一种集成化的太阳能智能跟踪电机的制作方法
1.本实用新型属于太阳能光伏发电领域,尤其是涉及一种集成化的太阳能智能跟踪电机。
背景技术:
2.随着太阳能光伏发电的深入发展,太阳能跟踪支架应用越来越普遍,相应的跟踪器也应用也越来越普遍,同时对作为重要部件的太阳能跟踪控制器提出了越来越高的要求。太阳能光伏发电系统中的跟踪系统用于根据太阳运行轨迹跟踪太阳,并实时调整跟踪支架的角度使得安装在跟踪支架上的太阳能光伏发电组件能够始终正对着太阳光照方向,从而提高光伏发电组件接收的太阳辐照量,增加太阳能光伏发电系统的发电量。
3.如公开号为cn106774441a的中国专利文献公开了一种太阳能跟日控制器,其特征在于:所述聚光装置中设置有跟日传感器;所述聚光装置整体通过支架安装在设有跟日控制器的聚光支架上;所述聚光装置中设置跟日传感器;聚光支架上安装有跟日控制器;通过跟日控制器控制外部电机、内部电机工作。
4.传统的光伏跟踪支架都是将跟踪支架和驱动电机以及跟踪控制器分别进行组装的,一般是电机和回转减速器组成一体,跟踪控制器固定安装在跟踪支架上,跟踪控制器采用外接倾角传感器或者内置倾角传感器的方式,来获取控制跟踪角度的反馈信号,并且要通过安装限位传感器进行限位保护,这种方案一般要求倾角传感器安装方式必须要与支架的布置方式相适应,特别是倾角传感器内置时,必须要求将跟踪控制器的箱体与支架正北方向严格一致,现场安装容易出错,并且倾角传感器和限位传感器不仅增加了控制器的成本,还大大增加了现场安装的难度和工作量。
技术实现要素:
5.本实用新型提供了一种集成化的太阳能智能跟踪电机,通过将跟踪控制器与电机进行集成化设计,大大降低了现场安装调试的难度,提高了现场效率。
6.一种集成化的太阳能智能跟踪电机,用于调整跟踪支架的角度使得安装在跟踪支架上的光伏发电组件始终正对着太阳光照方向,包括伺服电机单元和跟踪控制器单元,所述的跟踪控制器单元固定在伺服电机单元的后端;所述伺服电机单元前端的输出轴通过减速器与跟踪支架的横梁固定;所述的跟踪控制器单元包括计算单元模块、电机驱动模块、电源模块以及通讯模块;
7.所述的伺服电机单元上设有用于检测电机转动角度的角度传感器,所述计算单元模块的输入端分别与角度传感器、通讯模块和电源模块连接,所述计算单元模块的输出端分别与电机驱动模块、通讯模块连接,所述电机驱动模块与伺服电机单元连接。
8.本实用新型中,伺服电机单元可以采用直流无刷或有刷伺服电机,也可以是交流伺服电机。伺服电机单元可以实现正转反转控制,同时通过角度传感器可实时反馈输出角度信号。
9.进一步地,所述电源模块的输入端设有与外部交流电和光伏发电组件连接的输入接口;所电源模块的输出端分别与跟踪控制器单元的其他模块电连接。
10.进一步地,所述的跟踪控制器单元还包括电池模块,所述电池模块的输入端与电源模块的输出端连接,所述电池模块的输出端分别与跟踪控制器单元的其他模块电连接。
11.电源模块主要负责各个系统的供电功能,该模块将从外部获得电力输入,可以是交流电源,也可以直接从光伏组件取直流电,通过电源模块变换成稳定的直流输出,一方面给跟踪控制器各单元供电,一方面给电池模块进行充电。电池模块主要是为了保证在外接电源断开时,持续为电机驱动模块、计算单元模块、通讯模块等进行供电用的,保证跟踪控制器单元的安全运行。
12.进一步地,所述的通讯模块包含有线通讯模块和无线通讯模块。
13.进一步地,所述的有线通讯模块采用485通讯模块,所述的无线通讯模块采用lora或zigbee通讯模块,所述无线通讯模块的外部连接有信号天线。
14.进一步地,所述的伺服电机单元的输出轴与跟踪支架的横梁相互垂直布置。
15.本实用新型中,计算单元模块是跟踪控制器单元的大脑,通过读取电机反馈的当前角度信号,结合跟踪控制算法或通过通讯模块接收上位机指令,通过计算电机的目标角度输出电机驱动信号,给电机驱动模块发送控制指令。
