
10.优选地,电源保护电路的输入端的正、负极连接电源的正、负极;电源保护电路的芯片u2输出端的正、负极分别与总控电路、肌电传感器电路、手指控制电路组的各输入端的
正负极相连,芯片u2的型号为tps259261drcr。
11.优选地,总控电路包括微控制器mcu、降压电路和通讯控制器,总控电路的微控制器mcu通过adc连接肌电传感器电路中肌电传感器产生的信号,通过通讯控制器mcu与手指控制电路组连通。
12.优选地,肌电传感器电路包括主控电路、4通道放大电路和通信电路,主控电路分别与4通道放大电路和通信电路相连。
13.优选地,拇指控制电路、食指控制电路、中指控制电路、无名指控制电路和小指控制电路的电路结构相同。
14.优选地,食指控制电路包括通讯电路、主控电路、电机驱动电路、电机位置编码器电路、电机电流采样电路、母线电压采样电路、电机温度采样电路和mos管温度采样电路,主控电路与通讯电路、电机驱动电路、电机位置编码器电路、电机电流采样电路、母线电压采样电路、电机温度采样电路和mos管温度采样电路并联;电机电流采样电路、母线电压采样电路、电机温度采样电路和mos管温度采样电路并联;电机位置编码器电路与所述电机电流采样电路串联。
15.优选地,若电源输出端的电压低于设定阈值或输出端的电流大于设定阈值,则电源保护电路的输出端处于断开状态。
16.与现有技术相比,本实用新型具有如下的有益效果:
17.1、本实用新型通过采用增加电源保护电路实现电池的过放和短路保护。
18.2、本实用新型通过采用肌电传感器实现人与机械手手指的运动交互。
19.3、本实用新型通过采用具有编码器和电流反馈功能的电机驱动板实现手指的位置、速度和力控。
附图说明
20.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
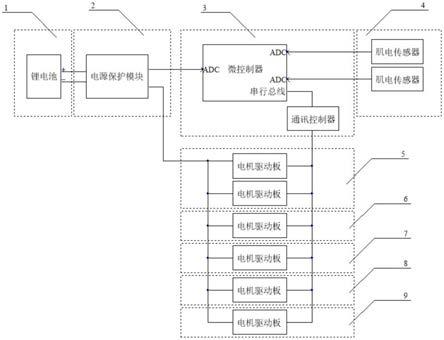
21.图1为本实用新型中的整体电路结构图;
22.图2为本实用新型中的电源保护电路示意图;
23.图3为本实用新型中的总控电路示意图;
24.图4为本实用新型中的肌电传感器电路中的电源电路示意图;
25.图5为本实用新型中的肌电传感器电路中的主控电路示意图;
26.图6为本实用新型中的肌电传感器电路中的4通道放大电路示意图;
27.图7为本实用新型中的肌电传感器电路中的通信电路示意图;
28.图8为本实用新型中的各手指控制电路的电源电路示意图;
29.图9为本实用新型中的各手指控制电路的通讯电路示意图;
30.图10为本实用新型中的各手指控制电路的主控电路示意图;
31.图11为本实用新型中的各手指控制电路的电机驱动电路示意图;
32.图12为本实用新型中的各手指控制电路的电机位置编码器电路示意图;
33.图13为本实用新型中的各手指控制电路的母线电压采样电路示意图;
34.图14为本实用新型中的各手指控制电路的电机温度采样电路示意图;
35.图15为本实用新型中的各手指控制电路的mos管温度采样电路示意图。
36.图中:
37.具体实施方式
38.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
39.如图1
‑
15所示,本实用新型提供了一种基于肌电信号的六自由度机械手的电路结构,电源1、电源保护电路2、总控电路3、肌电传感器电路4和手指控制电路组,其中,电源1的输出端与电源保护电路2的输入端串联;电源保护电路2的输出端与手指控制电路组串联;手指控制电路组包括拇指控制电路5、食指控制电路6、中指控制电路7、无名指控制电路8和小指控制电路9,拇指控制电路5、食指控制电路6、中指控制电路7、无名指控制电路8和小指控制电路9并联;总控电路3的输入端与电源保护电路2的输出端串联,总控电路3的输出端与肌电传感器电路4串联,总控电路3的输出端与手指控制电路组串联。
