用于运行电机的方法、用于运行电机的装置、电驱动系统与流程
本发明涉及一种用于运行电机、尤其是机动车的电机的方法,其中所述电机具有可旋转地支承的转子和电机绕组,其中所述电机绕组通过功率电子器件与电储能器电连接,并且其中通过操控所述功率电子器件对所述电机如此进行场定向的调节,使得电机产生预先给定的目标扭矩。本发明还涉及一种用于运行电机的装置,其具有控制器。本发明还涉及一种电驱动系统。
背景技术:
1、电机通常具有可旋转地支承的转子和电机绕组。在此,转子能够通过给电机绕组适当地通电来驱动或者旋转。例如,电机绕组是相对于壳体固定的定子绕组,所述电子绕组以围绕转子分布的方式布置。为了实现以期望的方式给电机绕组通电,所述电机绕组通常通过功率电子器件与电储能器电连接。电机绕组的通电于是通过操控所述功率电子器件的开关元件来进行调节或者控制。
2、由现有技术已知,通过操控功率电子器件对电机如此进行场定向的调节,使得电机产生预先给定的目标扭矩。也就是说,预先给定应该通过电机产生的目标扭矩,并且所述电机借助于场定向的调节来运行。在场定向的调节的范围内,通常根据电机绕组的正弦形的、实际相电流借助于d/q变换来求取实际电流矢量。所述实际电流矢量将实际相电流描述为相对于转子固定的坐标系中的常量产生扭矩的电流iq构成实际电流矢量的第一方向分量。产生通量的电流id构成实际电流矢量的第二方向分量。此外,根据目标扭矩来求取目标电流矢量,并且以受控方式如此操控功率电子器件,使得目标电流矢量(一方面)与实际电流矢量(另一方面)之间的差减小或者最小化。
技术实现思路
1、具有权利要求1的特征的根据本发明的方法的特征在于:在识别到基于电机的当前实际工作点应该至少基本上时间优化地设定电机的预先给定的目标工作点时,预先给定预测的前馈控制;以及根据预测的前馈控制通过操控所述功率电子器件来设定目标工作点。也就是说,如果识别到应该以时间优化的方式、即尽可能快地设定目标工作点,则根据预测的前馈控制来操控功率电子器件。由此,与场定向的调节相比,能够更快地设定目标工作点。在识别到应该时间优化地设定预先给定的目标工作点时,优选暂停所述场定向的调节。优选地,预测具有用于功率电子器件的开关元件的多个操控信号的控制序列作为前馈控制。作为替代方案,优选预测具有多个目标电压矢量的控制序列作为前馈控制。然后,根据所述目标电压矢量求取用于开关元件的操控信号。优选地,预先给定电机的目标电流工作点作为目标工作点。电机的每个电流工作点与相应不同的电流矢量相对应。
2、根据一种优选的实施方式设置,在电机的运行中根据当前的实际工作点来预测前馈控制。也就是说,根据当前的实际工作点“在线”预测前馈控制。由此得到下述优点,即能够为任意的当前的实际工作点预测合适的前馈控制。相应地,能够基于任意的当前的实际工作点以时间优化的方式设定预先给定的目标工作点。优选地,在电机的运行中预测的前馈控制在预先给定的持续时间内、即暂时地被缓存,使得预测的前馈控制在预先给定的持续时间内供使用并且能够被预先给定。
3、优选地,前馈控制在预试验中进行预测并且存储在配属于电机的数据存储器中。也就是说,例如在工厂中应用电机时“离线”预测前馈控制。因此,不必在电机的运行中预测前馈控制。由此,得到的优点一方面在于,在被构造用来求取用于功率电子器件的操控信号的控制器中,不必预留用于预测前馈控制的计算能力。此外得到的优点在于,与电机的运行中的预测相比,前馈控制更快地供使用。
