驱动系统、控制方法以及控制程序与流程
本发明涉及驱动系统、该驱动系统中的控制方法以及用于控制该驱动系统的控制程序。
背景技术:
1、作为用于对物体与物体接触时产生的动能进行衰减或控制的机构,提出了弹簧、橡胶等弹性体、阻尼器(例如液压阻尼器)、气缸等各种结构并进行了实用化。另外,也存在采用如下控制的结构,该控制使用了各种传感器的感测结果。
2、使用弹簧、橡胶的机构依赖于组装的弹簧、橡胶的物理特性,决定使动能衰减的性能。关于阻尼器,依赖于尺寸、孔口直径等,决定使动能衰减的性能。气缸依赖于尺寸、气压等来决定使动能衰减的性能。这些机械结构存在无法控制自重以下的力、需要与对象相应的设计和机构、位置精度低等问题。
3、另外,也存在基于传感器的感测结果来控制由空气、电机等驱动的致动器(例如缸)的结构。作为这样的电气结构,有以下那样的现有技术。
4、例如,日本特开2006-074987号公报(专利文献1)公开了一种沿着路径的典型地为线性的可控制的力源,该力源用于主动地吸收来自在粗糙的表面上移动的车辆车轮支承组件的能量,或者向该组件施加能量,以便使向支承在车轮支承组件上的车身传递的力变得相当小。
5、日本特开2006-125633号公报(专利文献2)公开了用于在交通工具内主动地悬架实际设备的方法。公开的方法包含:基于由实际设备对该控制信号的响应所指示的实际设备的特性与基准设备的特性之差来变更控制信号。
6、日本特表2013-521443号公报(专利文献3)公开了构成为相对于基准框架控制主体的位置的主动振动抑制设备。
7、现有技术文献
8、专利文献
9、专利文献1:日本特开2006-074987号公报
10、专利文献2:日本特开2006-125633号公报
11、专利文献3:日本特表2013-521443号公报
技术实现思路
1、发明要解决的课题
2、上述那样的电气致动器的控制逻辑等结构可能复杂化。例如,需要考虑与致动器机械接触的物体的特性等来构成控制逻辑,另外,当控制逻辑所包含的参数存在多个时,调谐也花费工夫。
3、本发明的一个目的在于提供一种包含致动器的驱动系统,该致动器能够容易地进行用于控制逻辑的结构、设备设计的仿真等。
4、用于解决课题的手段
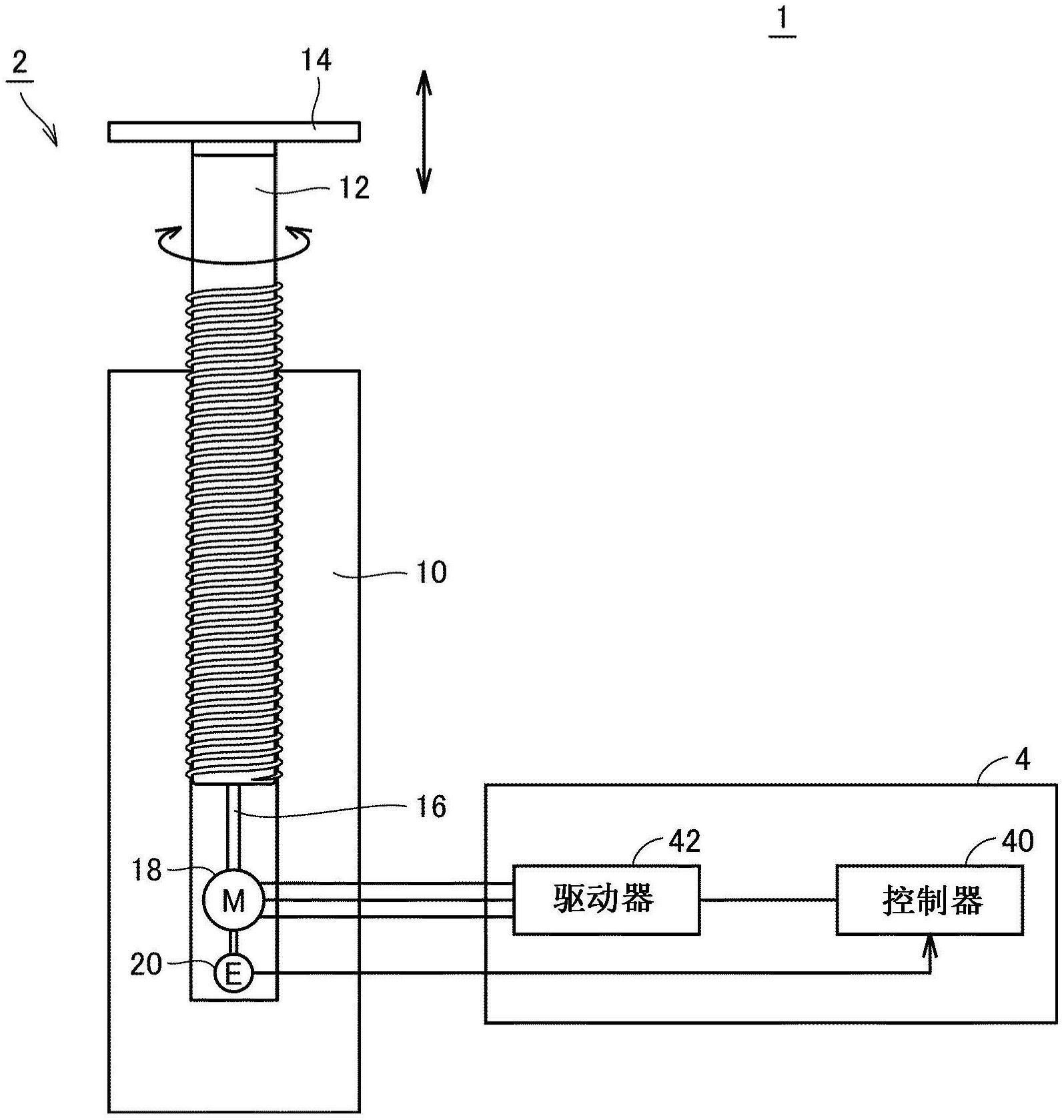
5、本发明一例的驱动系统包含:致动器,其被电机驱动而产生位移;驱动器,其对电机进行驱动;以及控制器,其向驱动器施加控制指令,控制器包含:模型构建部,其基于通过对致动器施加来自外部的载荷而产生的位移,构建物理模型;第1指令生成部,其以使致动器产生遵循物理模型的位移的方式,生成对电机的控制指令;决定部,其决定弹簧常数;第2指令生成部,其以使得产生基于弹簧常数与致动器所产生的位移之积而计算出的驱动力的方式,生成对电机的控制指令;以及选择部,其选择使来自第1指令生成部和第2指令生成部中的哪一个的控制指令有效化。
6、根据该结构,能够适当地承受来自外部的载荷,缓和物体与物体接触时产生的过大的载荷,或者能够选择性地执行抑制点载荷的产生的行为、和从致动器产生遵循理想弹簧行为的载荷的行为。
7、也可以是,选择部在使来自第1指令生成部的控制指令有效化时,如果满足规定的切换条件,则使来自第2指令生成部的控制指令有效化。根据该结构,能够实现如下动作:在按照来自第1指令生成部的控制指令进行了缓和施加于致动器的载荷的动作后,从致动器产生规定的载荷。
