异常诊断系统的制作方法
异常诊断系统
相关申请的援引
1.本技术以2020年3月10日申请的日本专利申请2020-40584号专利为基础,在此援引其记载内容。
技术领域
2.本公开涉及一种进行电驱动系统的异常诊断的异常诊断系统。
背景技术:
3.近年来,随着航空器、车辆、船舶等移动体的电动化,驱动电动机的电驱动系统(eds:electric drive system)以装设于移动体的方式被使用。例如,有时装设具有电动机和逆变器电路的电驱动系统以使evtol(electric vertical take-off and landing aircraft:电动垂直起降飞行器)等电动航空器的旋转翼、船舶的螺旋桨、车辆或电车的车轮旋转驱动。在这样的电驱动系统中,与以往同样地,例如期望进行专利文献1所记载的电动机的故障诊断那样的异常诊断。在专利文献1中,在电动机或逆变器电路工作时对故障的发生进行检测,并且确定其发生部位。现有技术文献专利文献
4.专利文献1:日本专利特开2005-49178号公报
技术实现要素:
5.在专利文献1中,包括电动机或逆变器电路的电驱动系统在工作中对异常进行检测。但是,也可能存在在电驱动系统处于工作中的情况下难以发现的异常。例如,在电驱动系统包括对电动机的转矩、转速等进行检测的传感器的结构中,在电驱动系统的工作过程中难以发现该传感器的偏移异常。另外,安全机构(故障安全)的正常性确认试验在不满足相当于异常发生的特定条件时不能进行,另外,如果控制成在电驱动系统的工作中故意满足该条件,则存在对移动体的移动动作的影响非常大的问题。这样的问题不限于电驱动系统具有电动机的结构,在电驱动系统不具有电动机、与电动机分体的结构中也是共通的。因此,期望一种能够抑制对移动体的移动动作的影响并执行电驱动系统的异常诊断的技术。
6.作为本公开的一个方式,提供一种对驱动装设于移动体且用于上述移动体的移动的电动机的电驱动系统进行异常诊断的异常诊断系统。该异常诊断系统包括:信息获取部,上述信息获取部获取与上述电动机的输出状态相关联的信息即电动机输出关联信息;输出状态判定部,上述输出状态判定部利用上述电动机输出关联信息对上述电动机的输出状态是否为对上述移动体的移动没有帮助的低输出状态进行判定;以及诊断执行部,上述诊断执行部在判定为处于上述低输出状态的情况下,进行上述电驱动系统的异常诊断。
7.根据该方式的异常诊断系统,由于在判定为电动机的输出状态是对移动体的移动没有帮助的低输出状态的情况下进行电驱动系统的异常诊断,因此,能够抑制对移动体的
移动动作的影响并进行电驱动系统的异常诊断。
8.本公开还能以各种方式实现。例如,能够以装设电驱动系统的移动体、电动航空器、车辆、船舶、电驱动系统的异常诊断方法、用于实现上述装置或方法的计算机程序、存储有该计算机程序的非临时性存储介质等方式来实现。
附图说明
9.参照附图和以下详细的记述,可以更明确本公开的上述目的、其他目的、特征和优点。附图如下所述。图1是示意性地表示应用了作为本公开的一实施方式的电动驱动系统的电动航空器的结构的俯视图。图2是表示eds的功能性结构的框图。图3是表示与机身的动作种类对应的移动方向、驱动力及各电动机的工作状态的说明图。图4是表示第一实施方式中的异常诊断处理的步骤的流程图。图5是表示第一实施方式中的低输出状态处理的步骤的流程图。图6是表示第一实施方式中的诊断顺序确定处理的步骤的流程图。图7是表示第一实施方式中的诊断处理的步骤的流程图。图8是表示第一实施方式中的诊断处理的步骤的流程图。图9是表示第二实施方式中的低输出状态处理的步骤的流程图。图10是表示第三实施方式中的低输出状态处理的步骤的流程图。图11是表示第四实施方式中的低输出状态处理的步骤的流程图。
具体实施方式
10.a.第一实施方式:a1.装置结构:图1所示的电动航空器20也被称为evtol(electric vertical take-off and landing aircraft:电动垂直起降飞行器),是能够在铅垂方向起降且能够向水平方向推进的有人航空器。电动航空器20包括:机身21;九个旋转翼30;以及与各旋转翼对应地配置的九个电驱动系统10(以下,也称为“eds(electric drive system)10”)。
11.机身21相当于电动航空器20中的除了九个旋转翼30和eds 10以外的部分。机身21包括主体部22、主翼25和尾翼28。
12.主体部22构成电动航空器20的躯干部分。主体部22具有以机身轴线ax为对称轴线左右对称的结构。在本实施方式中,“机身轴线ax”是指穿过电动航空器20的重心位置cm且沿着电动航空器20的前后方向的轴线。另外,“重心位置cm”是指乘客未搭乘的空机重量时的电动航空器20的重心位置。在主体部22的内部形成有未图示的乘客室。
13.主翼25包括右翼26和左翼27。右翼26从主体部22向右方向延伸地形成。左翼27从主体部22向左方向延伸地形成。右翼26和左翼27上分别配置有一个旋转翼30及一个eds 10。尾翼28形成于主体部22的后端部。
14.九个旋转翼30中的五个配置于主体部22的上表面的中央部。上述五个旋转翼30主
要作为用于获得机身21的升力的浮起用旋转翼31a~31e起作用。浮起用旋转翼31a配置于与重心位置cm对应的位置。浮起用旋转翼31b和浮起用旋转翼31c在比浮起用旋转翼31a更靠前方的位置处配置在以机身轴线ax为中心彼此线对称的位置。浮起用旋转翼31d和浮起用旋转翼31e在比浮起用旋转翼31a更靠后方的位置处配置在以机身轴线ax为中心彼此线对称的位置。九个旋转翼30中的两个配置于右翼26和左翼27。具体而言,在右翼26的前端部的上表面配置有浮起用旋转翼31f,在左翼27的前端部的上表面配置有浮起用旋转翼31g。
15.九个旋转翼30中的另外两个分别配置于右翼26和左翼27,主要作为用于获得机身21的水平方向的推进力的推进用旋转翼32a、32b起作用。配置于右翼26的推进用旋转翼32a和配置于左翼27的推进用旋转翼32b配置在以机身轴线ax为中心彼此线对称的位置。各旋转翼30以各自的旋转轴线(后述的轴18)为中心相互独立被驱动而旋转。各旋转翼30分别具有彼此以等角度间隔配置的三个叶片。
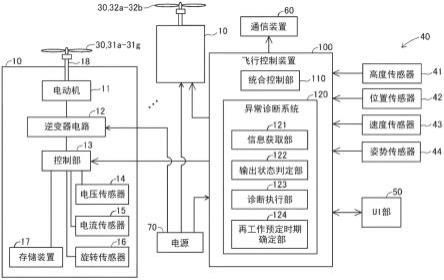
16.如图2所示,eds 10包括电动机11、逆变器电路12、控制部13、电压传感器14、电流传感器15、旋转传感器16、存储装置17和轴18。
17.电动机11经由轴18使旋转翼30旋转驱动。在本实施方式中,电动机11由三相交流无刷电动机构成,根据从逆变器电路12供给的电压和电流来使轴18旋转。另外,作为无电刷电动机的替代,也可以由感应电动机、磁阻电动机等任意种类的电动机构成电动机11。