4、根据一种优选的实施方式设置了,为多个潜在的目标工作点分别预测前馈控制。由此得到的优点是,在需要时能够特别迅速地设定不同的目标工作点。如果在电机的运行中预测了前馈控制,则优选将潜在的目标工作点优先化。然后根据优先级依次为潜在的目标工作点分别预测前馈控制。优选地,为多个潜在的实际工作点分别预测前馈控制。即预先给定多个潜在的实际工作点并且为这些实际工作点分别预测前馈控制。当前馈控制在预试验中进行预测时,这是特别有利的。例如,预先给定相应地位于电机的mtpa特性曲线(maximum torque per ampere每安培最大扭矩)上的多个潜在的实际工作点,并且为这些实际工作点分别预测前馈控制。如果为多个实际工作点和/或多个目标工作点分别预测前馈控制,则将前馈控制优选存储在特性曲线中。
5、根据一种优选实施方式设置了,将传感器的传感器信号与预先给定的临界值进行比较,并且根据比较识别出,是否应该至少基本上时间优化地设定目标工作点。例如,当传感器信号超过临界值或当传感器信号低于临界值时,应该至少基本上以时间优化的方式设定目标工作点。该比较优选以传感器的传感器信号为基础,所述传感器构造用于监测电机的周围环境或者监测具有所述电机的装置的周围环境。作为替代方案或补充方案,该比较优选以传感器的传感器信号为基础,所述传感器构造用于监测配属于电机的操作装置的操纵。
6、根据一种优选的实施方式设置了,预先给定工作点作为目标工作点,在该工作点中,电机产生发电机式的减速力矩,其中在检测到紧急制动情况时识别出,应该至少基本上以时间优化的方式设定目标工作点。由此得到的优点是,发电机式的减速力矩通过电机特别快速地产生,从而最终缩短了具有该电机的机动车的制动距离。优选地,紧急制动情况根据机动车的环境传感器系统的环境传感器的传感器信号来检测。作为替代方案,紧急制动情况根据机动车的制动踏板的操纵来检测。例如,当通过配属于制动踏板的传感器检测到该制动踏板的操纵速度超过预先给定的阈值时,识别出存在紧急制动情况。在此,优选预先给定工作点作为目标工作点,在所述工作点中,电机产生最大的发电机式的减速力矩。作为替代方案,预先给定工作点,在所述工作点中,电机产生较小的发电机式的减速力矩,例如为最大的发电机式的减速力矩的80%的减速力矩。
7、根据一种优选的实施方式设置了,预先给定工作点作为目标工作点,在所述工作点中,电机产生加速力矩,其中在检测到最大动态规定时识别出应该至少基本上以时间优化的方式设定目标工作点。由此得到的优点是,加速力矩特别快速地产生,使得最终提高了机动车的加速度。优选地,根据机动车的加速踏板的操纵来检测最大动态规定。例如,当通过配属于加速踏板的传感器检测到该加速踏板的操纵速度超过预先给定的阈值时,识别出存在最大动态规定。在此,优选预先给定工作点作为目标工作点,在所述工作点中,电机产生最大的加速力矩。作为替代方案,预先给定工作点,在所述工作点中,电机产生较小的加速力矩,例如为最大的加速力矩的80%的加速力矩。
8、此外,其它有利的目标工作点是可能的。例如,预先给定工作点作为目标工作点,在所述工作点中,电机在磁场减弱最大时产生与在当前的实际工作点中一样的扭矩。
9、优选地,根据储能器的充电状态来预先给定目标工作点。如果预先给定工作点作为目标工作点,在所述工作点中电机产生发电机式的减速力矩,那么考虑储能器的充电状态是特别有利的。例如,如果储能器的充电状态高,则电机的发电机式运行可能导致储能器的过充电。相应地,然后优选预先给定工作点作为目标工作点,该工作点导致电机和功率电子器件中较大的内部损耗以及在储能器的方向上的较小的电流。于是再生的能量的效率较低,并且储能器必须在发电机式的减速力矩相同的情况下吸收较少的电能。相应地,在储能器的充电状态低时,优选预先给定工作点作为目标工作点,该工作点导致电机和功率电子器件中较低的内部损耗。