8、切换条件也可以基于从对致动器施加来自外部的载荷起的经过时间。根据该结构,例如,在从致动器开始动作起经过了规定时间的情况下,能够实现切换行为的控制。
9、切换条件也可以基于致动器所产生的位移。根据该结构,例如,在致动器收缩了规定量的情况下,能够实现切换行为的控制。
10、也可以是,第1指令生成部将指定电机的目标位置的位置指令作为控制指令输出,第2指令生成部将指定电机应产生的转矩的转矩指令作为控制指令输出。根据该结构,通过第1指令生成部控制致动器的位置,能够实现理想弹簧行为。另外,通过第2指令生成部控制电机应产生的转矩,能够遵循理想弹簧行为来控制致动器产生的载荷。
11、也可以是,模型构建部在从外部向致动器施加规定的载荷时,构建物理模型。根据该结构,能够维持静止的状态直到从外部施加规定的载荷为止,并且当从外部施加规定的载荷时开始作为弹簧的行为。
12、决定部也可以按照每个控制周期设定弹簧常数。根据该结构,能够根据目的和状况来设定各控制周期中的最佳的弹簧常数。
13、按照本发明的另一例,提供被电机驱动而产生位移的致动器的控制方法。控制方法包含以下步骤:基于通过对致动器施加来自外部的载荷而产生的位移,构建物理模型;决定弹簧常数;控制电机使致动器产生遵循物理模型的位移;以及在控制电机使致动器产生遵循物理模型的位移时,如果满足规定的切换条件,则切换电机的控制以产生基于弹簧常数与致动器所产生的位移之积而计算出的驱动力。
14、按照本发明的又一例,提供用于控制被电机驱动而产生位移的致动器的控制程序。控制程序使计算机执行以下步骤:基于通过对致动器施加来自外部的载荷而产生的位移,构建物理模型;决定弹簧常数;控制电机使致动器产生遵循物理模型的位移;以及在控制电机使致动器产生遵循物理模型的位移时,如果满足规定的切换条件,则切换电机的控制以产生基于弹簧常数与致动器所产生的位移之积而计算出的驱动力。
15、发明的效果
16、根据本发明的某个方面,可实现包含能够容易地进行用于控制逻辑的结构、设备设计的仿真等的致动器的驱动系统。
技术特征:
1.一种驱动系统,其中,该驱动系统具有:
2.根据权利要求1所述的驱动系统,其中,
3.根据权利要求2所述的驱动系统,其中,
4.根据权利要求2所述的驱动系统,其中,
5.根据权利要求1~4中的任意一项所述的驱动系统,其中,
6.根据权利要求1~5中的任意一项所述的驱动系统,其中,
7.根据权利要求1~6中的任意一项所述的驱动系统,其中,
8.一种控制方法,其是被电机驱动而产生位移的致动器的控制方法,其中,该控制方法具有以下步骤:
9.一种控制程序,其用于控制被电机驱动而产生位移的致动器,其中,所述控制程序使计算机执行以下步骤:
技术总结
驱动系统包含:致动器,其被电机驱动而产生位移;驱动器,其对电机进行驱动;以及控制器,其向驱动器施加控制指令,控制器包含:模型构建部,其基于通过对致动器施加来自外部的载荷而产生的位移,构建物理模型;第1指令生成部,其以使致动器产生遵循物理模型的位移的方式,生成对电机的控制指令;决定部,其决定弹簧常数;第2指令生成部,其以使得产生基于弹簧常数与致动器所产生的位移之积而计算出的驱动力的方式,生成对电机的控制指令;以及选择部,其选择使来自第1指令生成部和第2指令生成部中的哪一个的控制指令有效化。
技术研发人员:小川敦,稻目幸生,T·艾美
受保护的技术使用者:欧姆龙株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!