18.逆变器电路12包括igbt(insulated gate bipolar transistor:绝缘栅双极晶体管)、mosfet(metal-oxide-semiconductor field-effect transistor:金属氧化物半导体场效应晶体管)等功率元件,根据与从控制部13供给的控制信号相应的占空比进行切换,从而向电动机11供给驱动电力。控制部13与后述的飞行控制装置100电连接,根据来自飞行控制装置100的指令向逆变器电路12供给控制信号。
19.控制部13整体地控制eds 10。具体而言,控制部13根据来自后述的统合控制部110的指示来生成驱动信号,并将该驱动信号供给至逆变器电路12。另外,控制部13使用各传感器14~16的检测值对逆变器电路12进行反馈控制。在本实施方式中,控制部13由具有cpu、rom、ram的微型计算机构成。
20.电压传感器14对从后述的电源70供给的电压进行检测。电流传感器15设置在逆变器电路12与电动机11之间,对电动机11的各相的驱动电流(相电流)进行检测。旋转传感器16对电动机11的转速进行检测。电压传感器14、电流传感器15和旋转传感器16的检测值按时间序列存储在存储装置17中,并且经由控制部13向飞行控制装置100输出。除了各种控制程序、各种传感器的检测值以外,在存储装置17中还记录有后述的诊断处理的结果、由用户执行的异常诊断结果的历史(以下,称为“诊断历史”)。
21.作为eds 10的控制模式,预先设定了起动模式、运行模式、结束模式、待机模式、异常模式、异常诊断模式。起动模式是电源刚接通后的动作模式,进行各传感器14~16的正常性检查等。运行模式是驱动电动机11的动作模式。运行模式还包括限制电动机11输出的省电模式(日文:
パワーセーブモード
)。结束模式是eds 10的电源断开时的动作模式。待机模式是指电源接通,等待驱动指示且未驱动电动机11的动作模式。异常模式是指eds 10被诊断为异常后的动作模式。异常诊断模式是指对eds 10的动作进行诊断时的动作模式,与后述的异常诊断处理不同,是在用户手动地进行eds 10的动作确认时设定的动作模式。上述这些控制模式根据来自统合控制部110的指令进行设定、或者由用户手动地设定。另外,这
些动作模式能够彼此重复地设定。例如,在发生eds 10的温度为阈值温度以上的温度异常的情况下,能够设定异常模式,并且能够设定省电模式。
22.如图2所示,在电动航空器20上装设有用于控制各eds 10或进行各eds 10的异常诊断的各种构成要素。具体而言,电动航空器20包括飞行控制装置100、传感器组40、用户界面部50(称为“ui部”50)、通信装置60和电源70。
23.飞行控制装置100整体地控制电动航空器20。飞行控制装置100构成为具有cpu、ram和rom的计算机。飞行控制装置100所具有的cpu通过在ram中展开预先存储在rom中的控制程序并执行,作为统合控制部110及异常诊断系统120起作用。
24.统合控制部110根据飞行程序或者根据乘客的操纵,对电动航空器20的驱动力的模式进行设定。作为电动航空器20的驱动力的模式,预先准备有第一驱动模式、第二驱动模式和第三驱动模式。第一驱动模式是通过电动机11的驱动来实现电动航空器20的垂直方向的升降的模式。第二驱动模式是通过电动机11的驱动来实现电动航空器20的水平方向的推进的模式。第三驱动模式是上述升降及推进都不实现的模式。该驱动力的模式也可以单独地设定,对于第一驱动模式和第二驱动模式,能够组合地设定。
25.如图3所示,例如,在飞行程序中,在作为机身的动作而执行“起降”时,机身的移动方向为铅垂方向,此时,统合控制部110将电动航空器20的驱动力的模式设定为第一驱动模式。另外,此时,统合控制部110对与浮起用旋转翼31a~31g对应的eds 10进行指示以驱动电动机11,并且对与推进用旋转翼32a~32b对应的eds 10进行指示以不驱动电动机11。其结果是,与浮起用旋转翼31a~31g对应的电动机11(以下,也称为“浮起用电动机”)工作,与推进用旋转翼32a~32b对应的电动机11(以下,也称为“推进用电动机”)停止。
26.另外,在作为机身的动作而执行“水平移动a”时,机身的移动方向为铅垂方向和水平方向,此时,统合控制部110将电动航空器20的驱动力的模式设定为第一驱动模式和第二驱动模式的组合。“水平移动a”包括在水平方向上移动且上升的动作、在水平方向上移动且维持高度的动作以及在水平方向上移动且下降的动作。例如,由于电动航空器20的水平方向的速度较低,为了维持高度,需要由电动机11的驱动产生的浮力,包括驱动浮起用电动机的动作。此时,统合控制部110对与浮起用旋转翼31a~31g和推进用旋转翼32a~32b对应的所有eds 10进行指示以驱动电动机11。其结果是,浮起用电动机和推进用电动机都工作。
27.另外,作为机身的动作的“水平移动b”仅在使浮起用电动机停止这一点上与上述水平移动a不同。即,统合控制部110将电动航空器20的驱动力的模式仅设定为第二驱动模式。与水平移动a同样地,“水平移动b”包括在水平方向上移动且上升的动作、在水平方向上移动且维持高度的动作以及在水平方向上移动且下降的动作。例如,包括由于电动航空器20的速度较高而不需要由电动机11驱动产生的浮力就能在水平方向上移动的动作或者滑翔的动作、不维持高度而自然地下降并在水平方向上移动的动作等。在这样的动作时,统合控制部110对与浮起用旋转翼31a~31g对应的eds 10进行指示以不驱动电动机11,并且对与推进用旋转翼32a~32b对应的eds 10进行指示以驱动电动机11。其结果是,浮起用电动机停止,推进用电动机工作。
28.另外,在作为机身的动作而执行“悬停(日文:
ホバリング
)”时,不存在机身的移动方向。此时,与起降时同样地,统合控制部110将电动航空器20的驱动力的模式仅设定为第一驱动模式,对与浮起用旋转翼31a~31g对应的eds 10进行指示以驱动电动机11,并且对
与推进用旋转翼32a~32b对应的eds 10进行指示以不驱动电动机11。其结果是,浮起用电动机工作,推进用电动机停止。
29.另外,作为机身的动作而执行“地面待机”时,当然不存在机身的移动方向。此时,统合控制部110将电动航空器20的驱动力的模式设定为第三驱动模式,并且对所有eds 10进行指示以不驱动电动机11。其结果是,浮起用电动机和推进用电动机都停止。
