电气系统和用于确定控制参量的值走势的方法和设备与流程
本发明涉及一种用于确定电气系统的控制参量的值走势的方法以及一种相应的设备。此外,本发明还涉及一种电气系统。电气系统可以尤其是电驱动器或者包括电驱动器。
背景技术:
1、因为在电气系统、例如电驱动器运行时会出现损耗,所以电气系统的部件、例如逆变器的功率模块或者机器的转子或定子会发热。为了避免过热和温度敏感的部件的由此导致的受损,借助传感器和模型来监控所出现的温度。
2、作为自我保护措施,使用并且执行降额或调节方法。对此的理解是,修正或调节电气系统的部件的运行状态,以避免超过临界温度。
3、为了选择电驱动器的合适的运行策略,有利的是,控制单元(英文为vehiclecontrol unit,vcu)(例如在车辆中)从电驱动器的控制器获取信息,即,在未来的时间间隔内,例如在接下来的1、5或10秒内,可以向电驱动器请求哪个功率,因而保护措施正好尚未被激活。在对有效范围预测或模型预测的调节的界定中,在此涉及对电驱动器的性能的预测。
4、为此存在不同的前向建模策略。因此基于当前的运行状态可以针对未来的时间间隔计算,是否希望调节。不过在此,上级的控制器仅获取是否可以保持当前的运行状况的信息。无法推导出对运行状况的可能需要的调整。
5、此外,可以基于当前的热状态在假定未来的时间间隔期间有最大负载的情况下计算,随这个负载会达到哪个温度。由预定的降额特性求出了相关的有限的负载状态。不过在此没有考虑到降额的迭代的特性,这就是说,瞬时温度对瞬时允许的负载的反馈。因此预测大多过于保守。
6、前向建模可以与不同的负载情况迭代地重复,至极限温度停止,但这是耗费的。倘若采取了降额放放,那么负载情况可以与降额条件一致地迭代,但这同样极为耗费。
7、模型预测方法由wallscheid等人的《使用模型预测控制对汽车驱动系统降额》(第四届电气传动和电力电子预测控制研讨会,2017年)已知。前提条件是,驾驶策略和降额一起被控制,但往往不是这样的,因为电驱动器不负责运行或驾驶策略并且上级的vcu又不负责自我保护。
8、最后,可以使用人工智能,但这要求耗费的数据生成和采集,因为预测的负载仅作为附加信息进入到驾驶策略中,但往往没有具体启动这一点。因此必须为训练数据进行耗费的特殊配置。
技术实现思路
1、本发明提供了带有独立权利要求的特征的用于确定电气系统的控制参量的值走势的一种方法和一种设备以及一种电气系统。
2、优选的实施方式是相应的从属权利要求的主题。
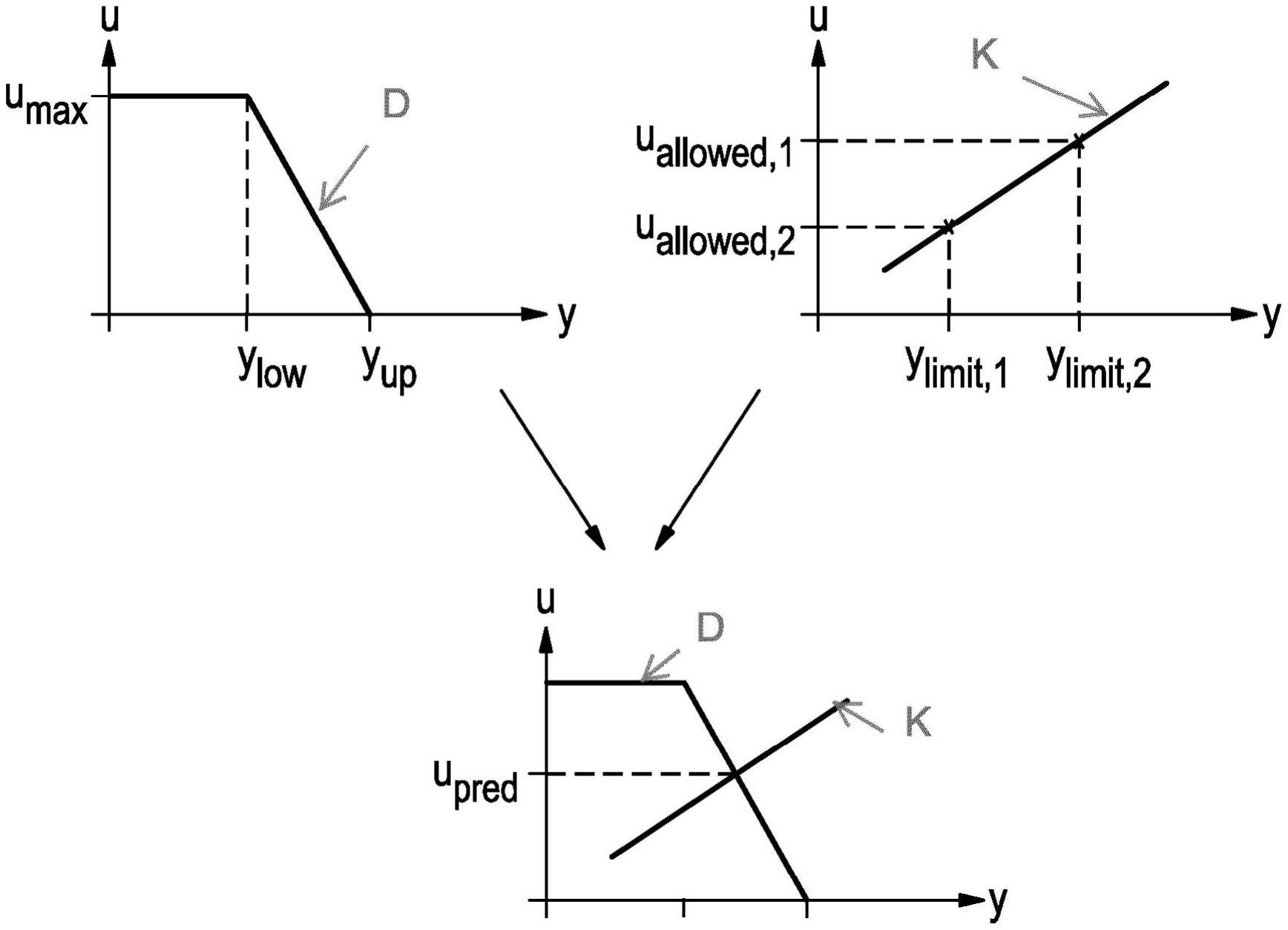
