一种跨坐式单轨线路安全巡检机器人的制作方法
1.本实用新型涉及线路巡检设备技术领域,尤其涉及一种跨坐式单轨线路安全巡检机器人。
背景技术:
2.跨座式单轨,为单轨的一种,单轨系统属于城市轨道交通的一种制式。跨座式单轨是通过单根轨道支持、稳定和导向,车体釆用橡胶轮胎骑在轨道梁上运行的轨道交通制式。近年来,跨座式单轨系统在全国许多城市兴起修建,极大地改善了城市交通拥堵问题。为了保证车辆的安全,需要对其线路进行安全巡检。传统的巡检方法普遍采用的是人工巡检、手工记录的方式,需要工作人员逐塔巡视。这种方法费时费力,而且受恶劣的自然环境影响,工作条件艰苦、巡检周期长、效率低,同时,人工攀爬铁塔及上线检测对工作人员造成安全隐患。巡线机器人能够代替人工巡检、提高效率和检测精度、降低成本,大大提高作。
3.但现有的线路巡检机器人上线、下线操作复杂,影响使用效率,因此我们提出了一种跨坐式单轨线路安全巡检机器人用于解决上述问题。
技术实现要素:
4.本实用新型的目的是为了解决现有的线路巡检机器人上线、下线操作复杂,影响使用效率的缺点,而提出的一种跨坐式单轨线路安全巡检机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种跨坐式单轨线路安全巡检机器人,包括基板和定位板,所述基板的底部固定安装有摄像头和激光雷达,基板的顶部一侧固定安装有立板,立板的一侧转动安装有两个横轴,两个横轴上均固定安装有行走轮,所述定位板的顶部前后两侧均固定安装有支架,两个支架内均转动安装有定位轮,且支架的顶部四角均固定安装有定位杆,且定位板的顶部开设有方孔,所述立板与方孔滑动连接,所述定位板的底部开设有滑槽,滑槽内滑动安装有滑板,滑板的一侧固定安装有卡板,所述立板的一侧开设有卡槽,卡板活动卡接在卡槽内,且滑板的顶部开设有竖向槽,竖向槽内滑动安装有竖板,所述滑槽的顶部内壁上开设有插接槽,所述竖板活动卡接在插接槽内,所述竖板的底部固定连接有两个压簧,两个压簧的底端均固定连接在竖向槽的底部内壁上。
7.优选的,所述定位板的底部固定安装有导向框,导向框滑动套接在卡板的外侧。
8.优选的,所述竖板的底部固定连接有拉杆,拉杆的底端固定安装有拉环。
9.优选的,所述滑板的另一侧固定连接有两个复位弹簧,两个复位弹簧的一端均固定连接在滑槽的一侧内壁上。
10.优选的,所述滑板的另一侧固定安装有限位板,所述滑槽的一侧内壁上开设有限位孔,限位板滑动连接在限位孔内。
11.优选的,所述立板的另一侧固定安装有驱动电机,两个横轴中的一个横轴的一端固定连接在驱动电机的输出轴上。
12.本实用新型中,所述的一种跨坐式单轨线路安全巡检机器人,通过拉动拉环向下运动,从而带动拉杆和竖板向下运动,使得竖板脱离插接槽,然后拉动拉环向右运动,从而带动滑板向右运动,并对复位弹簧进行压缩,滑板带动卡板向右运动,使得卡板脱离卡槽,以解除对于定位板的固定然后相向移动定位板,从而带动两个定位轮向下运动,以便于将两个行走轮放置在输送线路上,然后通过推动定位板向上运动,从而带动两个定位轮向上运动,使得两个定位轮抵接在输电线路的下侧,然后,从而将装置固定输送电路上;
13.本实用新型中,所述的一种跨坐式单轨线路安全巡检机器人,通过驱动电机带动其中一个横轴和行走轮进行转动,从而使得设备在输电线路上移动,然后通过摄像头和激光雷达对线路进行巡检;