30.在此,在从统合控制部110向各eds 10发送的指令中,作为指令值,包括电动机11的目标转矩和目标转速。在各eds 10中,在从统合控制部110接收到该指令值时,控制部13对eds 10的控制模式进行设定,并且向逆变器电路12输出控制信号,以使电动机11的输出转矩及转速接近目标转矩及目标转速。此时,控制部13利用各传感器14、15、16以及未图示的转矩传感器的各检测值进行反馈控制来对逆变器电路12进行控制。
31.异常诊断系统120通过执行后述的异常诊断处理,进行各eds 10是异常还是正常的诊断(以下,称为“异常诊断”)。异常诊断系统120作为信息获取部121、输出状态判定部122、诊断执行部123、再工作预定时期确定部124起作用。信息获取部121获取电动机输出关联信息。电动机输出关联信息是指与电动机11的输出相关联的信息。在本实施方式中,电动机输出关联信息是指电动航空器20的驱动力的模式。如上所述,电动航空器20的驱动力的模式(第一驱动模式至第三驱动模式)与电动机11的输出相关,因此,该模式可以说是与电动机11的输出相关联的信息。输出状态判定部122对各电动机11的输出状态是否为低输出状态进行判定。在本实施方式中,“低输出状态”是指电动机11的输出对电动航空器20的升降或推进等的移动没有帮助的程度的状态。因此,例如,不限于电动机11的输出(转矩和转速)为零的情况,也可以包括大于零的情况。诊断执行部123通过执行后述的诊断处理,对各eds 10是异常还是正常进行判定。再工作预定时期确定部124对预定为处于低输出状态的电动机11不再处于低输出状态的时期、即开始对电动航空器20的移动有帮助的输出的预定时期(称为“再工作预定时期”)进行确定。在后面详细描述再工作预定时期的确定方法。
32.传感器组40包括高度传感器41、位置传感器42、速度传感器43和姿势传感器44。高度传感器41对电动航空器20的当前高度进行检测。位置传感器42将电动航空器20的当前位置确定为纬度和经度。在本实施方式中,位置传感器42由gnss(global navigation satellite system:全球导航卫星系统)构成。作为gnss,例如也可以使用gps(global positioning system:全球定位系统)。速度传感器43对电动航空器20的速度进行检测。姿势传感器44对机身21的姿势进行检测。在本实施方式中,姿势传感器44包括由三轴传感器构成的多个加速度传感器,对机身21的倾斜方向及滚转方向(日文:
ロール
方向)的姿势进行确定。
33.ui部50向电动航空器20的乘客提供用于控制电动航空器20和用于监视动作状态的用户界面。作为用户界面,例如包括键盘、按钮等操作输入部、液晶面板等显示部等。ui部50例如设置于电动航空器20的驾驶舱。乘务员能够使用ui部50来执行电动航空器20的动作模式的变更、各eds10的动作试验。
34.通信装置60与其他电动航空器、地面的指挥塔等进行通信。作为通信装置60,例如为民用vhf无线设备等。另外,除了民用vhf以外,通信装置60也可以构成为进行在ieee802.11中规定的无线lan、在ieee802.3中规定的有线lan等通信的装置。电源70由锂离子电池构成,且作为电动航空器20的电力供给源中的一个起作用。电源70经由各eds 10的
逆变器电路12向电动机11供给三相交流电力。另外,针对电源70,作为锂离子电池的替代,也可以由镍氢电池等任意的二次电池构成,作为二次电池的替代或除了二次电池以外,还可以由燃料电池或发电机等任意的电力供给源构成。
35.a2.异常诊断处理:图4所示的异常诊断处理是对各eds 10是异常还是正常进行判定的处理。异常诊断系统120在飞行控制装置100的电源接通时,执行异常诊断处理。
36.信息获取部121和输出状态判定部122执行各eds 10是否处于低输出状态的判定(以下,称为“低输出状态判定”)(步骤s105)。如图5所示,信息获取部121对电动航空器20的驱动力的模式进行确定(步骤s205)。如上所述,在本实施方式中,电动机输出关联信息是电动航空器20的动作模式。信息获取部121通过询问统合控制部110来获取电动航空器20的驱动力的模式。
37.输出状态判定部122对所确定的模式是否为第三驱动模式、即是否为电动航空器20的升降和推进都不实现的模式进行判定(步骤s210)。在判定为是第三驱动模式的情况下(步骤s210:是),输出状态判定部122判定为各电动机11处于低输出状态(步骤s215)。这是因为在电动航空器20的动作模式为第三动作模式的情况下,各电动机11停止。
38.在判定为不是第三驱动模式的情况下(步骤s210:否),输出状态判定部122对电动航空器20的驱动力的模式是否仅为第一驱动模式进行判定(步骤s220)。
39.在判定为电动航空器20的驱动力的模式为第一驱动模式的情况下(步骤s220:是),输出状态判定部122判定为与推进用旋转翼32a、32b对应的电动机11处于低输出状态(步骤s230)。如前面使用图3所说明的那样,仅为第一驱动模式的情况是指机身的动作为“起降”的情况,推进用旋转翼32a、32b不驱动,其输出对电动航空器20的移动(升降)没有帮助。因此,在本实施方式中,在这种情况下,对于与推进用旋转翼32a、32b对应的电动机11(推进用电动机),判定为处于低输出状态。
40.在判定为电动航空器20的驱动力的模式不是仅为第一动作模式的情况下(步骤s220:否),输出状态判定部122对电动航空器20的驱动力的模式是否仅为第二动作模式进行判定(步骤s225)。
41.在判定为电动航空器20的驱动力的模式仅为第二驱动模式的情况下(步骤s225:是),输出状态判定部122判定为与浮起用旋转翼31a~31g对应的电动机11处于低输出状态(步骤s235)。如前面使用图3所说明的那样,仅为第二驱动模式的情况是指机身的动作为“水平移动b”的情况,未驱动浮起用旋转翼31a~31g,其输出对电动航空器20的移动(水平方向的推进)没有帮助。因此,在本实施方式中,在这种情况下,对于与浮起用旋转翼31a~31g对应的电动机11(浮起用电动机),判定为处于低输出状态。
42.在判定为电动航空器20的驱动力的模式不是仅为第二驱动模式的情况下(步骤s225:否),输出状态判定部122判定为各电动机11不是处于低输出状态(步骤s240)。在这种情况下,机身的动作是图3所示的“水平移动a”,所有的旋转翼31被驱动。因此,在这种情况下,判定为任一个电动机11均不是处于低输出状态。在上述步骤s215、步骤s230、s235和s240结束之后,执行图4所示的步骤s110。
