无触点供电及数据通信装置和利用其的旋转驱动激光雷达系统的制作方法
1.本发明涉及无触点供电及数据通信装置,更详细地说,提供一种采用无触点方式向旋转部供给固定部的电力并在旋转部与固定部之间基于光通信收发数据的机械装置,并提供能够应用于获取三维图像的激光雷达系统的无触点电源供给及数据通信装置和利用其的旋转驱动激光雷达系统。
背景技术:
2.一般而言,马达或电动机的电力供给系统等采用具有有触点电路的电力传送装置。有触点电力传送装置的优点是比较简单且价格低廉,但采用有线连接,因此不易应用到包括旋转结构或旋转驱动单元的机械装置。
3.为了解决上述问题,其他现有技术常用一种被称为旋转接头、旋转连接器等的电子电气/机械部件即滑环(slip ring)。滑环(slip ring)是向旋转的物体供给电源或电信号的装置,被施加电源而运转的装置被设置到旋转物体的内部时,会解决将其连接的电线出现扭曲而无法进行旋转动作的问题,是一种不会出现电线扭曲地传送电力的旋转型连接器。
4.但是,滑环等无触点电力传送装置较多地仅用于供给电源,以石墨类型的低价格滑环为主。但是,石墨类型的滑环的缺点是出现不良及不易维修且出现微信号种类增加的问题,具有复杂的结构且费用高,需要较高的技术要求。
5.据此,韩国授权专利公报第10-1671352号(2016.10.26.)公开了一种具有光信号传送手段的三轴滑环。该现有技术公开一种由传送压力的压力传送部、传送电力的电力传送部、传送光信号的光信号传送部构成为一体的三轴无触点滑环马达,用一个滑环供给压力和电力及光信号。
6.但是,所述现有技术的无触点滑环马达的结构复杂,包括转子部、电路基板部、连接器部及滑环组,不是提供无线光通信而是通过贯通孔内的光缆传送光信号。因此,所述现有技术需要具备用于传送光信号的贯通孔,因此存在不容易制造,难以确保耐久性、可靠性及再现性的问题。
技术实现要素:
7.(要解决的技术问题)
8.为了解决所述现有技术所存在的问题,本发明提供一种无触点供电及数据通信装置,以作为主轴的固定的轴为中心结合旋转部而构成,消除旋转单元装置的颤动,提供通过无触点动力传送方式(non contact power supply)稳定地供给电源的电磁感应手段及光基础数据通信环境。
9.并且,本发明的目的在于,在被安装到旋转的基板和固定的基板的光通信模块的收发中,在旋转基板和固定基板之间设置光扩散板,从而可以与收发元件的位置无关地进
行相互通信。
10.并且,本发明的另一目的在于,提供一种旋转驱动激光雷达系统,利用无触点供电及数据通信装置向被安装到旋转部的激光收发模块以无触点动力传送方式供给电力而使其运转,通过光通信模块收发信号或数据。
11.(解决问题的手段)
12.用于解决所述技术问题的本发明一方面的无触点供电及数据通信装置的特征在于,包括:主体外壳,由上部结合体和下部结合体构成;主轴,被所述下部结合体支撑且从中心连接并固定上部结合体;马达,提供旋转动力而使旋转部以所述主轴为中心旋转;无线电力部,与所述主轴的外周面结合固定的发送部核心和在与所述发送部核心隔开的上端进行旋转的接收部核心构成,基于电磁感应供给和接收电力;及光通信部,设置在以所述主轴为中心旋转的旋转基板的下面的旋转通信元件和设置在被固定的固定基板的上面的固定通信元件以一定距离隔开而收发光信号。
13.并且,本发明的所述主轴为了将从控制基板引入的信号及电力连接线连接到内部,中心部被贯通而形成具有一定半径的通道的贯通孔。
14.并且,本发明的所述马达为外转子(outer rotor)型无刷直流(brushless direct current,bldc)马达,以主轴为中心设置作为定子(stator)的马达固定部,在所述马达固定部的外侧设置由转子(rotor)形成的马达旋转部。
15.并且,本发明的所述无线电力部的发送部核心和接收部核心是彼此对称的结构,里面的空间包括缠绕一定量的线圈的线圈形态的接收部线圈及发送部线圈,所述发送部线圈连接到通过主轴的贯通孔引入的电力连接线。
