一种带倾角光伏跟踪系统的制作方法
1.本专利申请涉及光伏系统技术领域,特别是涉及一种带倾角光伏跟踪系统。
背景技术:
2.一般来说,太阳能电池是将太阳光能转为电能。利用光电效应发电的最小单位称电池片,通过串联或并联多个电池片发电的称为太阳能电池组件。光伏发电站是将若干个太阳能电池组件以串联或并联连接安装的结构组合。
3.太阳能利用是人类未来洁净能源利用的发展方向,款式各异的太阳能应用产品不断涌现。但实际生活中,太阳能利用还受到诸多限制,利用,现有太阳能光伏板大多以固定位置方向接收太阳光,会造成太阳能利用率低下;为此,我们提出一种带倾角光伏跟踪系统。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本专利申请的目的在于提供一种带倾角光伏跟踪系统,解决上述现有技术的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种带倾角光伏跟踪系统,包括两组平行布设的传动杆,所述传动杆沿长度方向上安装有不少于一组且与传动杆成倾斜布设的光伏组件,传动杆上活动安装有多个支撑架,其中一个传动杆的中部安装有启动使传动杆转动的回转减速驱动机构,两个传动杆之间安装有使两个传动杆同步转动的连杆组件,所述回转减速驱动机构通过plc控制器实现远程驱动控制,其中一个光伏组件上安装有太阳能跟踪传感器。
7.进一步的,所述传动杆包括两个方管,两个方管相邻的端部分别插接在接头的两端,接头通过螺栓与两个方管间隙连接。
8.进一步的,所述回转减速驱动机构包括套设在其中一个接头上的回转驱动盘以及用于驱动回转驱动盘转动的回转驱动电机,回转驱动盘的下端固定在其中一个支撑架的上端面上。
9.进一步的,所述连杆组件包括套接在接头上的连接板,两个连接板的下端通过销钉转动连接在连杆的两端。
10.进一步的,所述支撑架上安装有轴承,轴承的内圈套接在传动杆上;
11.所述支撑架的下端还连接有安装板,安装板为找平板或浮体。
12.进一步的,所述光伏组件包括两个位于传动杆两侧的光伏板,两个光伏板的下端通过两个c型钢固定连接,所述c型钢通过u型卡固定在传动杆上。
13.进一步的,所述传动杆穿过两个光伏板和两个c型钢围成的空隙处,其中一个c型钢抵在传动杆的下端面上,另一个c型钢抵在传动杆的上端面上。
14.进一步的,所述轴承包括上端面中部设有圆弧槽的底座,底座的上端连接有圆弧状的轴承盖,圆弧状的轴承盖与圆弧槽形成环形槽方管穿过环形槽,方管位于环形槽内的
一段四周外壁上贴合有轴承块,相对的两个轴承块通过螺杆穿过方管固定连接,轴承块的外壁呈与环形槽贴合的光滑弧形结构,轴承块两端向环形槽外延伸的端部连接有一体化成型的凸块,凸块卡在对应的底座和轴承盖的侧壁上。
15.进一步的,两个所述螺栓呈垂直布设,接头相对的侧壁上开设有供螺栓穿过的通孔,且通孔的直径大于螺栓的直径,所述螺栓位于接头外壁与方管内壁之间的一段上套接有垫片,垫片的两端分别贴合在接头的外壁与方管的内壁上。
16.进一步的,所述c型钢与传动杆贴合的端面设置有楔形块,楔形块的两端开设有供u型卡限位的限位槽。
17.与现有技术相比,本实用新型的有益效果是:
18.1、本带倾角光伏跟踪系统,通过启动回转减速驱动机构,带动与之连接的传动杆转动,光伏板随之转动,从而实现追踪太阳光,最大化利用了太阳能;
19.2、通过在两个传动杆上安装连杆组件,实现两个传动杆同步转动,通过一个回转减速驱动机构,实现两个传动杆上的光伏组件同步转动,节省能耗。
附图说明
20.图1为本实用新型立体结构示意图;
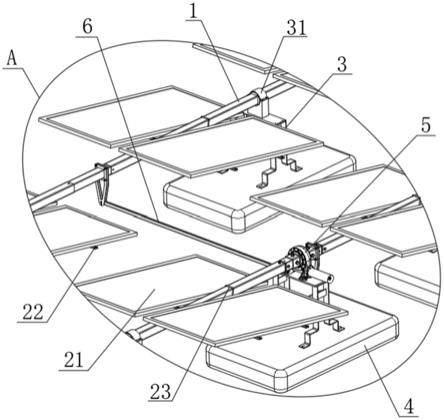
21.图2为本实用新型图1中a部放大结构示意图;
22.图3为本实用新型传动杆结构示意图;