43.诊断执行部123根据步骤s105的结果,对是否存在低输出状态的电动机11进行判定(步骤s110)。在判定为不存在低输出状态的电动机11的情况下(步骤s110:否),处理返回
至上述步骤s105。与此相对,在判定为存在低输出状态的电动机11的情况下(步骤s110:是),诊断执行部123执行诊断顺序确定处理(步骤s115)。诊断顺序确定处理是指对进行异常诊断的顺序进行确定的处理。
44.如图6所示,诊断执行部123对低输出状态的电动机11是否为多个进行判定(步骤s305)。在判定为低输出状态的电动机11不是多个的情况下(步骤s305:否),由于仅该单个电动机11为诊断对象,因此,不决定诊断顺序,诊断顺序确定处理结束。
45.在判定为低输出状态的电动机11为多个的情况下(步骤s305:是),再工作预定时期确定部124对低输出状态的各电动机11的再工作预定时期进行确定(步骤s310)。在本实施方式中,再工作预定时期确定部124基于预先设定的飞行程序来确定再工作时期。例如,在电动航空器20在水平方向上推进中且在浮起用旋转翼30a~30e中的电动机11处于低输出状态情况下,基于飞行程序来确定电动航空器20接下来进行上升动作或下降动作的预定时期,并且将该预定时期确定为浮起用旋转翼30a~30e的再工作预定时期。另外,例如,即使在电动航空器20处于起动模式且判定为所有的电动机11处于低输出状态的情况下,也根据飞行程序来确定电动航空器20进行上升动作的预定时期,并且将该预定时期确定为浮起用旋转翼30a~30e的再工作预定时期。
46.诊断执行部123对具有再工作预定时期较早的电动机11的eds 10赋予更大的优先值(步骤s315)。这是为了通过对再工作预定时期较早的eds 10更早地进行异常诊断,以提高在再工作前发现异常的可能性。另外,这是为了对在再工作时异常诊断没有结束的情况进行抑制。此外,在该步骤s315及后述的步骤s320~s330中赋予的优先值被设定为彼此独立的值。
47.诊断执行部123对与浮起用旋转翼31a~31g对应的eds 10赋予比与推进用旋转翼32a~32b对应的eds 10更大的优先值(步骤s320)。例如,在所有的电动机11被判定为低输出状态且飞行程序表明所有的电动机11预定近期会再工作的情况下,对与浮起用旋转翼31a~31g对应的eds 10赋予比与推进用旋转翼32a~32b对应的eds 10更大的优先级。即使在电动航空器20的飞行中与推进用旋转翼32a~32b对应的eds 10发生异常的情况下,也不会直接导致电动航空器20的落下,与此相对,在与浮起用旋转翼31a~31g对应的eds 10发生异常的情况下,电动航空器20的落下的可能性提高。因此,与浮起用旋转翼31a~31g对应的eds 10异常时的影响比与推进用旋转翼32a~32b对应的eds 10异常时的影响大。因此,在本实施方式中,以与浮起用旋转翼31a~31g对应的eds 10为对象,通过比与推进用旋转翼32a~32b对应的eds 10更早地进行异常诊断,提高了在再工作前发现与异常发生时的影响更大的浮起用旋转翼31a~31g对应的eds 10的异常的可能性。
48.诊断执行部123对与浮起用旋转翼31a~31g对应的eds 10中的、与远离重心位置cm的位置的旋转翼30对应的eds 10赋予更大的优先值(步骤s325)。例如,在判定为图1所示的浮起用旋转翼31b和浮起用旋转翼31f处于低输出状态的情况下,对与远离重心位置cm的浮起用旋转翼31f对应的eds 10赋予比与浮起用旋转翼31b对应的eds 10更大的优先值。与靠近重心位置cm的旋转翼30(浮起用旋转翼)的异常相比,远离重心位置cm的旋转翼30(浮起用旋转翼)的异常对电动航空器20的姿势、飞行状态的稳定性造成更大的影响。因此,在本实施方式中,以与远离重心位置cm的旋转翼30(浮起用旋转翼)对应的eds 10为对象,通过更早地进行异常诊断,提高了在再工作前发现异常的可能性。
49.如图6所示,诊断执行部123对过去的诊断历史中的准异常的判断结果的次数更多的eds 10赋予更大的优先值(步骤s330)。“准异常”是指即使未诊断为异常,也是正常状态中的接近异常状态的状态。在判断为准异常的次数较多的情况下,之后成为异常状态的可能性较高。因此,以这样的成为异常状态的可能性较高的eds 10为对象,通过更早地进行异常诊断,提高了在再工作前发现异常的可能性。
50.诊断执行部123将在步骤s315~s330中对各eds 10分别赋予的优先值相加并计算合计优先值(步骤s335)。诊断执行部123以使在步骤s335中计算出的合计优先值越大的eds 10的诊断顺序越早的方式来决定诊断顺序(步骤s340)。此外,对于合计累加值相同的eds 10,也可以按照预先确定的顺序来决定诊断顺序。在步骤s340结束后,执行图4所示的步骤s120。
51.如图4所示,诊断执行部123对诊断条件是否成立进行判定(步骤s120)。“诊断条件”是成为进行异常诊断的前提的条件。在本实施方式中,诊断条件为“电源70的蓄电量为规定值以上”。在异常诊断中,会消耗对电动航空器20的移动没有帮助的电力。因此,在本实施方式中,在电源70的蓄电量比规定值少的情况下,不进行异常诊断,以避免对电动航空器20的移动造成影响。飞行控制装置100从对电源70的soc(state of charge:充电状态)进行检测的未图示的ecu接收电源70的soc值。然后,诊断执行部123基于接收到的soc值来判定诊断条件是否成立。在诊断条件不成立的情况下(步骤s120:否),再次执行步骤s120。即,在诊断条件成立之前等待处理。
52.在判定为诊断条件成立的情况下(步骤s120:是),诊断执行部123执行诊断处理(步骤s125)。此时,诊断执行部123按照在步骤s115中确定的顺序,对诊断对象的eds 10(以下,也称为“诊断对象eds 10”)执行诊断处理。
53.如图7所示,诊断执行部123从诊断对象eds 10获取各传感器14~16的检测值(步骤s405)。诊断执行部123对各检测值是否为预先确定的阈值以上进行判定(步骤s410)。在判定为任一个检测值为阈值以上的情况下(步骤s410:是),如图8所示,诊断执行部123判断为该eds 10为异常(步骤s455)。由于在诊断对象eds 10中电动机11处于低输出状态,因此,如果是各传感器14~16、控制部13、存储装置17等未发生异常的状态、即正常状态,则各传感器值为较低的值。这样,也可以通过实验或模拟等来确定正常状态下的各传感器14~16的值,将比该值大的值预先设定为上述步骤s410中的阈值。
