一种基于纵振模态的微小型超声电机
1.本实用新型涉及微特电机技术领域,特别涉及一种基于纵振模态的微小型超声电机,该超声电机利用超声激发弹性体共振合成锯齿波的原理,具有结构简单、尺寸小,速度快的特点,适用于微小空间内物体的精密定位以及驱动。
背景技术:
2.随着科学技术的发展,诸如航空航天工程、生物医学工程、超精密加工和微机电系统等高精尖技术领域对驱动装置提出了高精度、小体积、大行程等的要求,而压电驱动器因具有结构简单、精度高、响应速度快、不受电磁干扰等优点而受到广泛关注。由于单一压电元件输出的位移行程非常有限,研究人员基于步进累积的思想,提出了诸如超声、粘滑、冲击、尺蠖等不同的步进式驱动原理,并研制了相应的压电驱动器。在这其中,超声电机具有噪声小、响应快、输出力大等优点,具有较高的实用性。目前的直线超声电机尺寸仍然存在尺寸不够紧凑的问题,无法满足在极小空间尺寸中的定位要求。
技术实现要素:
3.本实用新型的目的在于提供一种基于纵振模态的微小型超声电机,其利用压电片作为动力源,结构设计灵活,可以实现超小尺寸的结构实现。采用超声共振合成锯齿波的方式驱动,具有结构简单紧凑、速度快、兼容性高的特点,可以实现在极小应用空间内对目标物体的精密定位。
4.本实用新型的上述目的通过以下技术方案实现:
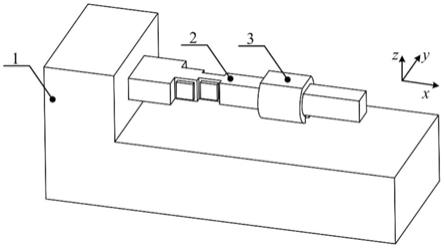
5.一种基于纵振模态的微小型超声电机,其特征在于:由底座1、定子2、动子3组成;所述的定子2固定连接在底座1上,所述的动子3以自适应预紧的方式夹持在定子2中的弹性体2
‑
3上。
6.所述的定子2由压电片a2
‑1‑
1、压电片b2
‑1‑
2、压电片c2
‑2‑
1、压电片d2
‑2‑
2组成;所述的压电片a2
‑1‑
1和压电片b2
‑1‑
2分别粘贴在弹性体2
‑
3的纵振部位a2
‑3‑
2的上下表面;所述的压电片c2
‑2‑
1和压电片d2
‑2‑
2分别粘贴在弹性体2
‑
3的纵振部位b2
‑3‑
3的上下表面;
7.所述的弹性体2
‑
3由固定端2
‑3‑
1、纵振部位a2
‑3‑
2、纵振部位b2
‑3‑
3和传动杆2
‑3‑
4组成。
8.所述的动子3由开口3
‑
1、圆环臂3
‑
2、直梁3
‑
3和中空体3
‑
4组成。其中开口3
‑
1的作用是使得圆环臂3
‑
2具有一定的弹性,可以以自适应预紧的方式夹持在定子2中的柔性铰链机构2
‑
3上,直梁3
‑
3起到导向作用,并且在其上表面还可以放置其他被驱物体。
9.所述的一种基于纵振模态的微小型超声电机的驱动方法,主要包括以下步骤:
10.a)给定子2的压电片a2
‑1‑
1和压电片b2
‑1‑
2施加u=asin(4πft+φ1)的正弦电信号,激发纵振部位a2
‑3‑
2的纵振模态,产生沿x向的正弦机械振动;同时给压电片c2
‑2‑
1和压电片d2
‑2‑
2施加u=bsin(2πft+φ2)的正弦电信号,激发纵振部位b2
‑3‑
3的纵振模态,产
生正弦机械振动;纵振部位a2
‑3‑
2和纵振部位b2
‑3‑
3的机械振动进行耦合,使得传动杆2
‑3‑
4上产生沿x向的类锯齿波机械振动,传动杆2
‑3‑
4将以粘滑驱动原理驱动动子3产生沿x向的直线步进运动;
11.b)通过控制压电片a2
‑1‑
1、压电片b2
‑1‑
2和压电片c2
‑2‑
1、压电片d2
‑2‑
2的激励信号的幅值a、b和相位φ1、φ2,可以实现运动速度以及运动正反向的调节。