16.并且,本发明的所述无线电力部的接收部核心及所述光通信部的旋转基板可以与传送马达旋转部的旋转力的旋转支撑件结合。
17.并且,本发明的所述旋转支撑件与沿着主轴的外周面设置在至少一处的轴承相接触而旋转。
18.并且,本发明的所述光通信部还可以在圆形的固定基板与旋转基板之间具有圆形的光扩散板,由光扩散部件形成而通过散射及扩散作用均匀地传播用于收发的光源的光。
19.并且,本发明的所述旋转通信元件包括由可见光二极管(led)构成的多个可见光发送模块及由红外线接收传感器构成的一个ir接收模块,所述固定通信元件包括由红外线激光二极管(ld)构成的至少一个以上的ir发送模块及由可见光接收传感器构成的一个可见光接收模块。
20.并且,本发明的光扩散板还可以包括传送所述旋转通信元件与所述固定通信元件之间的光信号的光波导。
21.用于解决所述技术问题的本发明的另一方面的具有无触点供电及数据通信装置的旋转驱动激光雷达系统包括:主体外壳,由上部结合体和下部结合体构成;主轴,被所述下部结合体支撑且从中心连接并固定上部结合体;马达,提供旋转动力而使旋转部以所述主轴为中心旋转;无线电力部,由与所述主轴的外周面结合固定的发送部核心和在与所述发送部核心隔开的上端进行旋转的接收部核心构成,基于电磁感应供给和接收电力;光通信部,以所述主轴为中心,设置在上部的旋转的旋转基板上的旋转通信元件和被固定到下部的固定基板上的固定通信元件以一定距离隔开而收发光信号;以及激光收发模块,由以
所述主轴为中心接收马达的旋转动力而旋转并发送激光的激光发送单元和用于接收被目标物反射而返回的激光的激光接收单元构成;所述激光收发模块通过电路连接到所述无线电力部的接收部线圈而接收由所述接收部线圈感应的电力而执行激光收发操作,通过所述光通信部收发信号或数据而掌握事物的距离及形状。
22.(发明的效果)
23.前述无触点供电及数据通信装置不仅通过简单的结构,从固定部向旋转的旋转部供给电力而使其运转,而且通过光通信模块收发固定部与旋转部之间的信号或数据,可以应用于多种应用装置或系统。
24.并且,本发明以作为主轴的固定的轴为中心结合旋转部而构成,可以消除旋转单元装置的颤动。
25.并且,本发明对于光通信模块的收发,在旋转基板与固定基板之间设置光扩散板而与收发元件的位置无关地进行相互通信并提高了通信效率。
26.并且,本发明的光通信部不仅通过红外线进行双向通信,还可以有选择或综合地应用于红外线(ir)或可见光(visible)波长领域,可以预防因不同波长带引起的通信混乱,执行有效的双向光通信。
附图说明
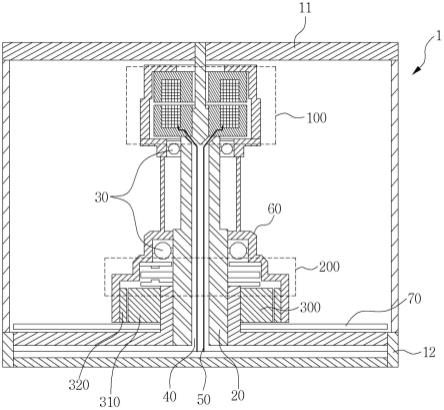
27.图1是本发明一个实施例的无触点供电及数据通信装置的概略性正视图。
28.图2是扩大示出图1的无触点供电及数据通信装置的无线电力部的示例图。
29.图3是扩大示出图1的无触点供电及数据通信装置的光通信部的示例图。
30.图4是本发明一个实施例的图3的光通信部中对应可见光发送模块的可见光接收模块的示例图。
31.图5是本发明一个实施例的图3的光通信部中对应ir发送模块的ir接收模块的示例图。
32.图6是本发明一个实施例的采用无触点供电及数据通信装置的旋转驱动激光雷达系统的主要构件的正视图。
33.图7是按图6构成的旋转驱动激光雷达系统的结合结构的示例图。
34.图8是按图6结合的旋转驱动激光雷达系统的内部示例图。
35.图9是示出本发明图8的运转状态的外观立体图。
具体实施方式
36.对本说明书及权利要求书中使用的术语或词语的解释不应仅限于常规或词典上的意思,应本着发明人能够适当地定义术语的概念以用最佳方式描述其发明的原则,将其解释为符合本发明技术思想的含义和概念。
37.因此,应该理解的是,由于本说明书中所描述的实施例和附图中所示的结构只是本发明的一个最佳实施例而已,并非代表本发明的所有技术思想,因此在本技术时点,可能存在可以替代它们的各种均等物和变形例。
38.以下参照附图详细描述本发明的优选实施例。
39.图1是本发明一个实施例的无触点供电及数据通信装置的概略性正视图,图2是扩