14.本实用新型结构设计合理,便于对跨坐式单轨线路安全巡检机器人进行上线和下线处理,操作简便,提升了使用效率,可靠性高。
附图说明
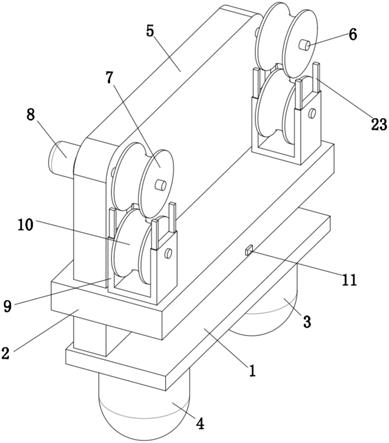
15.图1为本实用新型提出的一种跨坐式单轨线路安全巡检机器人的立体结构示意图;
16.图2为本实用新型提出的一种跨坐式单轨线路安全巡检机器人的剖视结构示意图;
17.图3为图2中a部分的局部放大图。
18.图中:1、基板;2、定位板;3、摄像头;4、激光雷达;5、立板;6、横轴;7、行走轮;8、电机;9、支架;10、定位轮;11、限位板;12、复位弹簧;13、滑板;14、卡板;15、卡槽;16、导向框;17、竖板;18、插接槽;19、竖向槽;20、拉杆;21、拉环;22、滑槽;23、定位杆。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.参照图1-3,一种跨坐式单轨线路安全巡检机器人,包括基板1和定位板2,基板1的底部固定安装有摄像头3和激光雷达4,基板1的顶部一侧固定安装有立板5,立板5的一侧转动安装有两个横轴6,两个横轴6上均固定安装有行走轮7,定位板2的顶部前后两侧均固定安装有支架9,两个支架9内均转动安装有定位轮10,且支架9的顶部四角均固定安装有定位杆23,且定位板2的顶部开设有方孔,立板5与方孔滑动连接,定位板2的底部开设有滑槽22,滑槽22内滑动安装有滑板13,滑板13的一侧固定安装有卡板14,立板5的一侧开设有卡槽15,卡板14活动卡接在卡槽15内,且滑板13的顶部开设有竖向槽19,竖向槽19内滑动安装有竖板17,滑槽22的顶部内壁上开设有插接槽18,竖板17活动卡接在插接槽18内,竖板17的底部固定连接有两个压簧,两个压簧的底端均固定连接在竖向槽19的底部内壁上。
21.本实用新型中,定位板2的底部固定安装有导向框16,导向框16滑动套接在卡板14的外侧,对卡板14进行导向。
22.本实用新型中,竖板17的底部固定连接有拉杆20,拉杆20的底端固定安装有拉环21,便于拉动竖板17的移动。
23.本实用新型中,滑板13的另一侧固定连接有两个复位弹簧12,两个复位弹簧12的一端均固定连接在滑槽22的一侧内壁上,对滑板13进行复位。
24.本实用新型中,滑板13的另一侧固定安装有限位板11,滑槽22的一侧内壁上开设有限位孔,限位板11滑动连接在限位孔内,对滑板13进行导向限位。
25.本实用新型中,立板5的另一侧固定安装有驱动电机8,两个横轴6中的一个横轴6的一端固定连接在驱动电机8的输出轴上,便于驱动行走轮7旋转,从而带动设备在输电线路上进行行走。
26.本实用新型中,在使用时,通过拉动拉环21向下运动,从而带动拉杆20和竖板17向下运动,使得竖板17脱离插接槽18,然后拉动拉环21向右运动,从而带动滑板13向右运动,并对复位弹簧12进行压缩,滑板13带动卡板14向右运动,使得卡板14脱离卡槽15,以解除对于定位板2的固定然后相向移动定位板2,从而带动两个定位轮10向下运动,以便于将两个行走轮7放置在输送线路上,然后通过推动定位板2向上运动,从而带动两个定位轮10向上运动,使得两个定位轮10抵接在输电线路的下侧,然后,从而将装置固定输送电路上,然后通过驱动电机8带动其中一个横轴6和行走轮7进行转动,从而使得设备在输电线路上移动,然后通过摄像头3和激光雷达4对线路进行巡检。