3、因此按照第一个方面,本发明涉及一种用于确定预定的时间间隔内电气系统的控制参量的值走势的方法。电气系统用控制参量驱控。由于电气系统的系统特性,与控制参量相关地在电气系统中设定输出参量。依赖于输出参量在时间间隔的起始时间点上的实际值并且依赖于控制参量在时间间隔内具有值零,求出在预定的时间间隔的最终时间点上输出参量的值。求出最终时间点上输出参量的第一预定的值和在最终时间点上输出参量的所求出的值的第一差。还求出在最终时间点上输出参量的至少一个第二预定的值与最终时间点上输出参量的所求出的值的至少一个第二差。预定时间间隔内控制参量的值走势,其中,值走势取决于最终时间点上的最终值并且通过指定最终值明确地确定。依赖于控制参量在时间间隔内具有预定的值走势,这样来求出控制参量的第一允许的值,即,在驱控电气系统时使在最终时间点上的输出参量的值等于所求出的第一差,其中,最终值等于第一允许的值。依赖于控制参量在时间间隔内具有预定的值走势,这样来求出控制参量的至少一个第二允许的值,使得在驱控电气系统时,输出参量在最终时间点上的值等于所求出的第二差,其中,最终值等于第二允许的值。借助控制参量针对输出参量的第一预定的值的第一允许的值并且借助控制参量针对输出参量的至少一个第二预定的值的至少一个第二允许的值,根据输出参量求出控制参量的允许的值的曲线。求出所求出的曲线和预定的降额函数的交点,其中,降额函数描述了与输出参量相关的在降额方法中最大允许的控制参量。时间间隔内控制参量的值走势被确定为是这样的值走势,针对该值走势,值走势的最终值在交点中具有控制参量的值。
4、按照第二个方面,本发明涉及一种用于确定预定的时间间隔内电气系统的控制参量的值走势的设备,其中,电气系统能用控制参量驱控,并且其中,由于电气系统与控制参量相关的系统特性,在电气系统中设定输出参量。所述设备包括计算装置,计算装置依赖于输出参量在时间间隔的初始时间点上的实际值,并且依赖于控制参量在时间间隔内具有值零,求出在预定的时间间隔的最终时间点上输出参量的值。此外,计算装置求出最终时间点上输出参量的第一预定的值和最终时间点上输出参量的所求出的值的第一差。此外,计算装置求出最终时间点上输出参量的至少一个第二预定的值和最终时间点上输出参量的所求出的值的至少一个第二差。计算装置预定时间间隔内控制参量的值走势,其中,该值走势取决于最终时间点上的最终值并且通过指定最终值明确地确定。计算装置依赖于控制参量在时间间隔内具有预定的值走势,这样来求出控制参量的第一允许的值,使得在驱控电气系统时,在最终时间点上的输出参量的值等于所求出的第一差,其中,最终值等于第一允许的值。计算装置依赖于控制参量在时间间隔内具有预定的值走势,这样来求出控制参量的至少一个第二允许的值,使得在驱控电气系统时,在最终时间点上的输出参量的值等于所求出的第二差,其中,最终值等于第二允许的值。