23.图4为本实用新型光伏组件与传动杆组装立体结构示意图;
24.图5为本实用新型减速驱动机构立体结构示意图;
25.图6为本实用新型连杆组件立体结构示意图;
26.图7为本实用新型轴承立体结构示意图;
27.图8为本实用新型图7去除轴承盖后的立体结构示意图;
28.图9为本实用新型接头立体结构示意图;
29.图10为本实用新型传动杆与光伏组件安装结构示意图;
30.图11为本实用新型楔形块正视结构示意图。
31.附图标号说明:传动杆1、方管11、接头12、螺栓121、垫片122、光伏组件2、光伏板21、c型钢22、楔形块221、u型卡23、支撑架3、轴承31、底座311、轴承块312、螺杆313、轴承盖314、安装板4、回转减速驱动机构5、回转驱动盘51、回转驱动电机52、连杆组件6、连接板61、连杆62。
具体实施方式
32.以下通过特定的具体实例说明本专利申请的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本专利申请的其他优点与功效。本专利申请还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本专利申请的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
33.请参阅图1-11,本实用新型提供一种技术方案:
34.一种带倾角光伏跟踪系统,如图1和图2所示,包括两组平行布设的传动杆1,传动
杆1沿长度方向上安装有不少于一组且与传动杆1成倾斜布设的光伏组件2,传动杆1上活动安装有多个支撑架3,起支撑作用,支撑架3上安装有轴承31,如图2所示,轴承31的内圈套接在传动杆1上,支撑架3的下端还连接有安装板4,安装板4为找平板或浮体,当该跟踪系统设置在陆地上时,安装板4选用找平板,形成平稳支撑,当在水面时,安装板4选用浮体,用于漂浮在水面上,其中一个传动杆1的中部安装有启动使传动杆1转动的回转减速驱动机构5,回转减速驱动机构5通过plc控制器实现远程驱动控制,如图3和图5所示,回转减速驱动机构5包括套设在其中一个接头12上的回转驱动盘51以及用于驱动回转驱动盘51转动的回转驱动电机52,回转驱动盘51的下端固定在其中一个支撑架3的上端面上,其中一个光伏组件2上安装有太阳能跟踪传感器,plc控制器根据接收到太阳能跟踪传感器的信号,发出调控指令至回转驱动电机52,实现自动跟踪。
35.另外,两个传动杆1之间安装有使两个传动杆1同步转动的连杆组件6,如图6所示,连杆组件6包括套接在接头12上的连接板61,两个连接板61的下端通过销钉转动连接在连杆62的两端,连接板61位于接头12下方的一段设有镂空部,降低连接板61重量,减轻安装板4所受重力。
36.作为优选的,如图3示,传动杆1包括两个方管11,两个方管11相邻的端部分别插接在接头12的两端,接头12通过螺栓121与两个方管11间隙连接,起到调节间隙的作用,方便拆装,适用范围广,另,每个方管11可以由多个不同长度的方形管道通过接头12组装而成,适配不同风浪吹动。如图9所示,两个螺栓121呈垂直布设,接头12相对的侧壁上开设有供螺栓121穿过的通孔,且通孔的直径大于螺栓121的直径,实现间隙连接,防止刚性连接,在风浪的推动下,波动减小,螺栓121位于接头12外壁与方管11内壁之间的一段上套接有垫片122,垫片122的两端分别贴合在接头12的外壁与方管11的内壁上,垫片122为聚氨酯垫,起到缓冲保护的作用。