大示出图1的无触点供电及数据通信装置的无线电力部的示例图,图3是扩大示出图1的无触点供电及数据通信装置的光通信部的示例图。
40.如图1至图3所示,本发明的无触点供电及数据通信装置1被区分为:旋转部,在外壳的内部基于驱动马达旋转而运转;及固定部,向所述旋转部供给电力并为了控制它而被固定及运转。并且,还包括分别与所述旋转部和固定部结合的电子装置及机械器具部。
41.因此,本说明书中的旋转部对应旋转体或旋转单元,固定部对应固定体或固定单元等术语。
42.所述固定部被在中心纵向连接外壳10主体的上部结合体11和下部结合体12的主轴(main-shaf)20支撑而连接。其中,所述上部结合体11和下部结合体12对应无触点供电及数据通信装置1的上端盖和下端盖。
43.即,所述主轴20是被安装到下部结合体12的中心部并被支撑且连接到上部结合体11的中心的固定轴,可以称为为了支撑马达300的外周旋转而延长马达300的中心轴的结构。
44.并且,所述主轴20的中心部被贯通而形成具有一定半径的中空的贯通孔40,从而将从控制基板70引入的信号及电力连接线50连接到内部。即,所述贯通孔40可以称为引入用于供给由下部结合体12的控制基板70供给的电力的电力连接线50和用于通过光通信部200进行数据收发的信号线50的内部通道。
45.因此,根据本发明的无触点供电及数据通信装置,提供旋转动力而使得以主轴20为中心轴的旋转部旋转的马达300被设置在控制基板70上方,基于所述马达300的旋转动力而旋转的旋转部通过位于主轴20外周面的轴承30旋转,用于收发光信号的光通信部200位于驱动马达300的上侧,以主轴20为轴,最上侧设置有接受电力连接线50的电力供给并向旋转部供给电源的无线电力部100。
46.本发明的所述控制基板70结合到位于无触点供电及数据通信装置的下端的下部结合体12而被供给外部电力,生成用于控制马达300的旋转速度或控制旋转部的电子装置的控制信号,并且具有通过光通信部200接收由旋转部生成的数据并进行处理的数据处理手段。
47.即,所述控制基板70可以包括选自逻辑电路、程序设计逻辑控制器、微计算机、微处理器等的至少一个装置,并且装有可以通过内部网、网络、车辆网络等与外部装置进行通信而传送信号或数据的通信模块。
48.因此,所述控制基板70可以具有被施加外部电力的电源连接器和用于连接到外部网络的通信连接器,根据实施例,还可以有选择或追加具备电源和通信兼容的综合连接器。
49.本发明的所述驱动马达300是由定子(stator)以主轴20为中心形成在外廓的马达固定部310和产生旋转力的部分即转子(rotor)形成在马达固定部310的外侧的马达旋转部320构成的外转子(outer rotor)型无刷直流(brushless direct current,bldc)马达。即,本发明应用外转子型马达的结构,呈现旋转部基于马达外周面的旋转力而旋转的装置。
50.并且,由所述旋转部构成的光通信部200的旋转基板210、用于无线电力部100接收电力的接收部核心110及为了特定目的的功能而安装的旋转单元可以与用于接收旋转力的旋转支撑件60结合。因此,所述旋转支撑件60可以具有与马达旋转部320结合而将马达的旋转力传送到旋转部的组成单元的结构。
51.并且,为了减少基于旋转的摩擦及能量损耗或发热而顺畅地旋转,所述旋转支撑件60与沿着主轴20的外周面设置在至少一处的轴承30接触并旋转。
52.所述无线电力部100如图2所示,包括与主轴20的外周面结合的发送部核心120以及在与所述发送部核心120隔开的上端,与旋转支撑件60结合而在主轴20的外周面旋转并从所述发送部核心130接收无触点方式的电力,将电力供给到激光收发模块等旋转单元的接收部核心110。
53.所述接收部核心110及发送部核心120是彼此对称的结构,里面的空间包括缠绕一定量线圈的线圈形态的接收部线圈(coil)111及发送部线圈121。