16.与现有技术相比,本实用新型具有以下有益效果:
17.1、本实用新型通过将跟踪控制器与电机进行集成化设计,大大降低了现场安装调试的难度,提高了现场效率。
18.(2)本实用新型可通过伺服电机上角度传感器获得角度信号实时反馈,获取当前跟踪角度信息,减少了对外接倾角传感器和限位器的需求,降低了成本和实施难度。
19.(3)本实用新型可根据当地的经度、纬度、海拔、时间、电机与主梁初始标定位、电机与支架主梁的减速比关系等参数,实时计算当前太阳的方位角与高度角,进而计算出光伏板的最小入射角位置对应的光伏板角度,实现太阳能的最大化捕获。
附图说明
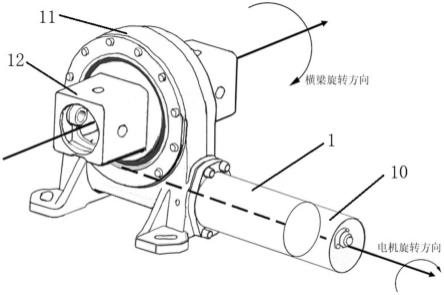
20.图1是本实用新型太阳能跟踪电机的整体结构示意图;
21.图2是本实用新型中伺服电机单元和跟踪控制器单元的内部模块连接示意图;
22.图3是本实用新型太阳跟踪控制算法逻辑程序图。
23.图中:1-伺服电机单元,2-电机驱动模块,3-计算单元模块,4-电池模块,5-电源模块,6-无线通讯模块,7-485有线通讯模块,8-信号天线,10-跟踪控制器单元,11-减速器,12-横梁。
具体实施方式
24.下面结合附图和实施例对本实用新型做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本实用新型的理解,而对其不起任何限定作用。
25.如图1所示,一种集成化的太阳能智能跟踪电机,包括伺服电机单元1和跟踪控制器单元10,跟踪控制器单元10固定在伺服电机单元1的后端;伺服电机单元1前端的输出轴通过减速器11与跟踪支架的横梁12固定。伺服电机单元1通过调整跟踪支架的角度使得安
装在跟踪支架上的光伏发电组件始终正对着太阳光照方向。
26.如图2所示,跟踪控制器单元10包括电机驱动模块2、计算单元模块3、电池模块4、电源模块5、无线通讯模块6、485有线通讯模块7、信号天线8。电源模块5可以为外部输入交流电源,也可以是直接从光伏组件组串直接取得直流电,电源模块5将外部输入电力转换成稳定的直流电源给电池模块4进行充电,同时为电机驱动模块2、计算单元模块3以及无线通讯模块6、485有线通讯模块7进行供电。计算单元模块3从伺服电机单元1的角度传感器上实时获取电机的当前角度信号。电池模块4在外接电源断开时要给跟踪控制器单元10的所有模块进行供电。无线通讯模块6、485有线通讯模块7负责与外部传感器连接以及和实现上位机通讯。
27.现场初始安装时要对电机安装初始位置进行标定,并将初始标定角度值θ写入计算单元模块3,如图1所示,伺服电机单元1与减速器11集成结构,电机的旋转方向和横梁12的旋转方向如图箭头所示,电机与减速器11的减速比γ,也要写入计算单元模块3,这样在初始位置θ和减速比γ给定的情况下,通过电机的角度信号实时计算可得到当前横梁12的角度δ。跟踪控制器单元10按照图3所示算法逻辑运行,保证跟踪电机实时跟踪太阳角度。
28.具体控制过程包括:计算单元模块3通过伺服电机单元1上角度传感器输出的角度信号得到电机的实际角度信号。计算单元模块3计算得到电机的目标角度,判断目标角度与实际角度是否相等,若否,则对目标角度数据以及实际角度数据进行处理,并根据处理结果通过电机驱动模块2,实现电机正转或反转,以保证太阳跟踪的精度。
29.以上所述的实施例对本实用新型的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本实用新型的具体实施例,并不用于限制本实用新型,凡在本实用新型的原则范围内所做的任何修改、补充和等同替换,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1