40.进一步来说,电源保护电路2的输入端的正、负极连接电源1的正、负极;电源保护电路2的芯片u2输出端的正、负极分别与总控电路3、肌电传感器电路4、手指控制电路组的各输入端的正负极相连,芯片u2的型号为tps259261drcr,该芯片u2具有可设置欠压锁定和过流保护功能。
41.总控电路3包括微控制器mcu、降压电路和通讯控制器,总控电路3的微控制器 mcu通过adc连接肌电传感器电路4中肌电传感器产生的信号,通过通讯控制器mcu 与手指控制电路组连通。
42.肌电传感器电路4包括电源电路、主控电路、4通道放大电路和通信电路,电源电路和主控电路、4通道放大电路和通信电路相连,为其提供电源。金属触点连接到四通道放大电路输入端进行放大处理。主控电路连接四通道放大电路采集经过放大的肌电信号,并进行数据处理,主控电路连接通信电路,将处理后的数据传递给总控电路。
43.继续进一步来说,拇指控制电路5、食指控制电路6、中指控制电路7、无名指控制电路8和小指控制电路9的电路结构相同。
44.食指控制电路6包括电源电路、通讯电路、主控电路、电机驱动电路、电机位置编码器电路、电机电流采样电路、母线电压采样电路、电机温度采样电路和mos管温度采样电路,电源电路连接通讯电路、主控电路、电机驱动电路、电机位置编码器电路、电机电流采样电路、母线电压采样电路、电机温度采样电路和mos管温度采样电路,为其供电。主控电路连接
电机驱动电路,给电机提供驱动电流。主控电路连接电机位置编码器电路,获取电机的角度。主控电路连接电机电流采样电路对电机电流实行反馈控制。主控电路连接母线电压采样电路,通过检测母线电压判断母线电压是否出现故障。主控电路连接电机温度采样电路,实现电机的过热保护。主控电路连接mos管温度采样电路,实现mos管过热保护。
45.其中,拇指控制电路5具有2个自由度,每个自由度通过编码器实时反馈位置以实现位置和速度闭环,可通过设置电流实现力控。食指控制电路6具有1个自由度,通过编码器实时反馈位置以实现位置和速度闭环,可通过设置电流实现力控。中指控制电路 7具有1个自由度,通过编码器实时反馈位置以实现位置和速度闭环,可通过设置电流实现力控。无名指控制电路8具有1个自由度,通过编码器实时反馈位置以实现位置和速度闭环,可通过设置电流实现力控。小指控制电路9具有1个自由度,通过编码器实时反馈位置以实现位置和速度闭环,可通过设置电流实现力控。
46.主控电路与通讯电路、电机驱动电路、电机位置编码器电路、电机电流采样电路、母线电压采样电路、电机温度采样电路和mos管温度采样电路并联;电机电流采样电路、母线电压采样电路、电机温度采样电路和mos管温度采样电路并联;电机位置编码器电路与所述电机电流采样电路串联。
47.若电源1输出端的电压低于设定阈值或输出端的电流大于设定阈值,则电源保护电路2的输出端处于断开状态。
48.工作原理:
49.电源11输出端连接到电源保护电路2的输入端,若电源1的输出电压低于设定值 (如6.0v)或输出电流大于设定值(如3a),电源保护电路2的输出将会断开,以保护锂电池和后级电路。
50.控制电路3通过adc检测肌电传感器电路4产生的信号并规划控制逻辑,然后通过控制电路3内的通讯控制器与拇指控制电路5、食指控制电路6、中指控制电路7、无名指控制电路8和小指控制电路9进行通讯,实现手指的位置,速度和力矩控制。
51.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1