技术特征:
1.一种跨坐式单轨线路安全巡检机器人,包括基板(1)和定位板(2),其特征在于,所述基板(1)的底部固定安装有摄像头(3)和激光雷达(4),基板(1)的顶部一侧固定安装有立板(5),立板(5)的一侧转动安装有两个横轴(6),两个横轴(6)上均固定安装有行走轮(7),所述定位板(2)的顶部前后两侧均固定安装有支架(9),两个支架(9)内均转动安装有定位轮(10),且支架(9)的顶部四角均固定安装有定位杆(23),且定位板(2)的顶部开设有方孔,所述立板(5)与方孔滑动连接,所述定位板(2)的底部开设有滑槽(22),滑槽(22)内滑动安装有滑板(13),滑板(13)的一侧固定安装有卡板(14),所述立板(5)的一侧开设有卡槽(15),卡板(14)活动卡接在卡槽(15)内,且滑板(13)的顶部开设有竖向槽(19),竖向槽(19)内滑动安装有竖板(17),所述滑槽(22)的顶部内壁上开设有插接槽(18),所述竖板(17)活动卡接在插接槽(18)内,所述竖板(17)的底部固定连接有两个压簧,两个压簧的底端均固定连接在竖向槽(19)的底部内壁上。2.根据权利要求1所述的一种跨坐式单轨线路安全巡检机器人,其特征在于,所述定位板(2)的底部固定安装有导向框(16),导向框(16)滑动套接在卡板(14)的外侧。3.根据权利要求1所述的一种跨坐式单轨线路安全巡检机器人,其特征在于,所述竖板(17)的底部固定连接有拉杆(20),拉杆(20)的底端固定安装有拉环(21)。4.根据权利要求1所述的一种跨坐式单轨线路安全巡检机器人,其特征在于,所述滑板(13)的另一侧固定连接有两个复位弹簧(12),两个复位弹簧(12)的一端均固定连接在滑槽(22)的一侧内壁上。5.根据权利要求1所述的一种跨坐式单轨线路安全巡检机器人,其特征在于,所述滑板(13)的另一侧固定安装有限位板(11),所述滑槽(22)的一侧内壁上开设有限位孔,限位板(11)滑动连接在限位孔内。6.根据权利要求1所述的一种跨坐式单轨线路安全巡检机器人,其特征在于,所述立板(5)的另一侧固定安装有驱动电机(8),两个横轴(6)中的一个横轴(6)的一端固定连接在驱动电机(8)的输出轴上。
技术总结
本实用新型属于线路巡检设备技术领域,尤其为一种跨坐式单轨线路安全巡检机器人,针对现有的线路巡检机器人上线、下线操作复杂,影响使用效率的问题,现提出如下方案,其包括基板和定位板,所述基板的底部固定安装有摄像头和激光雷达,基板的顶部一侧固定安装有立板,立板的一侧转动安装有两个横轴,两个横轴上均固定安装有行走轮,所述定位板的顶部前后两侧均固定安装有支架,两个支架内均转动安装有定位轮,且支架的顶部四角均固定安装有定位杆,且定位板的顶部开设有方孔,立板与方孔滑动连接,所述定位板的底部开设有滑槽。本实用新型便于对跨坐式单轨线路安全巡检机器人进行上线和下线处理,操作简便,提升了使用效率。提升了使用效率。提升了使用效率。
技术研发人员:刘勇
受保护的技术使用者:刘勇
技术研发日:2021.11.02
技术公布日:2022/4/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1