54.如图7所示,在判定为各传感器14~16的所有的检测值不是阈值以上(小于阈值)的情况下(步骤s410:否),诊断执行部123对诊断对象eds 10指示构成控制部13的微型计算机的rom、ram等资源的检查(步骤s415)。作为该检查,例如为利用了校验的写入及读出的正常性检查等。由于是处理负荷较高的处理,因此,在电动机11处于低输出状态且控制部13中的异常处理以外的处理负荷较低的情况下执行这样的检查。诊断执行部123对步骤s415中的检查结果是否为合格进行判定(步骤s420)。在判定为检查结果不是合格的情况下(步骤s420:否),如图8所示,执行上述步骤s455,判断为该eds 10为异常。
55.在判定为检查结果为合格的情况下(步骤s420:是),诊断执行部123对诊断对象eds 10指示诊断用通电(步骤s425)。在诊断对象eds 10中,在接收到该指示时,控制部13经由逆变器电路12对电动机11进行诊断用的通电。诊断用通电是指用于异常诊断的向电动机11的通电。在本实施方式中,作为诊断用通电,控制部13向电动机11供给通电的结果为能够
抑制对电动机11的转矩造成影响的程度的规定大小的电流。具体而言,主要由不会对转矩造成影响的d轴电流构成,将q轴电流为规定值以下的预定大小的电流作为诊断用通电供给至电动机11。此外,作为诊断用通电,也可以供给高频图案的电流。
56.诊断执行部123从诊断对象eds 10获取各传感器14~16的检测值(步骤s430)。此时得到的检测值相当于对电动机11进行诊断用通电的状况下的各传感器14~16的检测值。诊断执行部123对在步骤s430中得到的检测值是否为正常值进行判定(步骤s435)。在本实施方式中,通过实验等预先确定在正常状态下进行诊断用通电时得到的各传感器14~16的检测值的范围。诊断执行部123在步骤s430中得到的检测值处于该范围内的情况下判定为正常值,在处于该范围外的值的情况下判定为不是正常值。在进行诊断用通电的情况下,如果是正常状态,则将电流值及电压值检测为比较低的值。另外,在进行诊断用通电的情况下,由于电动机11不进行旋转,因此,转速为零。
57.在判定为检测值不是正常值的情况下(步骤s435:否),执行上述步骤s455。与此相对,在判定为检测值为正常值的情况下(步骤s435:是),诊断执行部123执行故障安全功能诊断(步骤s440)。故障安全功能诊断是指故障安全功能的正常性的诊断。在本实施方式中,故障安全功能是指在发生电源70的端子电压(电源电压)的异常、逆变器电路12中的接通断开故障等的情况下,使供给至电动机11的电流为零来对电动机11的旋转进行抑制的功能。电源70的端子电压的异常能够检测为供给至逆变器电路12的电压的异常。另外,在逆变器电路12中发生了接通断开故障的情况下,能够检测为相电流的异常。控制部13对有无这些异常进行检测,在检测出异常的情况下,以停止向电动机11的供给电流的方式对逆变器电路12进行控制来实现故障安全功能。然后,在步骤s440中,诊断执行部123将伪的异常信号、例如包括异常电压值、异常电流值的信号输出到控制部13,由此模拟地作出异常状态。通过确定在该异常状态下向电动机11的供给电流是否停止,能够对故障安全功能的正常性进行诊断。另外,用于输出伪的异常信号的电路结构和具体的诊断方法也可以使用公知的结构,例如日本特开2018-26953号公报中所记载的结构等。
58.如图8所示,诊断执行部123对故障安全功能诊断的结果、故障安全功能是否为合格进行判定(步骤s445)。在判定为故障安全功能不是合格的情况下(步骤s445:否),执行上述步骤s455,判断为该eds 10为异常。与此相对,在判定为故障安全功能为合格的情况下(步骤s445:是),判断为该eds 10处于正常(步骤s450)。
59.在上述步骤s450或步骤s455结束后,诊断执行部123针对所有的诊断对象eds 10、即被判定为处于低输出状态的所有的eds 10,对诊断是否结束进行判定(步骤s460)。在判定为针对所有的诊断对象eds 10的诊断未结束的情况下(步骤s460:否),处理返回至上述步骤s405。而且,在这种情况下,以下一顺序的eds 10为对象来执行诊断。另一方面,在判定为针对所有的诊断对象eds 10的诊断结束的情况下(步骤s460:是),如图4所示,处理返回至步骤s105。
60.在飞行控制装置100中将步骤s450、s455的判断结果记录为历史。另外,在本实施方式中,该判断结果被显示在ui部50中。因此,用户能够利用ui部50来确认各eds 10是否处于异常。另外,在判断为处于异常的eds 10中,在能够恢复到正常状态的情况下,也可以自动地进行用于恢复的处理。例如,在图7所示的步骤s410中,在检测值为阈值以上的情况下,也可以自动地执行传感器的偏移(零点)调节。另外,在步骤s435中,在判定为检测值不是正
常值的eds 10中,也可以自动地执行传感器增益的调节。
61.根据以上说明的第一实施方式的异常诊断系统120,由于在判定为电动机11的输出状态为对电动航空器20的移动没有帮助的低输出状态的情况下进行eds 10的异常诊断,因此,能够抑制对电动航空器20的移动动作的影响并进行eds 10的异常诊断。
62.另外,由于以驱动多个电动机11中的被判定为处于低输出状态的电动机11的eds 10为对象进行异常诊断,因此,能够抑制对驱动多个电动机11中的被判定为不是处于低输出状态的电动机11的eds 10带来异常诊断引起的影响,能够进一步抑制对电动航空器20的移动动作的影响。
63.另外,在电动航空器20的驱动力的模式为不实现电动航空器20的垂直方向的升降和水平方向的推进的第三驱动模式的情况下,判定为各电动机11处于低输出状态,因此,能够在该第三驱动模式下进行异常诊断。因此,能够抑制异常诊断对电动航空器20的垂直方向的升降和水平方向的推进造成影响。
64.另外,在电动航空器20的驱动力的模式仅为实现升降的第一驱动模式的情况下,判定为与推进用旋转翼32a~32b对应的电动机11的输出状态为低输出状态,因此,能够以驱动该电动机11的eds 10为对象进行异常诊断,能够抑制该异常诊断对电动航空器20的升降动作造成影响。另外,在电动航空器20的驱动力的模式仅为实现水平方向的推进的第二驱动模式的情况下,判定为与浮起用旋转翼31a~31g对应的电动机11的输出状态为低输出状态,因此,能够以驱动该电动机11的eds 10为对象进行异常诊断,能够抑制该异常诊断对电动航空器20的水平方向的推进动作造成影响。
65.另外,由于诊断执行部123基于各电动机11的再工作预定时期、驱动各电动机11的eds 10为异常时的影响的大小和驱动各电动机11的eds 10的异常诊断的历史,对异常诊断的执行顺序进行决定,因此,能够以要求更早的异常诊断的eds 10为对象,更早地进行异常诊断,能够适当地决定异常诊断的执行顺序。