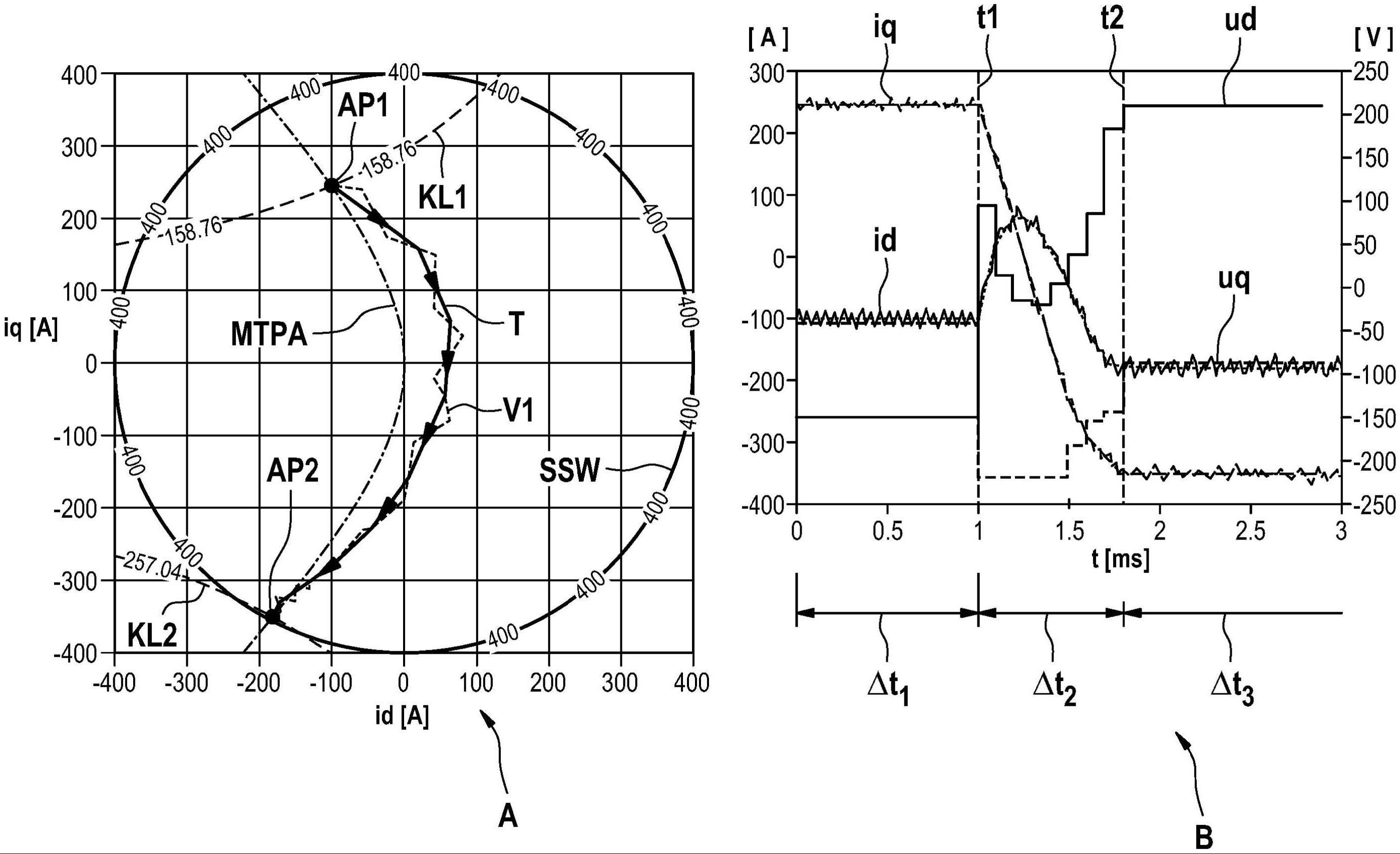
10、根据一种优选的实施方式设置了,求取用于实际电流矢量的目标轨迹,其中所述目标轨迹从实际工作点延伸到目标工作点,并且其中根据目标轨迹如此预测前馈控制,使得在设定目标工作点时,实际电流矢量的变化曲线至少基本上对应于目标轨迹。基于目标轨迹能够特别精确地预测引起目标工作点的时间优化的设定的前馈控制。
11、优选地,目标轨迹根据电机的模型来求取。也就是说,在求取目标轨迹时考虑电机的固有动态特性。电机的模型尤其描述了施加在电机绕组的相上的电端电压(一方面)与通过端电压引起的相电流(另一方面)之间的关系。例如,所述模型包含关于电机的电感和电阻的信息。
12、根据一种优选的实施方式设置了,预先给定阈电流值并且根据该阈电流值如此求取目标轨迹,使得在设定目标工作点时,电流矢量的电流值始终低于所述阈电流值。因此避免了超过阈电流值的电流值。这样高的电流值可能导致转子的永磁体的退磁且因此是非期望的。
13、优选地,预先给定阈电压值,其中根据该阈电压值如此求取目标轨迹,使得在设定目标工作点时,电机的电端电压的电压值始终低于所述阈电压值。由此也避免了电机过载。
14、根据一种优选的实施方式设置了,通过模型预测的调节器求取目标轨迹。由现有技术基本上已知了模型预测的调节,并且也称为模型预测控制(mpc,model predictivecontrol)。通过模型预测的调节器能够精确地求取时间优化的目标轨迹,使得通过根据目标轨迹预测的前馈控制实现了对目标工作点至少基本上时间优化的设定。优选地,模型预测的调节器根据电机的模型、预先给定的阈电流值和预先给定的阈电压值来求取目标轨迹。优选地,通过模型预测的调节器预测前馈控制。
15、根据本发明的用于运行电机的装置,所述电机具有可旋转地支承的转子和电机绕组,其中所述电机绕组通过功率电子器件与电储能器电连接,所述装置具有权利要求13的特征,其特征在于控制器,所述控制器专门设置用于,在按常规使用时,执行根据本发明的方法。也就是说,如果按照常规来使用控制器,则在控制器中或者通过该控制器执行根据本发明的方法。由此也得到已经提到的优点。其他优选的特征和特征组合从说明书以及权利要求中得到。优选地,所述控制器构造成微控制器。
16、根据一种优选的实施方式设置了,控制器具有第一计算单元和第二计算单元,其中第一计算单元具有电流调节器,并且其中第二计算单元具有模型预测的调节器。所述电流调节器构造用于,以场定向的方式调节电机。模型预测的调节器构造用于,求取目标轨迹并且优选预测前馈控制。由于针对模型预测的调节器和电流调节器采用了不同的计算单元,因此能够在基本上不改变目前为止的软件结构的情况下,将模型预测的调节器集成到被构造用于对电机进行场定向调节的现有的控制器中。所述计算单元尤其在其时钟速率上有所不同。优选地,第一计算单元的时钟速率大于第二计算单元的时钟速率。
17、根据本发明的电驱动系统具有电机,该电机具有可旋转地支承的转子和电机绕组,其中电机绕组通过功率电子器件与电储能器电连接。该驱动系统具有权利要求15的特征,它的特征在于根据本发明的用于运行电机的装置。由此也得到已经提到的优点。其他优选的特征和特征组合从说明书以及权利要求中得到。
- 还没有人留言评论。精彩留言会获得点赞!