54.即,接收部核心110及发送部核心120是用于支撑被插入到内侧空间的所述接收部线圈111及发送部线圈121的线圈架,可以被称为因磁导率高且导电性低的特性而被用作变压器或感应器的核心等的强磁性元件的铁素体核心,以一定距离彼此隔开设置的所述发送部线圈121及接收部线圈111可以被称为以一定的线圈直径及一定的转数缠绕的发送线圈及接收线圈。
55.其中,所述发送部线圈121连接到通过贯通孔40引入的电力连接线50而起到以固定的状态接收控制基板70传送的电力并形成电磁场的功能。据此,基于发送部线圈121的电磁场的电磁感应生成的感应电动势通过无触点电力传送方式(non contact power supply)传递到旋转的所述接收部线圈111。
56.向连接到用于向所述接收部线圈111传送电力的电源输入端子的旋转单元供给感应电力。据此,由旋转部驱动的旋转单元基于接收部线圈111接收通过电磁感应供给的电力并运转。
57.因此,本发明中,通过连接所述旋转部与发送并接收激光的激光收发模块400等特定驱动单元,可以通过无触点供给的电力实现运转。
58.一般而言,根据被缠绕到发送部线圈121及接收部线圈111的线圈量的扩大和接收部核心110及发送部核心120的隔开距离来确定电磁感应量及无线传送能源量,通过增加线圈量或减少隔开距离来提高电力传送率和收率。
59.图3是光通信部200的结构示例图,图3的(a)示出光通信部200与向马达旋转部320的外周面延长的旋转支撑件60结合的状态,图3的(b)是与主轴20结合的光通信部的立体图。
60.因此,本发明的光通信部200如图所示,以一定距离隔开的下部的固定基板230及上部的旋转基板210作为一双彼此对应。
61.所述光通信部200具有位于所述旋转基板210的下面而向下部方向通信的旋转通信元件211和设置在所述固定基板230的上面而向上部方向通信的固定通信元件231。并且,在所述固定基板230与旋转基板210之间还具有光扩散板220,以通过光的扩散提高通信效率。
62.所述旋转基板210是通过旋转支撑件60结合并旋转的圆形的电路基板(printed circuit board,pcb),其中,设置于旋转基板210下面的旋转通信元件211包括由可见光二极管(led)构成的多个可见光发送模块212及由红外线接收传感器(ir传感器)构成的一个ir接收模块213,从而传送由激光收发模块等旋转单元产生的大量数据信号。
63.并且,所述固定基板230可以是通过螺栓和螺母或其他紧固手段结合到马达固定
部310的上侧而与所述旋转基板210相对应地沿着主轴20的周围被固定的电路基板。其中,位于固定基板230上面的固定通信元件231可以包括由红外线激光二极管ld构成的至少一个以上的ir发送模块232及由接收固定基板230发送的控制信号的可见光接收传感器构成的一个可见光接收模块233。
64.优选地,所述可见光发送模块212及ir发送模块232为至少三个以上。
65.因此,图4是本发明一个实施例的图3的光通信部200中对应三个可见光发送模块212的固定基板230的可见光接收模块233的示例图,图5是图3的光通信部200中对应设置在固定基板230的三个ir发送模块232的旋转基板210的ir接收模块213的示例图。
66.即,如图4及图5所示,作为旋转通信元件211的可见光发送模块212及作为固定通信元件231的ir发送模块232在所述旋转基板210和固定基板230上,以形成120度角的相同间隔,设置三个。
67.因此,本发明的光通信部200为了有效传送旋转单元产生的大量数据信号,旋转基板210的可见光发送模块212三个将同时运转,同时传送大量数据,使得固定基板230的可见光接收模块233能够接收,相反,以控制基板70用于控制旋转单元的指令为主的控制信号被三个ir发送模块232传送而由旋转基板210的ir接收模块213接收。
68.并且,所述光扩散板220是被固定在固定基板230与旋转基板210之间,当上侧的旋转基板210旋转时,两侧的光收发元件的位置将不一致,导致无法实现光收发或效率有所降低,为了解决这种问题,提供通过散射及扩散作用均匀地传播点光源或线光源的光的功能。因此,所述光扩散板220可以采用可通过光衍射或扩散而转换为没有热点的面光源的薄膜形态或薄板形态的光扩散部件。