66.另外,诊断执行部123以与驱动再工作预定时期较晚的电动机11的eds 10相比更早的顺序,对驱动再工作预定时期较早的电动机11的eds 10进行异常诊断,因此,能够抑制异常诊断在再工作时对电动航空器20的移动动作造成影响。
67.另外,由于诊断执行部123以与推进用旋转翼32a~32b对应的eds 10相比更早的顺序对与浮起用旋转翼31a~31g对应的eds 10进行异常诊断,因此,能够抑制异常诊断对电动航空器20的升降动作造成影响。
68.另外,由于以同与距重心位置cm的距离相对较短的位置的浮起用旋转翼对应的eds 10相比更早的顺序,对与距电动航空器20的重心位置cm的距离相对较长的位置的浮起用旋转翼对应的eds 10进行异常诊断,因此,能够以配置于距重心位置cm的距离相对较长的位置且异常诊断对电动航空器20造成的影响更大的eds 10为对象,以更早的顺序进行异常诊断,能够进一步抑制异常诊断对电动航空器20的升降动作造成影响。
69.另外,由于诊断执行部123以使电动机11的输出成为对电动航空器20的移动没有帮助的程度的输出的方式使电动机11通电来对异常诊断的对象eds 10进行异常诊断,因此,能够在异常诊断不会对电动航空器20的移动动作造成影响的同时,执行以向电动机11通电为前提的异常诊断。
70.b.第二实施方式:
第二实施方式的电动航空器20的结构与第一实施方式的电动航空器20的结构相同,因此,对同一构成要素标注同一符号并省略其详细说明。第二实施方式的异常诊断处理在低输出状态判定处理的详细步骤方面与第一实施方式不同,其他步骤与第一实施方式相同。
71.如图9所示,在第二实施方式的低输出状态判定处理中,信息获取部121与第一实施方式不同,获取并确定各eds 10的控制模式(步骤s205a)。例如,信息获取部121通过询问各eds 10来确定控制模式。输出状态判定部122对所确定的控制模式是否为运行模式进行判定(步骤s250)。在判定为是运行模式的情况下(步骤s250:是),输出状态判定部122判定为该电动机11不是处于低输出状态(步骤s255)。与此相对,在判定为不是运行模式的情况下(步骤s250:否),输出状态判定部122判定为该电动机11处于低输出状态(步骤s260)。在第二实施方式中,eds 10的控制模式相当于本公开的电动机输出关联信息。
72.以上说明的第二实施方式的异常诊断系统120具有与第一实施方式的异常诊断系统120相同的效果。除此之外,由于能够以简单的处理进行低输出状态判定处理,因此,能够缩短该处理所需的时间,并且能够减轻处理负荷。
73.c.第三实施方式:第三实施方式的电动航空器20的结构与第一实施方式的电动航空器20的结构相同,因此,对同一构成要素标注同一符号并省略其详细说明。第三实施方式的异常诊断处理在低输出状态判定处理的详细步骤方面与第一实施方式不同,其他步骤与第一实施方式相同。
74.如图10所示,在第三实施方式的低输出状态判定处理中,信息获取部121获取从统合控制部110向各eds 10发送的指示输出值,输出状态判定部122对该指示输出值是否为阈值以下进行判定(步骤s505)。该步骤s505的阈值被设定为驱动电动机11时的指示值的最大值,以使电动机11的输出状态成为低输出状态。作为控制部13用于控制电动机11的指令值,该阈值通过实验等预先确定,以便预先成为低输出状态、即电动机11的输出对电动航空器20的升降或推进等的移动没有帮助的程度的状态。因此,换言之,该步骤s505相当于获取从统合控制部110向各eds 10发送的驱动指令,并对所获取的驱动指令是否为驱动电动机11以使电动机11的输出状态成为低输出状态的指示进行判定的处理。
75.在判定为指示输出值为阈值以下的情况下(步骤s505:是),输出状态判定部122判定为该eds 10处于低输出状态(步骤s530)。与此相对,在判定为指示输出值不是阈值以下的情况下(步骤s505:否),信息获取部121从各eds 10获取相电流值、电动机转速和电动机旋转角度(步骤s510)。输出状态判定部122对所获取的相电流值是否都为阈值电流值以下进行判定(步骤s515)。
76.在判定为所获取的相电流均为阈值电流以下的情况下(步骤s515:是),执行上述步骤s530。另一方面,在判定为所获取的相电流中的至少一个不是阈值电流以下的情况下(步骤s515:否),输出状态判定部122对所获取的电动机转速是否为阈值转速以下进行判定(步骤s520)。
77.在判定为所获取的电动机转速为阈值转速以下的情况下(步骤s520:是),执行上述步骤s530。另一方面,在判定为所获取的电动机转速不是阈值转速以下的情况下(步骤s520:否),输出状态判定部122对所获取的旋转角度是否将规定角度范围保持规定时间以
上进行判定(步骤s525)。在本实施方式中,各电动机11构成为在从运行模式向待机模式或结束模式转变时,以规定的旋转角度停止。这是为了使构成旋转翼30的叶片在规定位置处停止。步骤s525的规定角度范围也可以设定为包括该叶片在规定位置处停止时的电动机11的旋转角度的角度范围。在电动机11的旋转角度为该规定角度范围内保持规定时间以上的情况下,电动机11的旋转停止,电动航空器20处于不移动的状态的可能性较高。在本实施方式中,步骤s525的规定时间被设定为5秒。另外,不限于5秒,也可以设定为任意的时间。
78.在判定为旋转角度将规定角度范围保持规定时间以上的情况下(步骤s525:是),执行上述步骤s530。与此相对,在判定为旋转角度未将规定角度范围保持规定时间以上的情况下(步骤s525:否),输出状态判定部122判定为该eds 10不是处于低输出状态(步骤s535)。在步骤s530或步骤s535结束后,低输出状态判定处理结束。在第三实施方式中,针对各eds 10的指示输出值、电动机电流值、电动机转速和旋转角度分别相当于本公开的电动机输出关联信息。
79.以上说明的第三实施方式的异常诊断系统120具有与第一实施方式的异常诊断系统120相同的效果。除此之外,在从统合控制部110发送的驱动指令是驱动电动机11以使输出状态成为低输出状态的指示的情况下,判定为处于低输出状态,因此,能够高精度地对是否为低输出状态进行判定。
80.d.第四实施方式:第四实施方式的电动航空器20的结构与第一实施方式的电动航空器20的结构相同,因此,对同一构成要素标注同一符号并省略其详细说明。第四实施方式的异常诊断处理在低输出状态判定处理的详细步骤方面与第一实施方式不同,其他步骤与第一实施方式相同。