计算装置借助控制参量针对输出参量的第一预定的值的第一允许的值并且借助控制参量针对输出参量的至少一个第二预定的值的至少一个第二允许的值,求出与输出参量相关的控制参量的允许的值的曲线。计算装置求出所求出的曲线和预定的降额函数的交点。降额函数描述了与输出参量相关的在降额方法中的最大允许的控制参量。计算装置将时间间隔内控制参量的值走势确定为这样的值走势,针对该值走势,值走势的最终值在交点中具有控制参量的值。此外,所述设备还包括接口,接口构造用于,输出控制参量的特定的值走势以控制电气系统。
5、按照第三个方面,本发明涉及一种电气系统,其带有用于确定电气系统的控制参量的值走势的按本发明的设备。此外,电气系统还包括控制装置,控制装置构造用于,在时间间隔内根据控制参量的特定的值走势控制电气系统。
6、按照本发明,预测控制参量的值走势,该值走势可以在预定的时间间隔内用于控制电气系统。时间间隔的初始时间点在此对应瞬时时间点或驱控方法的开始时间点。这样来计算控制参量的值走势,使得防止了使用降额方法或者由于主动采取降额而发生限制。
7、所述方法求出了最大可能的负载情况,电气系统在时间间隔内在不与降额发生冲突的情况下可以提供这种负载情况。所述方法允许了通过正好还可能的负载状态的合适的和有效的后向建模正确考虑到任意的降额曲线。控制参量的值走势因此也应当在考虑到整个时间间隔内的降额特性的情况下如所求出的那样用于控制。由此避免了控制参量基于降额特性的意外的变化。
8、通过求出输出参量在最终时间点上的值(其中控制参量在时间间隔内具有值零),描述了无负载情况下的衰减过程,这就是说,假定在时间间隔期间不施加另外的负载。
9、求出第一差或第二差对应相应的储备,例如温度储备,温度储备与无负载的情况相比是存在的并且因此针对在时间间隔内施加负载而保留。
10、控制参量的预定的值走势可以是恒定不变的阶跃函数。在这种情况下,控制参量在初始时间点上的值被设定到一个固定的值并且在时间间隔期间在所设定的值下被保留。负载阶跃可以用带有可伸缩的前因子的赫维赛德函数描述。由此能简单和快速地执行计算。
11、控制参量的预定的值走势也可以遵循一个预定的函数。控制参量的值例如可以线性地或二次方地上升。值走势因此是线性的或抛物线形的。
12、按照所述方法的一种实施方式,值走势也可以取决于控制参量在时间间隔的初始时间点上的开始值。控制参量在时间间隔内的特定的值走势相应地也可以取决于控制参量在时间间隔的初始时间点上的开始值。
13、按照所述方法的一种实施方式,控制参量的所求出的值走势作为针对运行或驾驶策略的输入信息提供给上级的系统。本发明尤其涉及一种用于驱控电气系统的方法,其中,控制参量的所求出的值走势用于驱控电气系统。