69.除此之外,所述光扩散板220还可以包括光波导221。当光扩散板220包括光波导221时,所述旋转通信元件211与所述固定通信元件231之间的光信号传送将变得更加容易。
70.图6是本发明一个实施例的采用无触点供电及数据通信装置的旋转驱动激光雷达系统的主要构件的正视图,图7是按图6构成的旋转驱动激光雷达系统的结合结构的示例图,图8是按图6结合的旋转驱动激光雷达系统的内部示例图,图9是示出本发明图8的运转状态的外观立体图。
71.如图6所示,本发明中,可以结合前述的无触点供电及数据通信装置1的旋转部与至少一个以上的激光收发模块400而构成旋转驱动的激光雷达系统(lidar:light detection and ranging)2。
72.如图所示,采用本发明的无触点供电及数据通信装置1的旋转驱动激光雷达系统2构成为具有上部结合体11和下部结合体12上下结合的圆筒形状的主体外壳的形态。所述上部结合体11和下部结合体12可以起到激光雷达系统2的上/下部壳体的作用。
73.并且,旋转驱动激光雷达系统2被由透光性材质形成的激光透射窗(window)功能的外侧壳体430保护,从而基于旋转的激光收发模块(laser module)400的激光被传送到外部,被外部物体等反射而返回的激光的接收变得容易。
74.并且,所述上部结合体11还可以具有散热片(heat sink)形状的散热板,其具有热传导率优异的散热结构而易于将激光雷达系统2的内侧产生的热量释放到外部。
75.因此,所述激光收发模块400位于光通信部200的旋转基板210上,以主轴20为中心轴而结合。
76.据此,所述激光收发模块400通过电路连接到无线电力部100的接收部线圈111,通过所述接收部线圈111感应的电力实现激光收发操作,根据马达300的旋转速度的控制,其旋转速度受到控制。
77.因此,本实施例的激光收发模块400按照旋转操作,可以由发送激光的激光发送单元和用于接收被目标物反射而返回的激光的激光接收单元构成。附图中,本发明的激光收发模块400包括设置在中心的由激光发射透镜410呈现的激光发送单元及由一双激光接收透镜420构成的激光发送单元,但激光收发模块可以具有多种具体结构。
78.并且,利用本实施例的无触点供电及数据通信装置的激光雷达系统2通过位于旋转基板210的下面的旋转通信元件211和位于固定基板230的上面的固定通信元件231,可以无障碍地双向收发光信号,可以通过控制基板70的控制手段对由固定通信元件231接收的激光收发模块400的影像信号及数据进行信号处理。这表示基于控制基板的信号处理,对由所述激光收发模块发射的激光被目标物反射后被接收的光信号掌握事物的距离及形状。
79.并且,本实施例的旋转驱动激光雷达系统2通过基于无线电力部100的无触点方式向结合到旋转部的激光收发模块400供给电力,所述激光收发模块400旋转且执行有效的操作。
80.如上所述,本发明一个实施例的旋转驱动激光雷达系统2可以说是使得基于马达旋转的激光收发模块进行360度的旋转且收发激光的激光雷达光学装置结合前述的无触点供电及数据通信装置1而形成的系统。
81.并且,通过上述激光雷达系统的实施例,可以确认本发明的无触点供电及数据通信装置1可应用于激光距离测量仪或激光雷达(lidar)装置,并且可应用于结合到旋转部的旋转驱动单元运转的多种系统,除此之外,还可以有效地变形应用于各种结构的装置、应用装置或系统。即,也可以在机器人、船舶、直升机、无人机等中应用本发明的无触点供电及数据通信装置的无触点供电及数据通信功能,同时,可以不受限制地应用于建筑物、柱子、塔等移动被限制的固定装置。
82.如前所述,虽然本发明说明书中描述了优选实施例,但本发明技术领域的普通技术人员能够理解到在不脱离权利要求书中记载的本发明的思想及领域的范围内,对本发明实施多种修改及变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1