81.如图11所示,在第四实施方式的低输出状态判定处理中,信息获取部121获取高度传感器41的检测值,输出状态判定部122基于所获取的检测值,对电动航空器20的当前的飞行高度是否为规定的阈值高度以上进行判定(步骤s605)。在判定为飞行高度为规定的阈值高度以上的情况下(步骤s605:是),输出状态判定部122判定为与浮起用旋转翼31a~31g对应的电动机11处于低输出状态(步骤s615)。步骤s615的阈值高度被预先设定为比电动航空器20通常飞行的高度稍低的高度。在电动航空器20达到该阈值高度以上的情况下,不再需要使电动航空器20上升,浮起用旋转翼31a~31g停止的可能性较高。因此,在本实施方式中,在这种情况下,判定为与浮起用旋转翼31a~31g对应的电动机11处于低输出状态。
82.在判定为飞行高度不是规定的阈值高度以上的情况下(步骤s605:否),信息获取部121获取速度传感器43的检测值,输出状态判定部122基于所获取的检测值,对电动航空器20的高度方向(铅垂方向)的速度的大小是否为第一阈值速度(的大小)以下进行判定(步骤s610)。在判定为高度方向的速度的大小为第一阈值速度以下的情况下(步骤s610:是),执行上述步骤s615,判定为与浮起用旋转翼31a~31g对应的电动机11处于低输出状态。步骤s610中的第一阈值速度作为电动航空器20沿铅垂方向上升时的速度,预先通过实验等而确定并设定。在电动航空器20的高度方向(铅垂方向)的速度的大小为第一阈值速度以下的情况下,电动航空器20不再上升的可能性较高。因此,在本实施方式中,在这种情况下,判定为与浮起用旋转翼31a~31g对应的电动机11处于低输出状态。
83.在判定为高度方向的速度的大小不是第一阈值速度以下的情况下(步骤s610:
否),输出状态判定部122基于所获取的速度传感器43的检测值,对电动航空器20的水平方向的速度的大小是否为第二阈值速度(的大小)以下进行判定(步骤s620)。在判定为水平方向的速度的大小为第二阈值速度以下的情况下(步骤s620:是),输出状态判定部122判定为与推进用旋转翼32a、32b对应的电动机11处于低输出状态(步骤s625)。步骤s620中的第二阈值速度作为电动航空器20沿水平方向推进时的最低速度预先通过实验等而确定并设定。在水平方向的速度的大小为第二阈值速度以下的情况下,电动航空器20升降或维持其位置的可能性较高。因此,在本实施方式中,在这种情况下,判定为与推进用旋转翼32a、32b对应的电动机11处于低输出状态。
84.在判定为水平方向的速度的大小不是第二阈值速度以下的情况下(步骤s620:否),输出状态判断部122判定为所有的电动机11不是处于低输出状态(步骤s630)。在步骤s615、步骤s625或步骤s630结束后,低输出状态判定处理结束。在第四实施方式中,电动航空器20的飞行高度、高度方向的电动航空器20的速度和电动航空器20的水平方向的速度分别相当于本发明的电动机输出关联信息。
85.以上说明的第四实施方式的异常诊断系统120具有与第一实施方式的异常诊断系统120相同的效果。除此之外,在电动航空器20的飞行高度为阈值高度以上的情况下以及高度方向的速度的大小为第一阈值速度以下的情况下,判定为与浮起用旋转翼31a~31g对应的电动机11处于低输出状态,能够高精度地执行与浮起用旋转翼31a~31g对应的电动机11是否为低输出状态的判定。另外,在判定为水平方向的速度的大小为第二阈值速度以下的情况下,判定为与推进用旋转翼32a、32b对应的电动机11处于低输出状态,因此,能够高精度地执行与推进用旋转翼32a、32b对应的电动机11是否为低输出状态的判定。
86.e.其他实施方式:(e1)在各实施方式中,将具有多个电动机11中的被判定为处于低输出状态的电动机11的eds 10作为诊断对象eds,但是本公开不限定于此。也可以是,即使在判定为多个电动机11中的一个处于低输出状态的情况下,也将所有的eds 10作为诊断对象eds来执行诊断处理(步骤s125)。通过这样的结构,能够缩短异常诊断所需的合计时间。
87.(e2)在各实施方式中,在存在多个诊断对象eds 10的情况下,按照由诊断顺序确定处理确定的步骤,一个一个地执行诊断处理,但是本公开不限定于此。也可以同时对所有的诊断对象eds 10进行诊断。在该结构中,也可以在步骤s120的诊断条件下,在全部的九个eds 10中进行诊断用通电的前提下,确定电源70的soc的条件。
88.(e3)在各实施方式的诊断顺序确定处理中,从下述(i)~(iv)的合计四个观点出发来设定用于决定诊断顺序的优先级,但是也可以省略其中的一部分。(i)再工作预定时期(ii)是否为与浮起用旋转翼31a~31g对应的eds 10(iii)距重心位置cm的距离(iv)准异常的诊断结果的次数例如,也可以仅以再工作预定时期来设定诊断顺序的优先级。另外,在各实施方式中,将由上述四个观点赋予的优先级相加并求出合计值,基于该合计值来决定诊断顺序,但是代替相加,也可以基于将各优先值相乘而得到的值来决定诊断顺序。另外,也可以对各观点中的优先值中的最大的优先值、优先值的平均值彼此进行比较并以较大的顺序来设定诊
断顺序。另外,也可以在对上述四个观点进行加权的基础上进行相加来求出合计值(优先值)。
89.另外,在上述(i)~(iv)的合计四个观点中,(ii)、(iii)简而言之是“对该eds 10异常时的影响较大的eds 10赋予更大的优先级”的观点,(iv)简而言之是“对基于异常诊断的历史成为异常的可能性较高的eds 10赋予更大的优先级”的观点。因此,如果包含在这些观点中,则不限于上述(i)~(iv)的观点,也可以以其他任意的观点来设定优先级。
90.另外,代替上述(i)~(iv)的合计四个观点中的一部分观点、或者除了这些观点之外,也可以以其他的观点来设定优先级。例如,在各eds 10具有冗余性的结构中,在冗余的一部分eds 10为异常或疑似异常的情况下,也可以对构成该冗余的正常eds 10赋予比冗余的所有eds 10为正常的eds 10高的优先级(优先值)。
91.(e4)在各实施方式的诊断处理中,也可以省略基于诊断用通电前的传感器检测值的诊断(步骤s410)、控制部13的资源的检查(步骤s415、s420)、基于诊断用通电执行中的传感器检测值的诊断(步骤s435)、故障安全功能诊断(步骤s440)中的一部分。