37.作为优选的,如图4所示,光伏组件2包括两个位于传动杆1两侧的光伏板21,两个光伏板21的下端通过两个c型钢22固定连接,c型钢22通过u型卡23固定在传动杆1上,传动杆1穿过两个光伏板21和两个c型钢22围成的空隙处,其中一个c型钢22抵在传动杆1的下端面上,另一个c型钢22抵在传动杆1的上端面上,如图10所示,c型钢22与传动杆1贴合的端面设置有楔形块221,如图11所示,楔形块221的两端开设有供u型卡23限位的限位槽,防止楔形块221脱落。
38.作为优选的,如图7和图8所示,轴承31包括上端面中部设有圆弧槽的底座311,底座311的上端连接有圆弧状的轴承盖314,圆弧状的轴承盖314与圆弧槽形成环形槽方管11穿过环形槽,方管11位于环形槽内的一段四周外壁上贴合有轴承块312,相对的两个轴承块312通过螺杆313穿过方管11固定连接,增加结构稳定性,轴承块312的外壁呈与环形槽贴合的光滑弧形结构,轴承块312两端向环形槽外延伸的端部连接有一体化成型的凸块,凸块卡在对应的底座311和轴承盖314的侧壁上,保证方管11位置固定,不偏移。
39.本带倾角光伏跟踪系统,通过启动回转减速驱动机构5,带动与之连接的传动杆1转动,光伏板21随之转动,从而实现追踪太阳光,最大化利用了太阳能;通过在两个传动杆1上安装连杆组件6,实现两个传动杆1同步转动,通过一个回转减速驱动机构5,实现两个传动杆1上的光伏组件2同步转动,节省能耗,同时,只用一个动力单元,降低安装板4所承受的重力,减少安装板4的数量,降低成本。
40.工作人员根据太阳光照射角度,通过plc控制器手动发出调控指令至回转驱动电机52,回转驱动电机52启动驱动回转驱动盘51转动,带动传动杆1转动,实现光伏板21转动,最大化接收太阳光。
41.另外,亦可以在光伏组件2上的两个光伏板21位于传动杆1下方的一段上安装太阳能跟踪传感器,太阳能跟踪传感器基本原理是利用对阳光的遮挡变化引起光电子器件的输出变化得到跟踪的方向,太阳跟踪传感器也是一种太阳位置传感器,plc控制器根据接收到太阳能跟踪传感器的信号,发出调控指令至回转驱动电机52,实现自动跟踪。
42.太阳能跟踪传感器安装在光伏组件2方阵上,与其同步运行,感知光伏板21状态角度。通过与当前太阳光线的指向角度实时对比,计算两者之间的偏差值,当偏差达到一定幅度时,太阳能跟踪传感器输出相应信号,plc控制器接收信号后开始进行纠偏,使光伏板21状态角度重新匹配太阳光线的指向角度,完成一次调整周期。
43.如此不断调整,时刻沿着太阳的运行轨迹追随太阳,实现自动跟踪。
44.光伏跟踪系统的基本原理是通过实时跟踪太阳运动轨迹,使太阳光线尽可能垂直入射光伏板21上,从而增加光伏板21接收到的太阳辐射量,提高太阳光伏发电系统的总体发电量,实现高效光能转换。
45.光伏跟踪系统从控制形式区分,可分为单轴跟踪和双轴跟踪,其中单轴跟踪有一个旋转自由度,双轴跟踪具有两个旋转自由度。
46.光伏跟踪系统采用的跟踪控制策略为主动式跟踪控制策略,通过计算得出太阳在天空中的方位,并控制光伏板21阵列朝向,使其最大限度地对准太阳,提高光伏系统发电量。
47.光伏自动跟踪系统采用步进跟踪方式,与连续跟踪方式相比,步进跟踪方式能够大大的降低跟踪系统自身能耗。
48.其中,plc控制器和太阳能跟踪传感器均为现有技术,为本领域技术人员所熟知,plc控制器可以为s7-300型号的控制器,太阳能跟踪传感器为隔板式太阳能位置传感器或金字塔式位置传感器。
49.上述实施例仅例示性说明本专利申请的原理及其功效,而非用于限制本专利申请。任何熟悉此技术的人士皆可在不违背本专利申请的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本专利申请所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本专利申请的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1