14、按照所述方法的一种实施方式,这样来驱控电气系统,使控制参量遵守时间间隔内的特定的值走势。但也可以规定,这样来控制所述控制参量,使这个控制参量在时间间隔内针对任意时间点小于或等于特定的值走势的对应的值。值走势因此预定了最大允许的走势,应当低于但不应超过该最大允许的走势。
15、所述方法能无迭代地执行。所述方法是快速的、极为计算有效的并且是准确的以及因此适用于同时考虑到例如逆变器的微控制器上驱动系中的多个有待保护的部件,而不会发生明显的计算负载或存储需求提升。用于建模和数据采集的耗费小。
16、至少一个控制参量(或调节参量)可以例如是电流强度或电压。此外,控制参量也可以是转矩,例如在控制参量来自上级vcu的驾驶策略的情况下,其用于驱控电气系统。
17、按照所述方法的一种实施方式,电气系统中的有待保护的输出参量是温度、压力等。
18、按照所述方法的另一种实施方式,通过控制参量针对输出参量的第一预定的值的第一允许的值的和控制参量针对所述输出参量的至少一个第二预定的值的至少一个第二允许的值的内插求出控制参量的允许的值的曲线。
19、按照所述方法的另一种实施方式,通过线性的或能线性化的模型说明输出参量与控制参量的相关性。所述方法尤其能使用在所有的电气系统中,电气系统具有要限制的状态参量或输出参量,状态参量或输出参量可以用线性的或能线性化的模型描述并且为状态参量或输出参量预定例如形式为曲线(降额曲线)的降额方法。曲线可以描述在负载或激励参量与有待保护的输出参量之间的相互关系。线性的或能线性化的模型可以涉及时不变特性的描述(英文为linear time invariant,lti)或线性的参数变化的特性(英文为linearparameter variant,lpv)。
20、按照所述方法的另一种实施方式,值走势是跳跃式的,其中,针对输出参量的预定的值,通过下列公式计算控制参量的允许的值uallowed:
21、
22、其中,δy是所求出的差并且φ(t1)是最终时间点t1上配属于线性的或能线性化的模型的阶跃响应的值。
23、按照所述方法的另一种实施方式,控制参量小于基于所述电气系统的系统限制预定的阈值。控制参量在时间间隔内的值走势被确定为这样的值走势,倘若控制参量的第一允许的值和控制参量的至少一个第二允许的值大于预定的阈值,那么针对该值走势,值走势的最终值具有预定的阈值。
24、按照所述方法的另一种实施方式,电气系统是电驱动器,其中,至少一个输出参量包括电气系统的至少一个部件的温度。
25、按照所述方法的另一种实施方式,根据控制参量的特定的值走势来控制电驱动器的相电流或转矩。
26、按照所述设备的另一种实施方式,计算装置构造用于,通过控制参量针对输出参量的第一预定的值的第一允许的值的和控制参量针对输出参量的至少一个第二预定的值的至少一个第二允许的值的内插求出控制参量的允许的值的曲线。
- 还没有人留言评论。精彩留言会获得点赞!