92.(e5)在各实施方式中,诊断条件为“电源70的蓄电量为规定值以上”,但是本公开不限定于此。代替上述条件、或者除了上述条件之外,也可以是下述(a)、(b)那样的条件。(a)“电动航空器20不是处于起降状态”(b)“电动航空器20的姿势、舵角表示不是处于回旋中”在不满足上述(a)、(b)的条件的状况、即电动航空器20处于起降状态的状况和电动航空器20处于回旋中的状况下,在发生了诊断的误动作的情况下,对电动航空器20的飞行的影响表现得相对较大的可能性较高。因此,也可以将不是这样的状况的条件设定为诊断条件。
93.(e6)在各实施方式的诊断处理中,作为诊断用通电,控制部13向电动机11供给通电的结果为能够抑制对电动机11的转矩造成影响的程度的规定大小的电流,但是也可以向电动机11供给对电动机11的转矩造成影响的程度的大小的电流。在该结构中,在与浮起用旋转翼31a~31g中的多个旋转翼30对应的eds 10为诊断对象eds的情况下,使一部分旋转翼30正转,使剩余的旋转翼30反转,从而也可以将合计升力设为零来抑制对电动航空器20的移动的影响。另外,在与彼此对称位置的旋转翼30对应的eds 10为诊断对象的情况下,这些eds 10也可以使电动机11沿彼此相反的方向旋转。在该结构中,也能够抑制对电动航空器20的移动的影响。另外,在电动航空器20处于回旋中的情况下,也可以根据该回旋方向来控制电动机11的旋转方向。例如,也可以在电动航空器20向左方向回旋的过程中使电动机11朝左旋转,在电动航空器20向右方向回旋的过程中使电动机11朝右旋转。在该结构中,也能够抑制对电动航空器20的回旋动作造成影响。
94.(e7)在第四实施方式中,为了对是否处于低输出状态进行判定,使用高度方向的速度和水平方向的速度,但是本公开不限定于此。也可以使用高度方向(铅垂方向)的加速度和水平方向的加速度。例如,也可以在高度方向的加速度为规定的大小以下的情况下或仅减少了规定的大小的情况下,判定为与浮起用旋转翼31a~31g对应的电动机11处于低输出状态。例如,也可以在水平方向的加速度为规定的大小以上的情况下或仅增加了规定的大小的情况下,判定为与浮起用旋转翼31a~31g对应的电动机11处于低输出状态。
95.(e8)在第一实施方式中,电动航空器20是具有固定翼(主翼25)的航空器,但是也
可以是具有倾斜型的翼且在该翼上设置有旋转翼30的类型的航空器。在该结构中,例如,在第一实施方式的右翼26和左翼27为任一倾斜型的情况下,在图1的状态下,旋转翼31f、31g起到浮起用的旋转翼的作用,旋转翼32a、32b起到推进用的旋转翼的作用。与此相对,从图1的状态开始,右翼26和左翼27旋转90度的情况下,旋转翼31f、31g起到推进用的旋转翼的作用,旋转翼32a、32b起到浮起用的旋转翼的作用。在这样的结构中,也可以基于右翼26和左翼27的倾斜角度,对各旋转翼对水平方向的移动和铅垂方向的移动中的哪一个有帮助进行判断,并与动作模式组合来判定低输出状态。具体而言,在不是第一驱动模式的情况下、即在仅为第二驱动模式或第三驱动模式的情况下,能够判定为与对铅垂方向的移动有帮助的旋转翼对应的电动机11处于低输出状态。另外,在不是第二驱动模式的情况下、即在仅为第一驱动模式或第三驱动模式的情况下,能够判定为与对水平方向的移动有帮助的旋转翼对应的电动机11处于低输出状态。以上说明的结构也能够同样适用于具有倾斜型旋翼(日文:
ティルタロータ
)的航空器。
96.(e9)电动机输出关联信息在第一实施方式中是电动航空器20的驱动力的模式,在第二实施方式中是eds 10的控制模式,在第三实施方式中是针对各eds 10的指示输出值、电动机电流值、电动机转速和旋转角度,在第四实施方式中是电动航空器20的飞行高度、高度方向的电动航空器20的速度和电动航空器20的水平方向的速度,但是本公开不限定于此。例如,也可以将姿势传感器44的检测结果用作电动机输出关联信息。具体而言,也可以在姿势传感器44的检测结果偏离目标的姿势范围的情况下,例如,在偏离机身轴线ax与地面所成的角度的目标角度范围的情况下,判定为所有的电动机11处于低输出状态。在电动航空器20的姿势偏离目标范围的情况下,由于产生了某种异常,因此,eds 10的控制模式成为异常模式,存在限制电动机11的输出的可能性。或者,由于电动机11的输出较低,因此,存在姿势不稳定而偏离目标范围的可能性。
97.(e10)各实施方式中的异常诊断系统120、eds 10、飞行控制装置100等的结构仅为一例,能够进行各种变更。例如,异常诊断系统120不限于电动航空器20,也可以装设于汽车、火车等电动车辆、船舶等任意的移动体。另外,eds 10也可以构成为不包括电动机11。统合控制部110也可以不装设于电动航空器20,而是由例如设置于地面的指挥塔等的服务器装置构成。在该结构中,也可以通过经由通信装置60的通信来控制各eds 10、异常诊断系统120。另外,例如,在各实施方式中,作为电动航空器20的驱动力的模式,预先准备了第一驱动模式至第三驱动模式,但是也可以不预先准备第三驱动模式。例如,在作为电动航空器20的驱动力的模式,允许“什么都不设定”的结构中,在第一实施方式的低输出状态判定处理的步骤s210中,代替对“所确定的模式是否为第三驱动模式”进行判定,也可以对“所确定的模式是否不包括第一驱动模式和第二驱动模式中的任一个”进行判定。然后,也可以构成为,在判定为“所确定的模式不包括第一驱动模式和第二驱动模式中的任一个”的情况下,执行上述步骤s215,在判定为“所确定的模式包括第一驱动模式和第二驱动模式中的任一个”的情况下,执行上述步骤s220以后的步骤。
98.(e11)本公开所记载的统合控制部110、异常诊断系统120及它们的方法也可以通过利用构成处理器和存储器而提供的专用计算机来实现,上述处理器被编程为执行由计算机程序具体化的一个至多个功能。或是,本公开所记载的统合控制部110、异常诊断系统120及它们的方法也可以通过利用由一个以上的专用硬件逻辑电路构成处理器而提供的专用
计算机来实现。或者,本公开所记载的统合控制部110、异常诊断系统120及它们的方法也可以通过利用被编程为执行一个至多个功能的处理器及存储器与由一个以上硬件逻辑电路构成的处理器的组合构成的一个以上的专用计算机来实现。此外,计算机程序也可以被存储于计算机可读的非暂时性有形存储介质,以作为由计算机执行的指令。
99.本公开不限于上述实施方式,能在不超出上述主旨的范围内通过各种结构实现。例如,与发明内容部分所记载的形态中的技术特征对应的各实施方式中的技术特征可以适当地进行替换或组合,以解决上述技术问题的一部分或全部、或者实现上述效果的一部分或全部。此外,上述技术特征只要未在本说明书中作为必须结构而说明,就可适当删除。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1