12.本实用新型的有益效果在于:通过本实用新型提供的一种基于纵振模态的微小型超声电机,可以实现在微小应用空间内对目标物体的精密驱动与定位,具有结构简单、尺寸微小、速度快、精度高、易于加工等特点,具有大规模生产以及商业化应用的潜力。
附图说明
13.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
14.图1为本实用新型的一种基于纵振模态的微小型超声电机整体结构示意图;
15.图2为本实用新型的定子结构示意图;
16.图3为本实用新型的弹性体结构示意图;
17.图4为本实用新型的动子结构示意图;
18.图中:1、底座;2、定子;2
‑1‑
1、压电片a;2
‑1‑
2、压电片b;2
‑2‑
1、压电片c;2
‑2‑
2、压电片d;2
‑
3、弹性体;2
‑3‑
1、固定端;2
‑3‑
2、纵振部位a;2
‑3‑
3、纵振部位b;2
‑3‑
4、传动杆;3、动子;3
‑
1、开口;3
‑
2、圆环臂;3
‑
3、直梁;3
‑
4、中空体。
具体实施方式
19.下面结合附图进一步说明本实用新型的详细内容及其具体实施方式。
20.参见图1至图4所示,一种基于纵振模态的微小型超声电机,其特征在于:由底座1、定子2、动子3组成;所述的定子2固定连接在底座1上,所述的动子3以自适应预紧的方式夹持在定子2中的弹性体2
‑
3上。
21.所述的定子2由压电片a2
‑1‑
1、压电片b2
‑1‑
2、压电片c2
‑2‑
1、压电片d2
‑2‑
2组成;所述的压电片a2
‑1‑
1和压电片b2
‑1‑
2分别粘贴在弹性体2
‑
3的纵振部位a2
‑3‑
2的上下表面;所述的压电片c2
‑2‑
1和压电片d2
‑2‑
2分别粘贴在弹性体2
‑
3的纵振部位b2
‑3‑
3的上下表面;
22.所述的弹性体2
‑
3由固定端2
‑3‑
1、纵振部位a2
‑3‑
2、纵振部位b2
‑3‑
3和传动杆2
‑3‑
4组成。
23.所述的动子3由开口3
‑
1、圆环臂3
‑
2、直梁3
‑
3和中空体3
‑
4组成。其中开口3
‑
1的作用是使得圆环臂3
‑
2具有一定的弹性,可以以自适应预紧的方式夹持在定子2中的柔性铰链机构2
‑
3上,直梁3
‑
3起到导向作用,并且在其上表面还可以放置其他被驱物体。
24.所述的一种基于纵振模态的微小型超声电机的驱动方法包括以下步骤:
25.a)给定子2的压电片a2
‑1‑
1和压电片b2
‑1‑
2施加u=asin(4πft+φ1)的正弦电信号,激发纵振部位a2
‑3‑
2的纵振模态,产生沿x向的正弦机械振动;同时给压电片c2
‑2‑
1和压电片d2
‑2‑
2施加u=bsin(2πft+φ2)的正弦电信号,激发纵振部位b2
‑3‑
3的纵振模态,产
生正弦机械振动;纵振部位a2
‑3‑
2和纵振部位b2
‑3‑
3的机械振动进行耦合,使得传动杆2
‑3‑
4上产生沿x向的类锯齿波机械振动,传动杆2
‑3‑
4将以粘滑驱动原理驱动动子3产生沿x向的直线步进运动;
26.b)通过控制压电片a2
‑1‑
1、压电片b2
‑1‑
2和压电片c2
‑2‑
1、压电片d2
‑2‑
2的激励信号的幅值a、b和相位φ1、φ2,可以实现运动速度以及运动正反向的调节。
27.以上所述仅为本实用新型的优选实例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡对本实用新型所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1